Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Интересное:
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
ОТЧЕТ
по лабораторной работе №3
по курсу «Системы искусственного интеллекта»
«Программирование нечетких моделей в среде MatLab»
| Выполнили: студенты группы КТбо4-11 Валиковский И.В. Орищенко Т.С. Проверил: ассистент каф. МОП ЭВМ Жиглатый А.А. Оценка ______________________ «____» __________ 2021 г. |
Оглавление
Цель работы... 3
Задание. 3
Суть задания.. 3
Описание варианта. 3
Теоретическая часть. 4
Основные сведения о нечеткой логике. 4
Определение. 4
Нечеткое множество.. 5
Нечеткое высказывание. 6
Операции над нечеткими высказываниями.. 6
Нечеткие переменные. 6
Пакет MatlabFuzzyLogicToolbox. 7
Предоставляемые возможности.. 7
Схемы вывода. 7
Этапы проектирования системы... 7
Выполнение. 9
Модель регулирования температуры в помещении.. 9
Описание модели.. 9
Создание модели.. 9
Создание модели с выводом по Суджено.. 14
Модель оценки уровня опасности движущегося автомобиля.. 14
Описание модели.. 14
Создание модели.. 15
Создание модели с выводом по Суджено.. 17
Модель управления светофором.. 17
Описание модели.. 17
Создание модели.. 17
Создание модели с выводом по Суджено.. 19
Вывод.. 20
Приложение A.. 21
Приложение B.. 23
Приложение C.. 25
Цель работы
Целью работы является программирование нечеткой интеллектуальной модели управления средствами инструментария нечеткой логики в интерактивной среде MatLab.
Задание
Суть задания
Сущность задания лабораторной работы состоит в том, чтобы с помощью инструментария нечеткой логики интерактивной системы MatLab реализовать нечеткую систему управления. Для этого необходимо построить базу знаний, описывающую объект управления, произвести ее отладку, проверку работоспособности на выбранном варианте задания, проанализировать результаты, подготовить и защитить отчет.
|
|
Этапы выполнения лабораторной работы:
· изучить теоретический материал, рассмотреть примеры;
· четко представить себе, что необходимо сделать согласно своему варианту;
· описать выбранный объект управления в термах нечеткой логики;
· реализовать с помощью инструментария нечеткой логики интерактивной системы для технических расчетов MatLab нечеткую систему управления, моделирующую заданную ситуацию;
· реализовать в построенной базе знаний нечеткий логический вывод по Мамдани и Суджено при заданных значениях входных признаков, описывающих объект управления и сравнить полученные результаты;
· представить отчет о работе, включающий авторские выводы и оценку достижения поставленных целей.
Описание варианта
Вариант №4
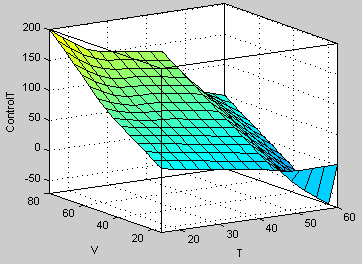
Модель регулирования температуры в помещении:
· объект управления – регулятор температуры;
· цель управления – обеспечение комфортной температуры в помещении;
· признаками оценки ситуации являются
o температура воздуха в помещении (T),
o скорость изменения температуры в помещении (TS),
o объем помещения (V);
Управление состоит в изменении температуры воздуха (ControlT);
Диапазоны четких значений и наборы термов признаков и управляющего воздействия:
| Параметр | Диапазон | Набор термов |
| T(C0) | 15–60 | «малая», «небольшая», «средняя», «высокая» |
| TS(C/min) | 0–40 | «малая», «средняя», «высокая», «очень высокая» |
| V(m3) | 15–80 | «малая», «небольшая», «средняя», «высокая» |
| ControlT | -3 – 3 | «малое», «среднее», «довольно большое» |
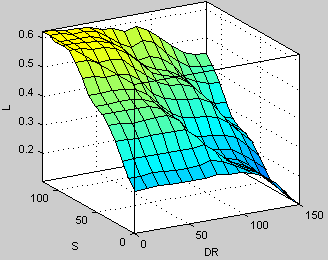
2. Модель оценки уровня опасности движущегося автомобиля:
· объект оценки − движущийся по автодороге легковой автомобиль;
· цель управления − обеспечение безопасности движения. В случае повышения уровня опасности движения система должна сигнализировать водителю о возможности возникновения аварийной ситуации на дороге;
· признаками оценки ситуации являются:
|
|
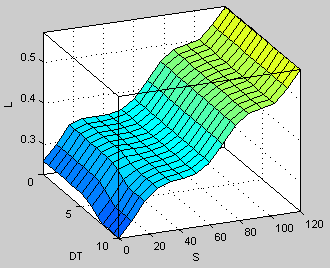
o скорость движения автомобиля (S),
o расстояние до находящего впереди препятствия (DR),
o расстояние до правой обочины (DT);
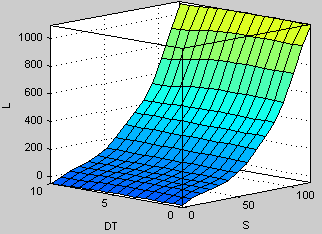
Оценивается уровень опасности (L);
