Цель лекции: Изучение МНРЛС.
Вопросы лекции:
20.1. Назначение, выполняемые функции;
20.2. Распределение частотного диапазона;
20.3. Состав типовой МНРЛС;
20.4.МНРЛС «Гроза»;
20.5. Weather radar;
20.6. Weather radar В737.
Назначение, выполняемые функции
Метеонавигационные радиолокационные станции (МНРЛС) позволяют обнаружить зоны грозовой деятельности и обойти их. При наличии облачных структур на расстоянии до 200 км по курсу полета МНРЛС сигнализируют об этом пилотам. Для решения навигационных задач предусмотрен режим обзора рельефа поверхности земли. В последние годы в соответствии с документами ICAO авиакомпаниям рекомендуется использовать бортовые метеорадары обнаруживающие так называемый «сдвиг ветра» при взлете и посадке ВС, который представляет реальную опасность для ЛА и может привести к катастрофе.
Под «сдвигом ветра» подразумеваются низковысотные турбулентные зоны, находящиеся впереди основного грозового фронта и характеризующиеся малым содержанием влаги. Для обнаружения «сдвига ветра» используются специальные алгоритмы, основанные на доплеровской обработке принятого сигнала.
Сдвиг ветра обнаруживается на дальности до 10 км.
Особенность МНРЛС – автономность. Информация о координатах и характере радиолокационных целей извлекается из отраженного от целей зондирующего сигнала. Все МНРЛС работают в режиме импульсного излучения сигнала с длиной волны около 3,2 см.
Функции МНРЛС:
1.Обнаружение, определение координат и степени опасности ГМО.
2.Получение равноконтрастного изображения земной поверхности и определение координат наземных объектов.
3.Навигационный обзор земной поверхности с использованием симметричной ДН и определение координат наземных объектов.
4.Измерение угла сноса ЛА.
5. Обнаружение сдвига ветра.
Требования к МНРЛС:
МНРЛС должны обеспечивать:
- указание углового положения, дальности и степени опасности гидрометеорологических образований (ГМО), положения ЛА относительно наземных ориентиров, а также угла сноса ЛА для визуального отображения экипажу;
- выдачу информации в виде электрических сигналов в другое оборудование, если эти сигналы используются.
Распределение частотного диапазона

Состав типовой МНРЛС
В состав типовой МНРЛС входят 1 или 2 приемопередатчика (если 2, то с волновым переключателем), антенный блок, волноводный тракт и пульт управления. Если на борту есть система индикации, для вывода метеоинформации используются ее индикаторы. Для этой цели в приемопередатчике предусматривается стандартный цифровой выход. При отсутствии системы индикации в состав метеорадиолокатора включается свой экранный индикатор.
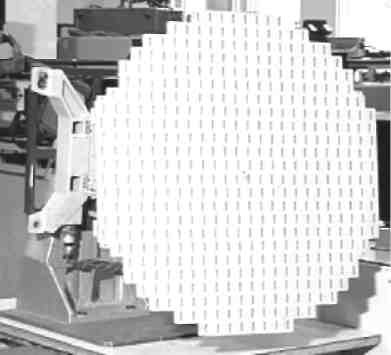
Антенный блок предназначен для
излучения СВЧ-импульсов, генерируемых
приемопередатчиком, в виде узкого луча
вертикальной поляризации и приема
отраженных сигналов. МНРЛС работает в
сантиметровом диапазоне, частота излучения
9345±15МГц. Антенный блок
Рис.20.1. Антенный блок радиолокатора
устанавливается под радиопрозрачным обтекателем в носовом отсеке. Он состоит из волноводно-щелевой антенной решетки и электропривода с редуктором (рис.20.1). Антенная решетка сканирует влево-вправо от направления полета в диапазоне ±90°, скорость сканирования не менее 15 раз в минуту. В диапазоне сканирования метеолокатор испускает множество отдельных радиолучей (до 1024), каждый луч разбивается при приеме на множество расположенных друг за другом точек (типовое значение 256 точек, максимальное - 512) и для каждой точки измеряется уровень отраженного сигнала, который свидетельствует о наличии и плотности облаков и о турбулентности.
Приемопередатчик обрабатывает полученную информацию и выдает результаты измерений турбулентности в систему индикации. Выдаваемая информация масштабируется в зависимости от установленного на пульте управления диапазона дальности. На экране индикатора уровни отраженного сигнала изображаются точками разного цвета, обычно по мере увеличения уровня отраженного сигнала цвета располагают так: черный, зеленый, желтый, красный. Для турбулентности предусмотрен коричневый цвет, для сильной турбулентности - пурпурный. В результате точки создают на экране очертания метеообразований, расположенных в направлении полета. Как можно видеть на рис.20.2, на индикаторе видны очертания облачности, находящейся прямо по курсу полета. Более темные (красные) зоны соответствуют более опасным метеообразованиям.
Рис.20.2. Изображение на индикаторе радиолокатора
При эволюциях ЛА метеорадиолокатор стабилизирует луч антенны. Для этого он принимает информацию по углам крена и тангажа от ИНС.