Диапазоны четких значений, наборы термов признаков и самой оценки:
| Параметр | Диапазон | Набор термов |
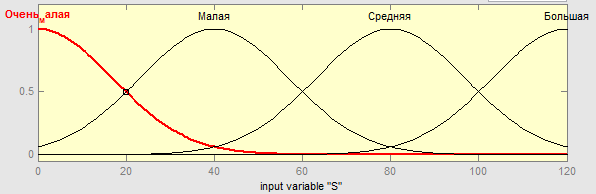
| S(km/h) | 0 – 120 | «очень малая», «малая», «средняя», «большая» |
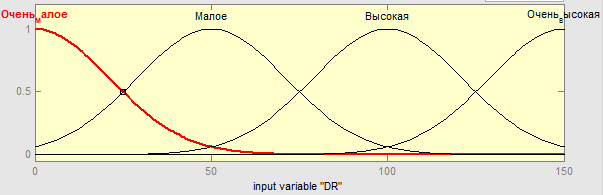
| DR(m) | 0 – 150 | «очень малое», «малое», «высокая», «очень высокая» |
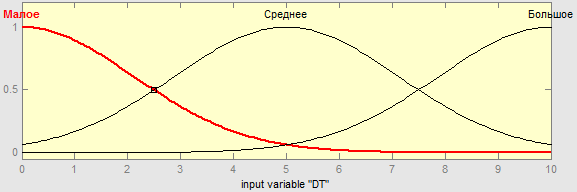
| DT(m) | 0 – 10 | «малое», «небольшое», «большое» |
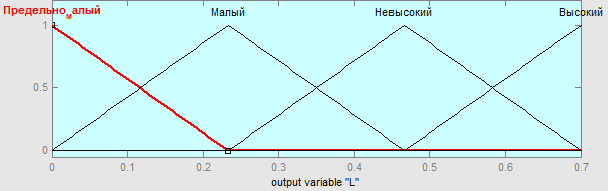
| L(ед) | 0 – 0,7 | «предельно малый», «малый», «невысокий», «высокий» |
Теоретическая часть
Основные сведения о нечеткой логике
Определение
Для решения слабоструктурированных задач, в которых имеет место неопределенность субъективной природы Л. Заде предложил использовать нечеткую логику.
Нечеткая логика – это раздел математики, базирующийся на понятии нечеткого множества, когда степень принадлежности элемента нечеткому множеству может принимать любые значения в интервале [0, 1], а не только значения 0 или 1
Нечеткая логика успешно моделирует частичную определенность. Например, нечеткие модели уже обеспечили себе коммерческий успех в самых разных приложениях: системы управления (от бытовой техники до автомобильных АБС-систем), автофокусирование видеокамер, фотоаппаратов и т.п. Они позволяют программам работать в диапазоне (0, 1) различных степеней истины. Их преимущества проявляются, когда система анализируется с помощью нечетких лингвистических переменных (низкий, высокий и т.п.). Нечеткая логика имеет свою аксиоматику и набор базовых операторов, действующих несколько иначе, чем аналогичные булевы операторы. Поскольку человеческая логика сама по себе является приблизительной, то и нечеткая логика имеет огромное значение при создании программного обеспечения, где вместо детермированных алгоритмов применяются экспертные знания.
Нечеткое множество
Нечетким множеством  называется множество, определенное на произвольном непустом множестве Х как множество пар вида:
называется множество, определенное на произвольном непустом множестве Х как множество пар вида:

где:
· 
· 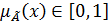
Множество Xназывается базовым множеством. Функция  называется функцией принадлежности множества , она указывает на степень принадлежности элемента x нечеткому множеству . Вид функции принадлежности определяется субъективно или экспертно. С возрастанием их числа и области неопределенности у эксперта могут возникнуть серьезные затруднения в процессе представления своих эвристических знаний в абстрактной форме. Поэтому на практике применяется иной подход. Он состоит в том, что после установки нечетких множеств, для характеристики взаимосвязей входных и выходных величин управления применяются те или иные простые формы фазирования функции принадлежности, как линейные (треугольники или трапеции), так и нелинейные (колокол). Примерный вид этих форм представлен в виде функций принадлежности
называется функцией принадлежности множества , она указывает на степень принадлежности элемента x нечеткому множеству . Вид функции принадлежности определяется субъективно или экспертно. С возрастанием их числа и области неопределенности у эксперта могут возникнуть серьезные затруднения в процессе представления своих эвристических знаний в абстрактной форме. Поэтому на практике применяется иной подход. Он состоит в том, что после установки нечетких множеств, для характеристики взаимосвязей входных и выходных величин управления применяются те или иные простые формы фазирования функции принадлежности, как линейные (треугольники или трапеции), так и нелинейные (колокол). Примерный вид этих форм представлен в виде функций принадлежности  на нечетком множестве элементов из базового множества X:
на нечетком множестве элементов из базового множества X:
|
|
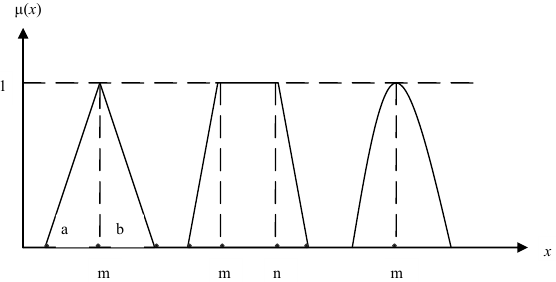
Рисунок 1 Формы функции принадлежности
Нечеткое высказывание
Нечеткая логика позволяет представлять ситуации, которые оперируют нечеткими понятиями, или, когда нет уверенности в самих фактах, описывающих ситуацию.
Высказывание  называется нечетким высказыванием, если допускается, что может быть одновременно истинным и ложным.
называется нечетким высказыванием, если допускается, что может быть одновременно истинным и ложным.
Любое оценочное суждение, основанное на неполных или недостоверных данных, является нечетким и сопровождается обычно выражением степени уверенности (или сомнения) в его истинности. Мера истинности нечеткого высказывания Ẽ также определяется функцией
принадлежности, задаваемой обычно на множестве Х= {true, false}.
Нечеткие высказывания, характеризующиеся равной степенью уверенности и сомнения (0,5), называют нечетко-индифферентными.
Нечеткие переменные
Согласно Заде, нечеткое высказывание, степень истинности которого может принимать произвольное значение из интервала [0,1], называется нечеткой логической переменной. Нечеткие логические формулы можно получить на основе операций над нечеткими
логическими переменными и их значениями из интервала [0,1], т.е. понятие нечеткой логической формулы можно ввести индуктивно.
Нечеткой логической формулой называется:
а) нечеткая логическая переменная или константа из интервала [0,1];
б) всякое выражение, построенное из нечетких логических формул применением любого конечного числа логических операций;
в) те и только те выражения, которые построены согласно пунктам а) и б).
Составные нечеткие высказывания являются нечеткими логическим формулами, если входящие в них простые нечеткие высказывания рассматривать как нечеткие логические (лингвистические) переменные.
|
|
Таким образом, при решении практических задач с использованием нечетких моделей объектов необходимо определить перечень признаков,характеризующих объект, диапазоны значений каждого признака, их значимость в общейоценке объекта, а также перечень значений используемых лингвистических переменных.
Предоставляемые возможности
Пакет предоставляет следующие возможности:
· определениепеременных,нечеткихправилифункций принадлежности;
· интерактивный просмотр нечеткого логического вывода;
· гибридныеметодыадаптивногонечеткоговыводас использованием нейронных сетей и нечеткой кластеризации;
· интерактивное динамическое моделирование в Simulink;
· генерация переносимого Си-кода с помощью приложения Real-TimeWorkshop.
Схемы вывода
Одной из основных задач лабораторной работы является изучение различныхсхем выводана базенечеткихправил.ПакетFuzzyLogicпозволяет строить нечеткие системы со схемами вывода по Мамдани и Суджено.
В системах с выводом по Мамдани база знаний состоит из правил вида«Еслиx1=низкийиx2=средний,тоy=высокий».
Всистемахс выводомпоСудженобазазнанийсостоитизправилвида«Если x1=низкий и x2=средний, то y=a0+a1x1+a2x2», где a0 – константа, a1, a2–весовыекоэффициенты,определяющиестепеньвлияниявходных переменныхназначениевыходнойпеременной.Такимобразом, основноеотличиемеждувыводамипоМамданииСуджено заключается в способе определения значений выходной переменной в правилах, образующих базу знаний.
Значениявыходнойпеременной привыводепоМамданизадаютсянечеткимитермами,всистемах вывода по Суджено – как линейная комбинация входных переменных.