Чтобы ускорить обзор пилот может с пульта управления уменьшить диапазон сканирования до ±45°. Также он может задавать угол наклона антенны в пределах ±15° градусов от горизонтальной оси ЛА. Это позволяет отстроиться от помех и повысить четкость изображения, рассматривать вертикальную структуру облачности, а при наклоне антенны вниз, к земле – использовать МНРЛС для обзора рельефа земной поверхности в целях навигации.
При высоте полета 12000 м МНРЛС позволяет обнаружить грозовые образования и города на расстоянии до 550 км.
Типы МНРЛС: Гроза-154, Градиент, Контур, Буран-85, МНРЛС-85
МНРЛС «Гроза».
Подробно рассматривается в [2] рекомендуемой литературы.
Общие сведения. Назначение.
Радиолокационная станция (РЛС) «Гроза М» предназначена для обеспечения безопасности полетов в сложной метеообстановке и отсутствии визуальной видимости и позволяет экипажу самолета решать следующие задачи:
-наблюдать на экране индикатора метеообстановку впереди самолета и выявлять облачности с турбулентной грозовой деятельностью;
- методом контурной индикации выделять среди облачности зоны опасных грозовых очагов и возможность их обхода;
- наблюдать на экране индикатора панораму пролетаемой местности в пределах азимутальных углов + 100° относительно строительной оси самолета и на дальности, определяемой техническими возможностями РЛС с целью навигационной ориентировки по характерным радиолокационным ориентирам и корректировать направление полета;
- измерять угол сноса самолета (в зависимости от варианта).
Радиолокатор помехоустойчив. При крене и тангаже самолета изображение на экране индикатора не искажается за счет применения схемы гиростабилизации плоскости обзора.
Комплект и размещение на самолете (для «ГРОЗА М-154»).
В комплект РЛС «Гроза М» входят следующие блоки и устройства, которые на самолете размещены:
- антенный блок ГР1БМ с рефлектором — в носовом радиоотсеке под радиопрозрачным обтекателем;
- моноблок, состоящий из групповой амортизационной рамы ГР345.2,на которой установлены два приемопередатчика ГР2БМ (основной и резервный), блок стабилизации и управления ГР720 и волноводный коммутатор ГР47 - в первом техническом отсеке между шпангоутами № 5-7 слева от оси самолета;
- волноводный тракт ГР32-154 соединяет приемопередатчики с волноводным коммутатором через гермошпангоут № 3 с антенной;
- коробка коммутации ГР17 и контрольный соединитель -рядом с моноблоком;
- два индикаторных устройства ГР430 на индивидуальных рамах ГРЗЗЗ с козырьками — на боковых пультах пилотов;
- блок управления и формирования развертки ГР452 — на среднем пульте пилотов;
- второй контрольный соединитель «Контроль Гроза» — на правом боковом пульте пилота.
Основные эксплуатационно-технические характеристики
(для «ГРОЗА М-154» с диаметром антенны 760мм).
1. Средняя дальность наблюдения:
зон грозовой деятельности среднего развития, км, не менее.......... 200
особо крупных городов и промышленных центров, км, не менее......... 280
областных городов и средних промышленных центров, км, не менее......... 230
водоемов, рек и незастроенных участков земн. поверхности, км, не менее.... 150
2. Диапазон высот полета, в котором обеспечивается равномерная контрастность радиолокационного изображения земной поверхности, м 7000—9000
3. Диапазон углов наклона оси диаграммы направленности относительно плоскости горизонта, град................... вверх 10 вниз 15
4. Диапазон углов азимутального обзора в обе стороны относительно строительной оси самолета, град........................................... ± 100
5. Угол крена и тангажа, при котором система гиростабилизации обеспечивает устойчивое изображение, град.................................. 20
6. Частота азимутального сканирования антенны, циклов/мин............ 10 + 3
7. Частота излучаемых СВЧ колебаний, МГц 9375
8. Длительность излучаемых радиоимпульсов, мкс....................... 3,5 ± 0,3
9. Частота повторения излучаемых радиоимпульсов, Гц......400
10. Минимальная импульсная мощность излучения, кВт................ 9
11. Чувствительность приемного устройства, дБ/мВт, не менее............ 100
12. Ширина диаграммы направленности антенны, град, не более.............. 3
13. Нелинейность развертки на экранах индикаторов, %, не более.......... 20
14. Масштабы развертки на экранах индикаторов плавнорегулируемых, км.................. 10—375
15. Количество меток дальности, расположенных на развертке в рабочей части экрана индикаторного блока, должно быть:
при крайнем левом положении регулятора«Масштаб»....... метки отсутствуют
при крайнем правом положении регулятора «Масштаб».... 4 метки по 25
км и 2 метки по 100 км
16. Потребляемая мощность по цепям питания:
200/115 В 400 Гц, ВА, не более............. 450
36 В 400 Гц, В-А, не более..................... 36
27 В, Вт................................................ 120
17. Масса комплекта, кг.............................. 60
Функциональная схема и принцип работы.
РЛС «Гроза М» представляет собой автономную импульсную РЛС трехсантиметрового диапазона волн со сканирующей в азимутальной плоскости антенной. В соответствии с тактическим назначением РЛС «Гроза М» эксплуатируется в следующих режимах работы: «Готов», «Земля», «Метео», «Контур», «Контроль» (или вместо «Контроль» - «Снос» в зависимости от варианта).