Выполнение
Описание модели
· объект управления – регулятор температуры;
· цель управления – обеспечение комфортной температуры в помещении;
· признаками оценки ситуации являются
o температура воздуха в помещении (T),
o скорость изменения температуры в помещении (TS),
o объем помещения (V);
Управление состоит в изменении температуры воздуха (ControlT);
Диапазоны четких значений и наборы термов признаков и управляющего воздействия:
| Параметр | Диапазон | Набор термов |
| T(C0) | 15–60 | «малая», «небольшая», «средняя», «высокая» |
| TS(C/min) | 0 – 40 | «малая», «средняя», «высокая», «очень высокая» |
| V(m3) | 15 – 80 | «малая», «небольшая», «средняя», «высокая» |
| ControlT | -3 – 3 | «малое», «среднее», «довольно большое» |
Создание модели
Вызов главного окна
Для создания системы необходимо запустить редактор нечеткого вывода (РНВ) командойfuzzy:
>>fuzzy
|
|
Эта команда откроет главное окно, окно РНВ:
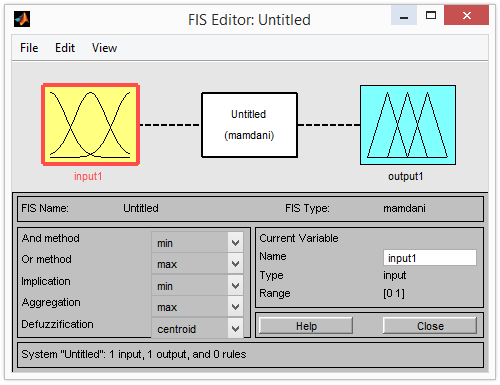
Рисунок 2Редактор нечеткого вывода
Добавление параметров
В данной ситуации необходимо определить 3 входных параметра и один выходной. По умолчанию создаются два параметра: один входной и один выходной. Для редактирования параметра необходимо выделить его щелчком мыши и определить необходимые свойства. Для добавления нового параметра необходимо выполнить команду «Edit à AddVariable à { Input | Output}»:
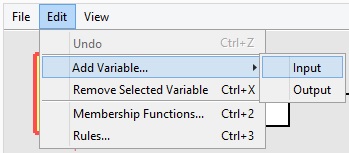
Рисунок 3 Добавление параметра
Новый параметр появится в главном окне и будет доступен для редактирования.
Определение правил вывода
Правила вывода настраиваются в окне редактора правил вывода. Чтобы его вызвать необходимо выполнить команду меню «Edit à Rules» (Рисунок 3). Основное окно редактора правил вывода:
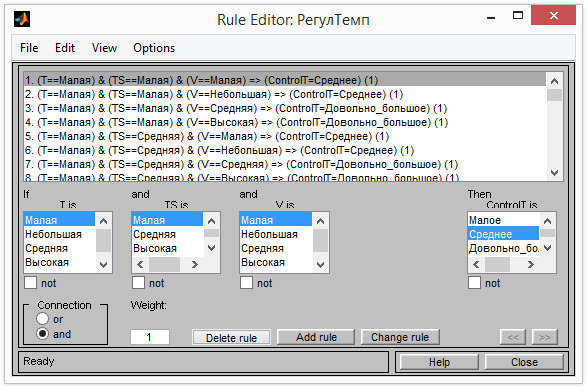
Рисунок 5 Окно редактора правил вывода
В данном окне производится управление правилами вывода. Правила добавляются и удаляются соответствующими кнопками снизу. Формат отображения правил можно выбрать в меню «Options à Format»:
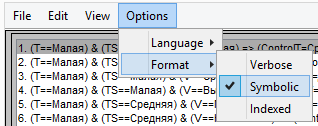
Рисунок 6 Выбор формата отображения правил
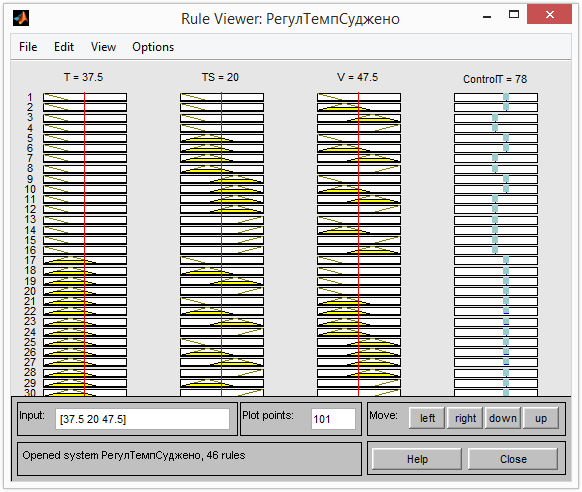
Важно отметить, что правила создаются путем субъективного восприятия обстановки согласно здравому смыслу, что и является основным преимуществом нечеткой логики. Для системы, моделирующей регулирование температуры в помещении было определено всего 46 правил, полученных перебором значений каждого параметра с каждым (в индексном формате):
| 1 1 1, 2 (1): 1 | 1 3 4, 3 (1): 1 | 2 3 2, 2 (1): 1 | 3 3 2, 2 (1): 1 | 4 3 3, 1 (1): 1 |
| 1 1 2, 2 (1): 1 | 1 4 1, 3 (1): 1 | 2 4 2, 2 (1): 1 | 3 3 3, 2 (1): 1 | 4 2 3, 1 (1): 1 |
| 1 1 3, 3 (1): 1 | 1 4 2, 3 (1): 1 | 2 1 3, 2 (1): 1 | 3 4 4, 1 (1): 1 | |
| 1 1 4, 3 (1): 1 | 1 4 4, 3 (1): 1 | 2 2 3, 2 (1): 1 | 4 1 1, 1 (1): 1 | |
| 1 2 1, 2 (1): 1 | 1 4 3, 3 (1): 1 | 2 3 3, 2 (1): 1 | 4 1 3, 1 (1): 1 | |
| 1 2 2, 2 (1): 1 | 2 1 1, 2 (1): 1 | 2 4 3, 2 (1): 1 | 4 1 4, 1 (1): 1 | |
| 1 2 3, 3 (1): 1 | 2 2 1, 2 (1): 1 | 2 2 4, 2 (1): 1 | 4 3 4, 1 (1): 1 | |
| 1 2 4, 3 (1): 1 | 2 3 1, 2 (1): 1 | 2 4 4, 2 (1): 1 | 4 4 4, 1 (1): 1 | |
| 1 3 1, 2 (1): 1 | 2 4 1, 2 (1): 1 | 3 1 4, 2 (1): 1 | 4 4 2, 1 (1): 1 | |
| 1 3 2, 2 (1): 1 | 2 1 2, 2 (1): 1 | 3 1 1, 2 (1): 1 | 4 2 2, 1 (1): 1 | |
| 1 3 3, 3 (1): 1 | 2 2 2, 2 (1): 1 | 3 1 2, 2 (1): 1 | 4 3 2, 1 (1): 1 |
После определения правил можно считать процесс создания модели завершенным. Теперь ее можно сохранить и просматривать результаты в окнах просмотра правил и поверхности вывода.
Характеристика
ControlT
Диапазон
Функция принадлежности
Параметры ФП
Результаты выполнения модели с выводом по Суджено представлены в Приложении A
Описание модели
· объект оценки − движущийся по автодороге легковой автомобиль;
· цель управления − обеспечение безопасности движения. В случае повышения уровня опасности движения система должна сигнализировать водителю о возможности возникновения аварийной ситуации на дороге;
· признаками оценки ситуации являются:
o скорость движения автомобиля (S),
o расстояние до находящего впереди препятствия (DR),
o расстояние до правой обочины (DT);
Оценивается уровень опасности (L);
Диапазоны четких значений, наборы термов признаков и самой оценки:
| Параметр | Диапазон | Набор термов |
| S(km/h) | 0 – 120 | «очень малая», «малая», «средняя», «большая» |
| DR(m) | 0 – 150 | «очень малое», «малое», «высокая», «очень высокая» |
| DT(m) | 0 – 10 | «малое», «небольшое», «большое» |
| L(ед) | 0 – 0,7 | «предельно малый», «малый», «невысокий», «высокий» |
Создание модели
Пошаговое создание модели было рассмотрено на примере создания модели регулирования температуры в помещении. Создание данной модели производится аналогичным образом, но с другими параметрами:
Определение параметров
| Параметр |
Характеристика | Значение | ||||
| S | Диапазон | [0 120] | ||||
| Функция принадлежности | gaussmf | |||||
| Параметры ФП | Очень малая | [16.99 0] | ||||
| Малая | [16.99 40] | |||||
| Средняя | [16.99 80] | |||||
| Большая | [16.99 120] | |||||
|
| ||||||
| DR | Диапазон | [0 150] | ||||
| Функция принадлежности | gaussmf | |||||
| Параметры ФП | Очень малое | [21.23 -4.441e-016] | ||||
| Малое | [21.23 50] | |||||
| Высокое | [21.23 100] | |||||
| Очень высокое | [21.23 150] | |||||
|
| ||||||
| DT | Диапазон | [0 10] | ||||
| Функция принадлежности | gaussmf | |||||
| Параметры ФП | Малое | [2.123 0] | ||||
| Среднее | [2.123 5] | |||||
| Большое | [2.123 10] | |||||
|
| ||||||
| L | Диапазон | [0 0.7] | ||||
| Функция принадлежности | trimf | |||||
| Параметры ФП | Предельно малый | [-0.2333 5.204e-018 0.2333] | ||||
| Малый | [-0.2333 5.204e-018 0.2333] | |||||
| Невысокий | [0.2333 0.4667 0.7] | |||||
| Высокий | [0.4667 0.7 0.9333] | |||||
|
| ||||||
Определение правил
Правила в индексном формате имеют вид:
| 4 1 1, 4 (1): 1 | 2 3 1, 2 (1): 1 | 4 2 2, 4 (1): 1 | 2 4 2, 1 (1): 1 | 3 3 3, 3 (1): 1 |
| 3 1 1, 4 (1): 1 | 1 3 1, 2 (1): 1 | 3 2 2, 4 (1): 1 | 1 4 2, 1 (1): 1 | 2 3 3, 2 (1): 1 |
| 2 1 1, 3 (1): 1 | 4 4 1, 4 (1): 1 | 2 2 2, 3 (1): 1 | 4 1 3, 4 (1): 1 | 1 3 3, 1 (1): 1 |
| 1 1 1, 2 (1): 1 | 3 4 1, 3 (1): 1 | 1 2 2, 2 (1): 1 | 3 1 3, 4 (1): 1 | 4 4 3, 3 (1): 1 |
| 4 2 1, 4 (1): 1 | 2 4 1, 2 (1): 1 | 4 3 2, 4 (1): 1 | 2 1 3, 3 (1): 1 | 3 4 3, 2 (1): 1 |
| 3 2 1, 4 (1): 1 | 1 4 1, 1 (1): 1 | 3 3 2, 3 (1): 1 | 1 1 3, 2 (1): 1 | 2 4 3, 1 (1): 1 |
| 2 2 1, 3 (1): 1 | 4 1 2, 4 (1): 1 | 2 3 2, 2 (1): 1 | 4 2 3, 4 (1): 1 | 1 4 3, 1 (1): 1 |
| 1 2 1, 2 (1): 1 | 3 1 2, 4 (1): 1 | 1 3 2, 2 (1): 1 | 3 2 3, 4 (1): 1 | |
| 4 3 1, 4 (1): 1 | 2 1 2, 3 (1): 1 | 4 4 2, 3 (1): 1 | 2 2 3, 3 (1): 1 | |
| 3 3 1, 3 (1): 1 | 1 1 2, 2 (1): 1 | 3 4 2, 2 (1): 1 | 1 2 3, 2 (1): 1 |
Характеристика
L
Диапазон
Функция принадлежности
Параметры ФП
Результаты выполнения модели с выводом по Суджено представлены в Приложении B.