Необходимый режим работы обеспечивается установкой переключателя «Режим» на блоке управления и формирования развертки или на индикаторном блоке, в зависимости от комплектации(типа ВС).
1. Режим «Готов» является вспомогательным.
В этом режиме РЛС подключается к питающим напряжениям бортсети самолета без включения высокого напряжения передатчика и находится в состоянии готовности к работе.
2. Режим«Земля».
В этом режиме на индикаторах в полярных координатах (азимут — дальность) воспроизводится непрерывная радиолокационная карта земной поверхности, расположенная впереди самолета в пределах азимутальных углов ± 100 ° относительно строительной оси самолета.
Для получения равноконтрастного изображения фона земной поверхности на экранах индикаторов в режиме «Земля» на масштабах менее 200 км обзор земной поверхности осуществляется веерной диаграммой направленности вида «Косеканс - квадрат». Для получения такой диаграммы направленности применяются зеркало антенного рефлектора двойной кривизны и схема коммутации диаграмм направленности с использованием ферритового вращателя плоскости поляризации электромагнитной волны, расположенного в антенном облучателе.
На масштабах от 200 до 300 км, в целях повышения дальности наблюдения на экранах индикаторов фона земной поверхности и промышленных центров, обзор производится поочередно веерной и узкой (игольчатой) диаграммами направленности. Переключение плоскости поляризации волны происходит в крайних положениях антенны, причем при движении рефлектора антенны влево формируется веерная диаграмма, а вправо -игольчатая.
При использовании масштаба свыше 300 км обзор земной поверхности осуществляется только игольчатым лучом, так как игольчатый луч имеет коэффициент направленного действия в два раза больше, а следовательно, дальность наблюдения получается наибольшей. При этом, благодаря особенностям построения высокочастотной части антенны, обеспечивается эффективное перекрытие диаграммой всего индицируемого на экране диапазона дальностей.
В режиме «Земля» схема видеоусилителя индикаторного устройства видоизменяется. Усилитель становится трехтоновым, что дает возможность получить на экране индикатора контрастное трехтоновое изображение местности, лежащей впереди самолета.
3. Режим «Метео» предусмотрен для получения на экране радиолокационного изображения воздушной обстановки. Оно может содержать отражения от различных гидрометеообразований в атмосфере: грозовых фронтов, областей с повышенной турбулентностью движения воздушных масс, вихреобразований и других явлений. Кроме того, этот режим используется для обнаружения горных вершин и определения достаточности превышения самолета над ними, а также для обнаружения других самолетов, находящихся на том же эшелоне.
В режиме «Метео» на всех масштабах используется узкая диаграмма
направленности, что позволяет исключить наблюдения в этом режиме мешающих отражений от земной поверхности на всех высотах, превышающих 1000 м.
При необходимости просмотра пространства под другими углами места диаграмма направленности антенны может быть наклонена вручную относительно плоскости горизонта вверх до 10° и вниз до 15° при одновременном сохранении работоспособности системы гиростабилизации. При этом возможно появление на экране индикаторов отражений от земной поверхности на дальностях, зависящих от установленного угла наклона.
4. Режим «Контур». В данном режиме экипажем оценивается степень опасности полета в обнаруженной зоне грозовой деятельности или мощнокучевой облачности методом контурной индикации. Возможность выделения опасных зон основана на том, что интенсивность сигнала, отраженного от них, значительно больше, чем интенсивность сигнала, отраженного от неопасных зон.
В схеме видеоусилителя сильные сигналы, соответствующие опасным зонам, подавляются и на их месте появляются темные контуры, контрастно выделяющиеся на светлом фоне, образованном отражениями от неопасных зон.
В режиме «Контур» используется узкая диаграмма направленности. Включается схема ВАРУ, исключающая возможность ошибочной оценки близкой неопасной облачности, дающей сильный отраженный сигнал как опасный.
5. Режим «Контроль» используется для проверки работоспособности каналов РЛС: индикации, приемного, передающего и гиростабилизации.
В режиме «Контроль» сигнал + 27 В из блока управления и формирования развертки поступает в блок стабилизации и управления. При этом в блоке стабилизации и управления отключаются цепи подачи напряжений, пропорциональных крену и тангажу, а вместо них подключается выход схемы формирования контрольных напряжений крена и тангажа. Сигнал отработки каналом гиростабилизации контрольных напряжений сравнивается на амплитудных дискриминаторах с эталонными сигналами. Выходы амплитудных дискриминаторов подключаются на входы видеоусилителей индикаторов для индикации сигналов контроля канала гиростабилизации, при нормальной работоспособности которого на экранах индикаторов высвечиваются три сектора шириной (15 + 10)° на азимутах 270, 0 и 90°.
В режиме «Контроль» в блоке управления и формирования развертки включается генератор контрольных старт-импульсов, которые запускают схемы формирования развертки, импульсов подсвета, меток дальности и включается питание индикаторных блоков. Старт-импульсы режима «Контроль» опережают импульсы передатчика, которые индицируются на экране электронно-лучевой трубки (ЭЛТ), свидетельствуя о работоспособности приемопередающего канала, а нормальное функционирование индикаторных блоков в режиме самоконтроля свидетельствуют о работоспособности канала индикации. Таким образом, работоспособность РЛС проверяется в режиме «Контроль» без излучения антенной электромагнитной СВЧ энергии, исключая при этом возможность облучения людей на земле.