Описание модели
· объект управления − светофор;
· цель управления − обеспечить переключение светофора в зависимости от ситуации, наблюдаемой на перекрестке. Управление светофором осуществляется при помощи решений:
o «открыть движение» (зеленый цвет),
o «не открывать движение» (красный цвет);
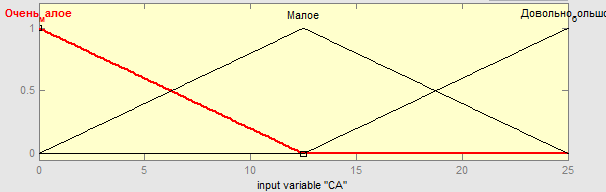
· признаками оценки ситуации являются количество:
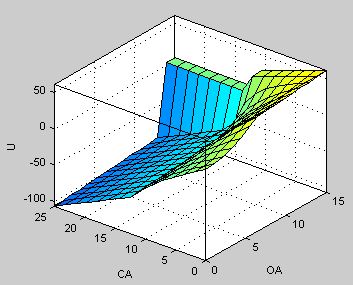
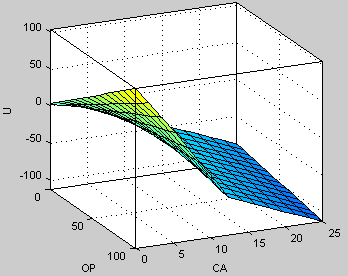
o автомобилей на закрытом направлении (СА),
o автомобилей на открытом направлении (ОА),
o пешеходов на закрытом (СР) и на открытом направлениях (ОР);
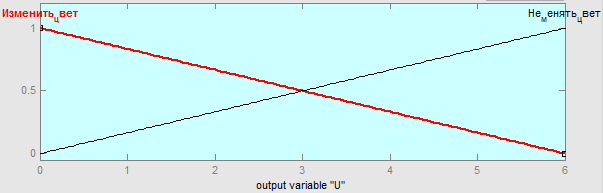
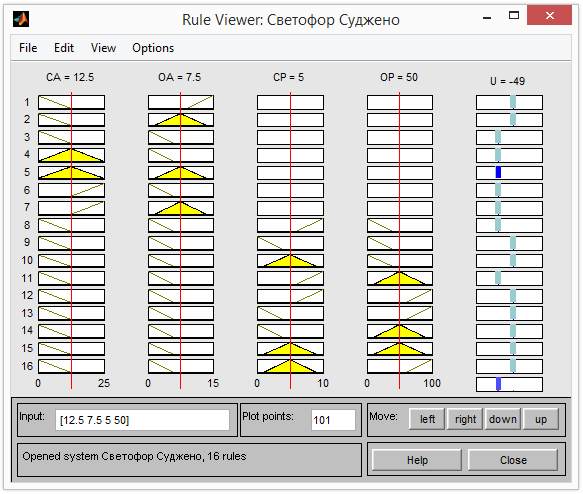
Управление состоит в переключении светофора (U);
Диапазоны четких значений и наборы термов признаков и управляющего воздействия:
| Параметр | Диапазон | Набор термов |
| CA(шт) | 0 –25 | «очень малое», «малое», «довольно большое» |
| OA(шт) | 0 – 15 | «предельно малое», «малое», «большое» |
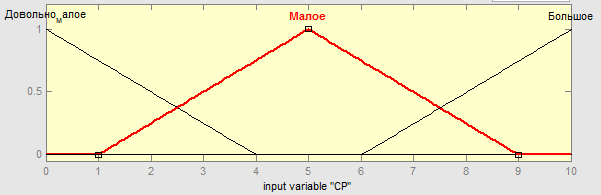
| CP(шт) | 0 – 10 | «довольно малое», «малое», «большое» |
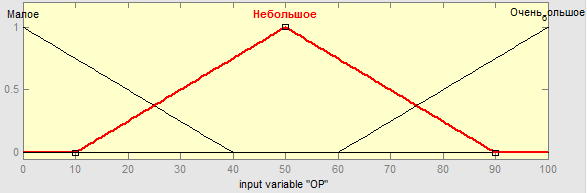
| OP(шт) | 0 – 100 | «малое», «небольшое», «очень большое» |
| U(ед) | 0 – 6 | «изменить цвет», «не менять цвет» |
Создание модели
Определение параметров
| Параметр |
Характеристика | Значение | ||||
| CA | Диапазон | [0 25] | ||||
| Функция принадлежности | trimf | |||||
| Параметры ФП | Очень малое | [-12.5 -1.11e-016 12.5] | ||||
| Малое | [-12.5 -1.11e-016 12.5] | |||||
| Довольно большое | [12.5 25 37.5] | |||||
|
| ||||||
| OA | Диапазон | [0 15] | ||||
| Функция принадлежности | trimf | |||||
| Параметры ФП | Предельно малое | [-6 0 6] | ||||
| Малое | [1.5 7.5 13.5] | |||||
| Большое | [9 15 21] | |||||
|
| ||||||
| CP | Диапазон | [0 10] | ||||
| Функция принадлежности | trimf | |||||
| Параметры ФП | Довольно малое | [-4 0 4] | ||||
| Малое | [1 5 9] | |||||
| Большое | [6.02 10 14] | |||||
|
| ||||||
| OP | Диапазон | [0 100] | ||||
| Функция принадлежности | trimf | |||||
| Параметры ФП | Малое | [-40 0 40] | ||||
| Небольшое | [10 50 90] | |||||
| Очень большое | [60 100 140] | |||||
|
| ||||||
| U | Диапазон | [0 6] | ||||
| Функция принадлежности | trimf | |||||
| Параметры ФП | Изменить цвет | [-6 0 6] | ||||
| Не менять цвет | [0 6 12] | |||||
|
| ||||||
Определение правил
Правила в индексном формате имеют вид:
| 1 3 0 0, 2 (1): 1 | 1 1 1 1, 2 (1): 1 |
| 1 2 0 0, 2 (1): 1 | 1 1 2 1, 2 (1): 1 |
| 1 1 0 0, 1 (1): 1 | 1 1 3 2, 1 (1): 1 |
| 2 1 0 0, 1 (1): 1 | 1 1 3 3, 2 (1): 1 |
| 2 2 0 0, 1 (1): 1 | 1 1 1 3, 2 (1): 1 |