На самолетах ТУ-154М возможен вариант установки РЛС, где вместо режима «Контроль» применен режим «Снос». В этом случае, при отказе ДИСС-013, экипаж может измерить угол сноса самолета и использовать эту информацию для самолетовождения (СВЖ).
6. Режим «Снос» позволяет измерять УС. При установке переключателя в положение «Снос» радиолокатор производит обзор земной поверхности, но автоматическое движение его антенны по азимуту прекращается. Совмещение проекции оси ДН антенны на земную поверхность с истинной линией пути самолета, необходимое для измерения УС, производится азимутальным перемещением антенны посредством клавиш. 
Скорость перемещения регулируется при этом регулятором «Скан».
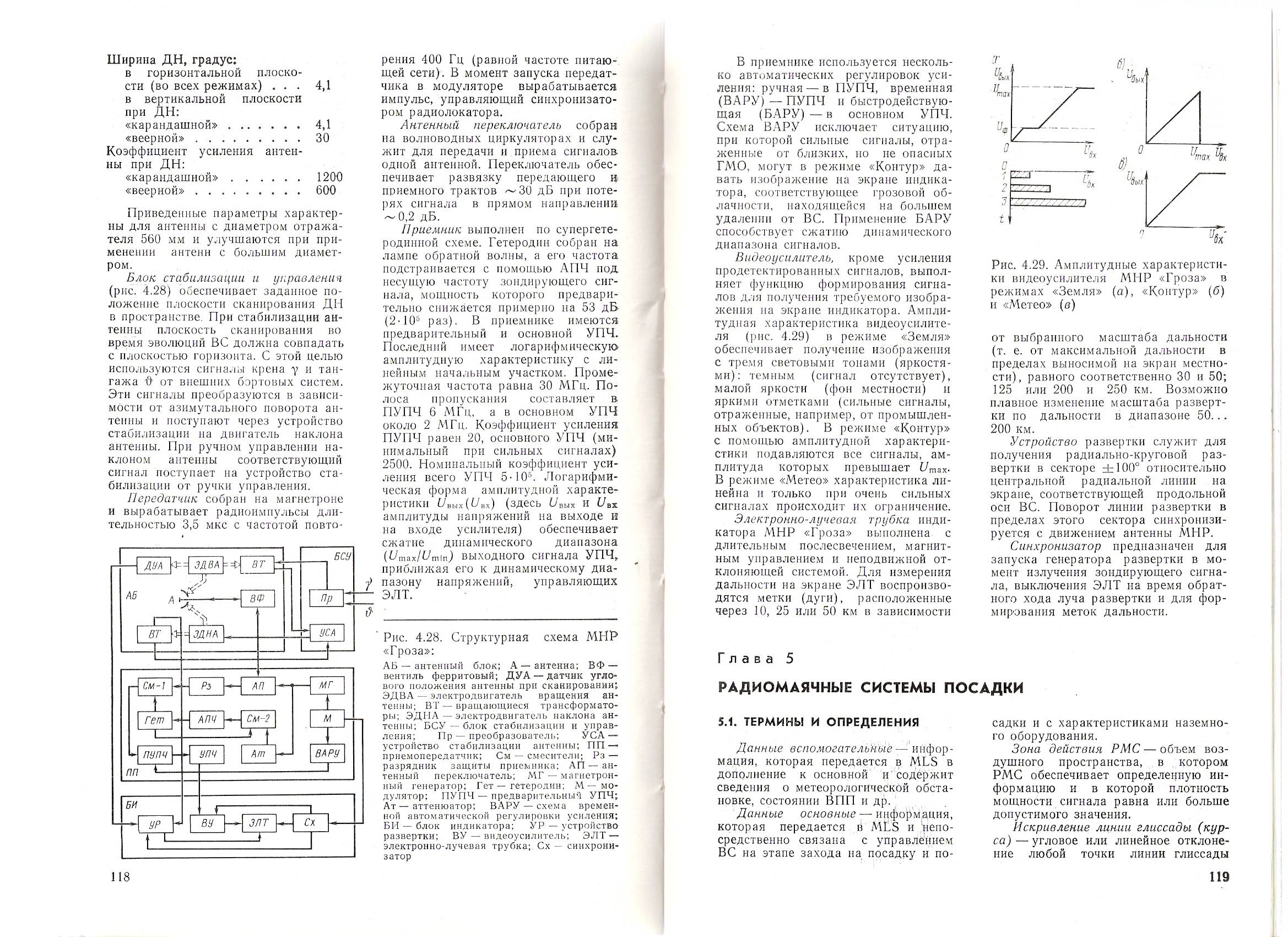
На рис.1 представлена упрощенная функциональная схема РЛС «Гроза М». Изображение всех имеющихся связей в каждом блоке и между ними значительно усложнило бы функциональную схему.
Поэтому в данной схеме принцип работы РЛС рассматривается поканально: передающий, приемный, канал автоматической подстройки частоты (АПЧ), индикаторный канал, канал синхронизации работы РЛС, канал стабилизации и управления антенной и канал электропитания.

Рис. 1. Функциональная схема РЛС «Гроза М».
Передающий канал состоит из реле времени, двухкаскадного магнитотиристорного модулятора, магнетронного генератора, волноводного тракта с антенным переключателем (АП) и антенны, работающей на передачу.
При включении РЛС в любом режиме, кроме «Готовность», напряжение 115 В 400 Гц подается на вход схемы магнитного модулятора через реле времени. Задержка необходима для прогрева катода магнетрона (на магнетрон, вне зависимости от режима, подается напряжение накала -6,3 В) до нормального теплового режима и в зависимости от температуры окружающей среды время прогрева изменяется от 3 до 5 минут.
Модулятор содержит два сжимающих каскада с полным разрядом накопительных конденсаторов. С выхода модулятора высоковольтные импульсы отрицательной полярности поступают на катод магнетрона.
Магнетрон генерирует мощные импульсы СВЧ колебаний, длительность и форма которых определяются магнитным модулятором, содержащим специальную формирующую линию. СВЧ импульсы с несущей частотой генерации магнетрона fм = (9370 ± 20) МГц через АП, выполненный на ферритовых циркуляторах, передаются по волновому тракту в виде бегущей волны электромагнитного поля в антенну и излучаются ею в пространство в пределах узкой или веерной диаграммы направленности.
Формирование антенной узкого или веерного луча обеспечивается ферритовым вращателем плоскости поляризации.
Одновременно с импульсом, питающим магнетрон, во втором сжимающем каскаде модулятора формируются отрицательные и положительные импульсы бланкирования и старт-импульсы.
Импульсы бланкирования предназначены для запирания приемных устройств другой бортовой аппаратуры, работоспособность которой может быть нарушена при излучении мощных зондирующих импульсов РЛС.
Старт-импульсы предназначены для запуска канала синхронизации РЛС и временной автоматической регулировки усиления (ВАРУ). Старт-импульсы обеспечивают синхронизацию работы всей РЛС. Синхронизация РЛС от бортсети 115 В 400 Гц является основной особенностью построения функциональной схемы РЛС.
Ферритовый АП (циркулятор) предназначен для автоматического переключения антенны с передачи на прием, а также выполняет роль согласующего устройства между магнетроном и его нагрузкой — сканирующей антенной, волноводный тракт которой содержит вращающее волноводное сочленение. Значительное влияние на изменение нагрузки магнетрона при сканировании антенны оказывает антенный обтекатель, который является одним из важнейших элементов РЛС, устанавливаемых на скоростных самолетах. Постоянство нагрузки магнетрона обеспечивает повышенную стабильность частоты и постоянство излучаемой им мощности, что способствует улучшению условий работы схемы АПЧ и гетеродина. Отраженный от нагрузки сигнал в момент излучения СВЧ импульсов не воздействует на магнетрон, а отводится ферритовым циркулятором в разрядник защиты приемника (РЗП), который в режиме излучения зондирующего СВЧ импульса закорачивает вход приемника, предохраняя кристаллические смесительные диоды от выхода из строя.
Приемный канал включает в себя антенну, волноводный тракт с антенным переключателем и разрядником защиты приемника, балансный смеситель, гетеродин, предварительный усилитель промежуточной частоты (ПУПЧ), УПЧ и схему ВАРУ. Приемник выполнен по супергетеродинной схеме, обеспечивающей наибольшую чувствительность и избирательность.
Энергия, отраженная от земной поверхности или от различных гидрометеообразований в атмосфере, принимается антенной и по волноводному тракту через вращающееся сочленение, циркулятор и погашенный РЗП поступает в балансный смеситель (БС) приемника.
В БС поступают также непрерывные СВЧ колебания местного гетеродина, выполненного на лампе обратной волны (ЛОВ). В нагрузке БС выделяется промежуточная частота 30 МГц. БС обеспечивает высокий коэффициент преобразования частоты и подавления шумов гетеродина, что существенно повышает чувствительность приемника. Импульсы промежуточной частоты с выхода балансного смесителя поступают на УПЧ.
Усилитель промежуточной частоты конструктивно выполнен в виде последовательного соединения двух узлов ПУПЧ и основного УПЧ. Это позволяет разместить входные каскады усилителя в непосредственной близости от смесителя, образуя высокочастотную головку (ВЧГ). Такая конструкция позволяет исключить длинный кабель связи между смесителем и УПЧ и избежать затухания в нем. Кроме того, при приеме слабых сигналов общий коэффициент усиления достигает сотен тысяч, что может быть обеспечено в УПЧ с последовательным включением не менее девяти резонансных каскадов на транзисторах, а при таком количестве каскадов обеспечить устойчивую работу линейки УПЧ затруднительно. Устранению этого недостатка и способствует использование отдельного узла ПУПЧ с коэффициентом усиления порядка двадцати и сравнительно широкой полосой пропускания, равной примерно 6 МГц. Напряжение промежуточной частоты усиливается в четырехкаскадном ПУПЧ и поступает на вход основного УПЧ.
Основной УПЧ выполнен на транзисторах, имеет шесть усилительных каскадов и заканчивается видеодетектором.