| 3 1 0 0, 1 (1): 1 | 1 1 1 2, 2 (1): 1 |
| 3 2 0 0, 1 (1): 1 | 1 1 2 2, 2 (1): 1 |
| 1 1 3 1, 1 (1): 1 | 1 1 2 3, 2 (1): 1 |
Характеристика
U
Диапазон
Функция принадлежности
Параметры ФП
Результаты выполнения модели с выводом по Суджено представлены в Приложении C.
Вывод
В процессе выполнения данной лабораторной работы мы изучили основные принципы создания нечетких индивидуальных моделей. Создали модели различных систем, определили их параметры и правила и произвели анализ поведения данных систем.
Приложение A
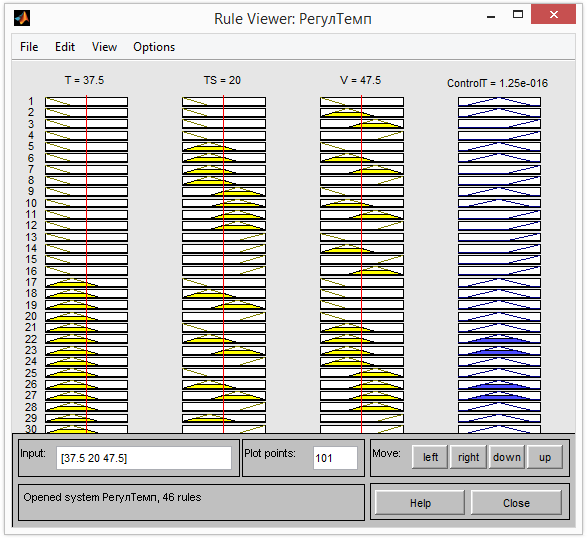
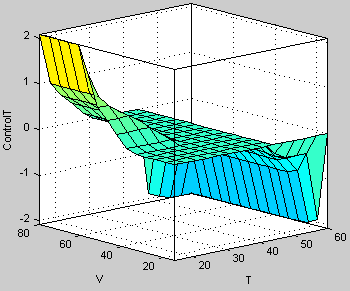
Результаты работы модели регулирования температуры в помещении:
· Вывод по Мамдани

· Вывод по Суджено

·
Приложение B
Результаты работы модели оценки уровня опасности движущегося автомобиля:
· Вывод по Мамдани

· Вывод по Суджено


Приложение C
Результаты работы модели управления светофором:
· Вывод по Мамдани

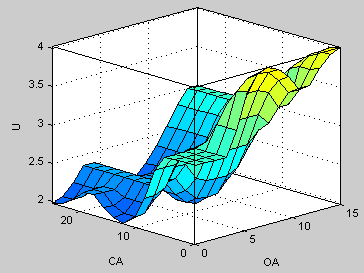
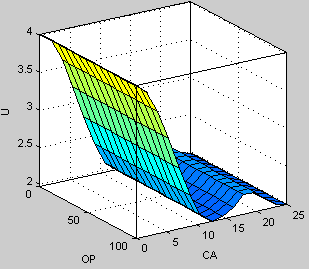
· Вывод по Суджено
ОТЧЕТ
по лабораторной работе №3
по курсу «Системы искусственного интеллекта»
«Программирование нечетких моделей в среде MatLab»
| Выполнили: студенты группы КТбо4-11 Валиковский И.В. Орищенко Т.С. Проверил: ассистент каф. МОП ЭВМ Жиглатый А.А. Оценка ______________________ «____» __________ 2021 г. |
Оглавление
Цель работы... 3
Задание. 3
Суть задания.. 3
Описание варианта. 3
Теоретическая часть. 4
Основные сведения о нечеткой логике. 4
Определение. 4
Нечеткое множество.. 5
Нечеткое высказывание. 6
Операции над нечеткими высказываниями.. 6
Нечеткие переменные. 6
Пакет MatlabFuzzyLogicToolbox. 7
Предоставляемые возможности.. 7
Схемы вывода. 7
Этапы проектирования системы... 7
Выполнение. 9
Модель регулирования температуры в помещении.. 9
Описание модели.. 9
Создание модели.. 9
Создание модели с выводом по Суджено.. 14
Модель оценки уровня опасности движущегося автомобиля.. 14
Описание модели.. 14
Создание модели.. 15
Создание модели с выводом по Суджено.. 17
Модель управления светофором.. 17
Описание модели.. 17
Создание модели.. 17
Создание модели с выводом по Суджено.. 19
Вывод.. 20
Приложение A.. 21
Приложение B.. 23
Приложение C.. 25
Цель работы
Целью работы является программирование нечеткой интеллектуальной модели управления средствами инструментария нечеткой логики в интерактивной среде MatLab.
Задание
Суть задания
Сущность задания лабораторной работы состоит в том, чтобы с помощью инструментария нечеткой логики интерактивной системы MatLab реализовать нечеткую систему управления. Для этого необходимо построить базу знаний, описывающую объект управления, произвести ее отладку, проверку работоспособности на выбранном варианте задания, проанализировать результаты, подготовить и защитить отчет.