УПЧ имеет линейно-логарифмическую амплитудную характеристику (линейная характеристика используется при усилении слабых сигналов), что позволяет сжать динамический диапазон входных сигналов и приблизить его к динамическому диапазону сигналов, воспроизводимых электронно-лучевой трубкой. Для получения логарифмической амплитудной характеристики (ЛАХ) используется суммирующий усилитель. При приеме сильных сигналов каскады УПЧ последовательно, начиная от последнего, переходят в режим детектирования и видеоимпульсы, выделяемые ими, суммируются в специальном усилителе, на который также поступают видеоимпульсы с детектора.
Регулировка усиления приемного канала осуществляется схемой временной автоматической регулировки усиления -ручной регулировки усиления (ВАРУ-РРУ). Узел ВАРУ-РРУ запускается старт-импульсом модулятора и формирует специальные импульсы отрицательной полярности для регулирования коэффициента усиления ПУПЧ и импульсов бланкирования ПУПЧ. Импульс бланкирования во всех режимах работы РЛС воздействует на ПУПЧ и запирает приемник на время излучения мощного СВЧ импульса передатчика. Импульс ВАРУ подается на вход ПУПЧ в режиме «Контур», изменяя коэффициент усиления во времени. При этом сильные сигналы, отраженные от близлежащих слоев «неопасной» облачности, не просматриваются на экране в виде темных контуров, соответствующих «опасным» зонам облачности.
Кроме режима «Контур», схема ВАРУ используется в режиме «Земля», улучшая качество изображения на экранах индикаторов на масштабе до 30 км. Управление схемой ВАРУ осуществляется с пульта управления ручками «Режим» и «Масштаб».
Ручная регулировка усиления (РРУ) приемника осуществляется при помощи переменного резистора.
С выхода УПЧ видеоимпульсы поступают на вход видеоусилителей индикаторных блоков.
Канал автоматической подстройки частоты (АПЧ). Система АПЧ в составе РЛС является неотъемлемой частью приемного канала и только по методическим соображениям рассматривается как самостоятельный канал.
Система АПЧ предназначена для поддержания постоянной разности частот гетеродина, выполненного на лампе обратной волны, и магнетрона. Частота магнетрона с течением времени становится нестабильной вследствие изменения окружающей температуры, давления, ухудшения параметров радиоэлементов,
изменения во времени нагрузки магнетрона при сканировании антенны, нестабильности источников питания, а также состояния обтекателя антенны. Частота ЛОВ с течением времени также изменяется. Пределы изменения указанных частот настолько значительны, что фактически промежуточная частота уходит за пределы полосы пропускания УПЧ и прием отраженных сигналов без системы АПЧ оказывается невозможным.
Система АПЧ «следит» за величиной промежуточной частоты и при отклонении ее от номинала вырабатывает такое управляющее напряжение для замедляющей системы ЛОВ, при котором частота колебаний ЛОВ при взаимодействии с частотой колебаний магнетрона обеспечивает получение промежуточной частоты, близкой к номинальной, то есть fразн =fгет -fмагн = 30 МГц.
В схему АПЧ входят: предельный аттенюатор, балансный смеситель АПЧ, УПЧ АПЧ и схема регулирования.
В режиме передачи часть СВЧ энергии через предельный аттенюатор подается на смеситель канала АПЧ, куда также поступает сигнал гетеродина. После преобразования на выходе смесителя образуются импульсы промежуточной частоты, которые усиливаются в УПЧ АПЧ и поступают на различитель ошибки — частотный дискриминатор. Частотный дискриминатор является чувствительным элементом системы АПЧ. На выходе дискриминатора возникают импульсы, полярность и амплитуда которых зависят от стороны и степени отклонения промежуточной частоты от номинального значения. Эти импульсы поступают в схему регулирования, где вырабатывается постоянное напряжение, пропорциональное величине расстройки, которое и поступает на гетеродин (управляющий электрод ЛОВ), перестраивая его по частоте таким образом, чтобы свести к минимуму отклонение промежуточной частоты от номинального значения, тем самым обеспечить заданный коэффициент усиления сигнала линейной УПЧ.
Индикаторный канал выполнен по узловому принципу и представляет собой два отдельных функционально законченных блока ГР430, которые работают параллельно от одного узла развертки, расположенного в блоке ГР452, который, в свою очередь, работает от импульсного вращающегося трансформатора (ВТ) развертки, расположенного в антенном блоке ГР1БМ.
В каждом индикаторном блоке размещены следующие конструктивно законченные функциональные узлы: видеоусилитель-формирователь, электронно-лучевая трубка (ЭЛТ) 14ЛМ1Н, плата питания электродов ЭЛТ, высоковольтный выпрямитель (18 кВ) и отклоняющая система.
В видеоусилителе происходит усиление видеоимпульсов, поступающих с выхода УПЧ, до уровня, необходимого для модуляции электронного луча ЭЛТ. При переключении режимов работы РЛС схема видеоусилителя видоизменяется и амплитудные характеристики оказываются разными.