Этапы выполнения лабораторной работы:
· изучить теоретический материал, рассмотреть примеры;
· четко представить себе, что необходимо сделать согласно своему варианту;
· описать выбранный объект управления в термах нечеткой логики;
· реализовать с помощью инструментария нечеткой логики интерактивной системы для технических расчетов MatLab нечеткую систему управления, моделирующую заданную ситуацию;
· реализовать в построенной базе знаний нечеткий логический вывод по Мамдани и Суджено при заданных значениях входных признаков, описывающих объект управления и сравнить полученные результаты;
· представить отчет о работе, включающий авторские выводы и оценку достижения поставленных целей.
Описание варианта
Вариант №4
Модель регулирования температуры в помещении:
· объект управления – регулятор температуры;
· цель управления – обеспечение комфортной температуры в помещении;
· признаками оценки ситуации являются
o температура воздуха в помещении (T),
o скорость изменения температуры в помещении (TS),
o объем помещения (V);
Управление состоит в изменении температуры воздуха (ControlT);
Диапазоны четких значений и наборы термов признаков и управляющего воздействия:
| Параметр | Диапазон | Набор термов |
| T(C0) | 15–60 | «малая», «небольшая», «средняя», «высокая» |
| TS(C/min) | 0–40 | «малая», «средняя», «высокая», «очень высокая» |
| V(m3) | 15–80 | «малая», «небольшая», «средняя», «высокая» |
| ControlT | -3 – 3 | «малое», «среднее», «довольно большое» |
2. Модель оценки уровня опасности движущегося автомобиля:
· объект оценки − движущийся по автодороге легковой автомобиль;
· цель управления − обеспечение безопасности движения. В случае повышения уровня опасности движения система должна сигнализировать водителю о возможности возникновения аварийной ситуации на дороге;
· признаками оценки ситуации являются:
o скорость движения автомобиля (S),
o расстояние до находящего впереди препятствия (DR),
o расстояние до правой обочины (DT);
Оценивается уровень опасности (L);
Диапазоны четких значений, наборы термов признаков и самой оценки:
| Параметр | Диапазон | Набор термов |
| S(km/h) | 0 – 120 | «очень малая», «малая», «средняя», «большая» |
| DR(m) | 0 – 150 | «очень малое», «малое», «высокая», «очень высокая» |
| DT(m) | 0 – 10 | «малое», «небольшое», «большое» |
| L(ед) | 0 – 0,7 | «предельно малый», «малый», «невысокий», «высокий» |
|
|
|

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!