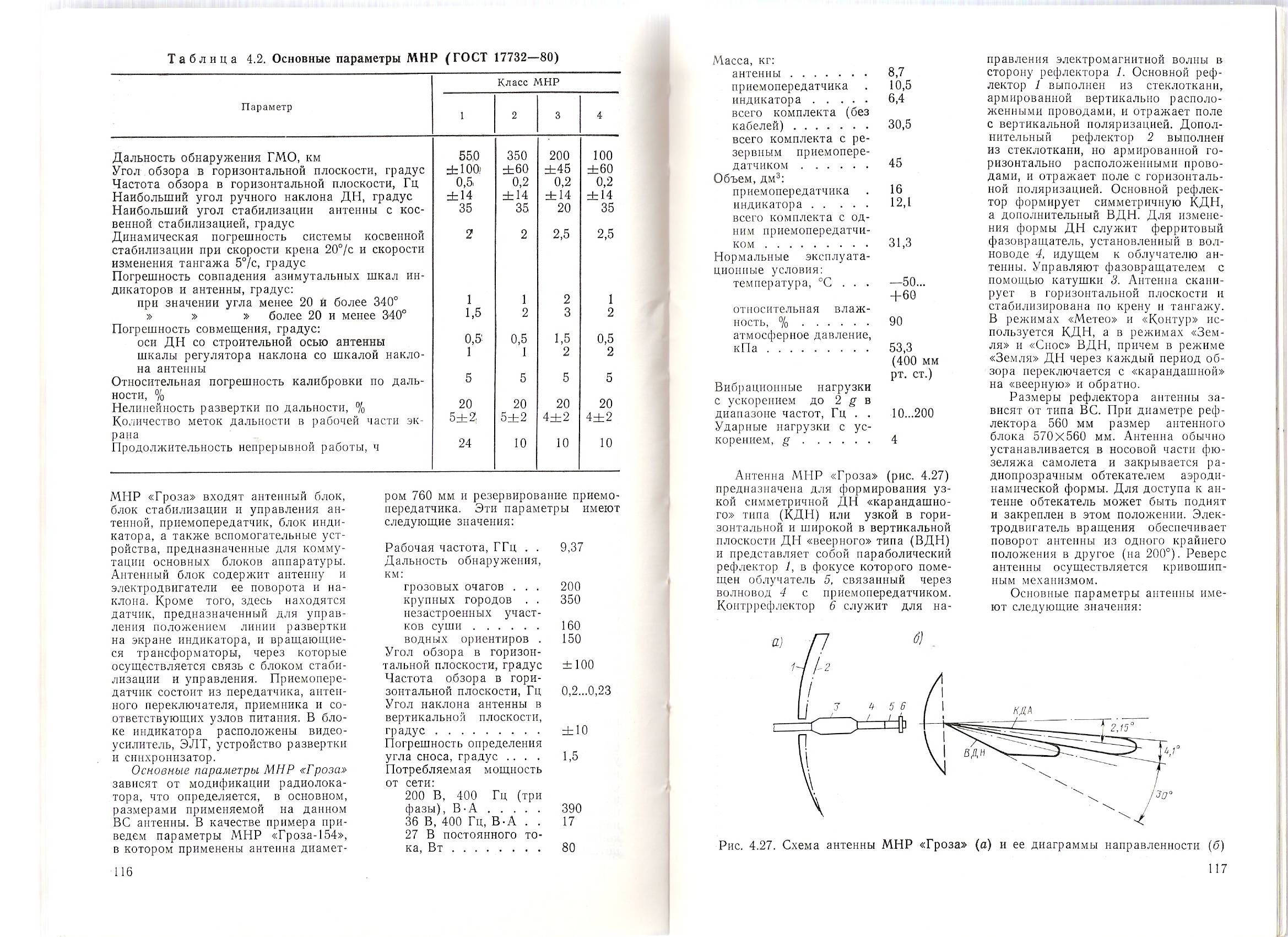
Амплитудные характеристики видеоусилителя в режимах «Земля» (а),
«Контур» (б) и «Метео» (в).
В режиме «Земля» амплитудная характеристика видеоусилителя имеет две ступени. Одна ступень соответствует слабым сигналам, возникающим при отражении от незастроенных участков местности. Эти сигналы образуют на экране ЭЛТ фон местности, на котором выделяются ориентиры. Вторая ступень соответствует сильным сигналам, возникающим при отражении от радиолокационных ориентиров. Эти сигналы выделяются на фоне местности. С помощью регулятора «Контраст», расположенного на передней панели индикатора, изменяется усиление больших по амплитуде сигналов, что позволяет в широких пределах изменять порог выделения цели.
Видеоусилители, имеющие двухступенчатые амплитудные характеристики, называются трехтоновыми, так как они обеспечивают получение на экране индикатора РЛС изображения с тремя световыми тонами: сигнал отсутствует — на экране возникают темные контуры; при слабых сигналах на экране возникает слабосветящийся фон местности; при приеме сильных сигналов на фоне местности появляются яркие отметки, соответствующие радиолокационным ориентирам.
В режиме «Метео», служащем для обнаружения гроз, горных вершин и других препятствий, амплитудная характеристика видеоусилителя линейная и только при приеме очень сильных сигналов происходит их ограничение.
В режиме «Контур», служащем для выделения среди облачности зон, опасных для прохождения самолета, сильные сигналы подавляются. Поэтому при определенном уровне входного сигнала амплитудная характеристика видеоусилителя имеет излом, после которого усиление падает до нуля, и сигналы на выходе видеоусилителя отсутствуют. В этом режиме включается схема ВАРУ приемника, которая обеспечивает постоянство амплитуды принимаемых сигналов при изменении дальности до наблюдаемых объектов.
С выхода видеоусилителей индикаторных блоков видеосигнал, смешанный с калибрационными метками дальности, прямоугольным импульсом подсвета и пилообразным импульсом развертки, вырабатываемые узлом развертки, поступают на ЭЛТ, которая обеспечивает яркостную индикацию видеосигналов в координатах «Азимут—дальность».
Канал синхронизации.
Работа всех каналов РЛС синхронизируется старт-импульсами (синхроимпульсами), которые вырабатываются в специальной обмотке выходного трансформатора импульсного модулятора. Частота повторения синхроимпульсов равна частоте источника питания (400 Гц), длительность порядка 6 мкс, амплитуда б В, полярность отрицательная.
С выхода модулятора старт-импульсы поступают на вход устройства синхронизации блока управления и формирования развертки ГР452, который состоит из следующих функциональных узлов: пульта управления радиолокатором, устройства синхронизации, устройства развертки и платы питания.
Устройство синхронизации предназначено для формирования следующих сигналов:
- импульсов дальности запуска развертки;
- импульсов подсвета линии развертки;
- шкалы калибрационных меток дальности;
- команд управления формой диаграммы направленности антенны в режиме «Земля»;
- импульсов запуска развертки в режиме «Контроль».
Импульсами дальности запускается генератор развертки (генератор линейно изменяющегося тока) и генератор масштабных меток. Генератор развертки нагружен на роторную обмотку импульсного вращающегося трансформатора (ИВТ), расположенного в сканирующей азимутальной плоскости антенны ГР1БМ. В статорных обмотках ИВТ при этом индуктируются линейно нарастающие импульсы тока, амплитуда которых изменяется пропорционально синусу и косинусу текущего азимутального угла, на который повернут ИВТ. Последовательно со статорными обмотками включены отклоняющие катушки ЭЛТ Lx и Ly. Линейно нарастающие импульсы тока создают в совокупности вращающееся магнитное поле, под действием которого на экране ЭЛТ формируется радиально-секторная развертка с плавно изменяемым масштабом. Плавное изменение масштаба осуществляется изменением скорости нарастания тока в роторной обмотке ИВТ за счет изменения напряжения питания схемы развертки при помощи регулятора «Масштаб».
В процессе эксплуатации возникает необходимость в регулировании сдвига центра развертки по горизонтали и вертикали, чтобы точка установки начала развертки совпадала с разметкой на стекле экрана индикатора. Для этого в схеме установки центра развертки применена специальная отклоняющая система, состоящая их двух катушек, которые питаются постоянным током, величина которого регулируется двумя переменными резисторами; R 5 — по горизонтали и R 8 — по вертикали.
Генератор масштабных меток вырабатывает калибрационные 25- и 100-километровые метки дальности в зависимости от масштаба. Первая метка дальности совпадает с моментом излучения зондирующего СВЧ импульса, то есть является нулевым отсчетом дальности.
Для отпирания ЭЛТ на время прямого хода развертки используются импульсы подсвета. Начало импульса подсвета задержано примерно на 10—13 мкс для того, чтобы не создавать засветку экрана индикатора в начале развертки.
Таким образом, в видеоусилители индикаторных блоков поступают калибрационные метки дальности, прямоугольные импульсы подсвета линии развертки и пилообразные импульсы тока развертки и, смешиваясь с видеосигналами, поступают на электронно-лучевые трубки обоих индикаторных блоков РЛС.
Канал управления и стабилизации антенны включает в себя:
- схему коммутации диаграмм направленности;
- систему управления антенной по азимуту и наклону;
- систему гиростабилизации плоскости обзора.
Коммутация диаграмм направленности осуществляется с помощью ферритового вращателя плоскости поляризации и рефлектора антенны двойной кривизны. Ферритовый стержень установлен во фторопластовой втулке круглого волновода облучателя антенны. Снаружи на круглый волновод намотана обмотка электромагнита (соленоид). В результате протекания тока в обмотке соленоида, в том или обратном направлении, изменяется направление магнитного потока, который обеспечивает поворот плоскости поляризации волны.
Рефлектор антенны имеет профиль двойной кривизны и при изменении плоскости поляризации формирует луч двух видов: веерный — при горизонтальной поляризации; игольчатый — при вертикальной поляризации.
Управление вращателем плоскости поляризации осуществляется с пульта управления РЛС, а исполнительным элементом изменения направления тока в катушке соленоида является реле, установленное в блоке ГР720, Использование игольчатой или веерной диаграммы направленности определяется тактическими задачами РЛС и задается с помощью переключателей «Режим» и «Масштаб».
В режиме «Метео» для обзора воздушного пространства включается узкая диаграмма направленности антенны.
В режиме «Земля» на масштабах до 200 км обзор земной поверхности производится веерным лучом, на масштабах от 200 до 300 км в блоке управления и формирования развертки ГР452 включается схема формирования команд, позволяющая производить черестактный обзор земной поверхности веерным и узким лучом. При повороте антенны слева направо включается веерная диаграмма направленности и просматривается ближняя зона обзора, при повороте антенны справа налево включается узкая диаграмма направленности и просматривается дальняя зона об