Под магистральной связью понимают прямую (без ретрансляций) одностороннюю или двустороннюю дальнюю связь между отдельными корреспондентами. Наиболее характерными особенностями магистральных линий связи является их большая протяженность (до десятков тысяч километров), высокие требования к достоверности передачи информации и достаточно большой ее объем.
Для магистральной связи используется диапазон частот от 3 до 30 МГц. Применяются различные виды модуляции, обеспечивающие телефонный или телеграфный режим работы. Из многочисленных применяемых режимов назовем следующие: А1 – телеграфия при амплитудной манипуляции, А3 – телефония при амплитудной модуляции, F1 – телеграфия при угловой частотной (или фазовой) манипуляции, F3 – телефония при частотной модуляции. Кроме упомянутых выше двухполосных сигналов, широко применяются однополосные, в том числе с ослабленной или подавленной несущей. При излучениях типов A1, A3, F1, F3 используют слуховой прием сигналов на одну или две пары телефонов, а также на громкоговоритель. Телеграфные сигналы часто регистрируются непосредственно на телеграфный аппарат.
Выделяют три основных класса магистральных радиоприемных устройств. К первому классу относятся адаптивные приемники, реализующие предельно достижимые на данном уровне развития радиотехники параметры. Они могут иметь большие габариты, высокую стоимость, потреблять значительную мощность от источников питания, обслуживаться достаточно квалифицированным персоналом.
Ко второму классу относятся приемники с плавной или дискретной установкой частоты, имеющие нестабильность частоты приема не более 5·10-5 и высокие, но не предельные электрические показатели.
Третий класс – это приемники с плавной установкой частоты (с нестабильностью порядка 5·10-4), имеющие только слуховые виды работы, местное (ручное или автоматическое) управление, обладающие высокой надежностью и экономичностью, малыми габаритами и весом. Допускается незначительное ухудшение второстепенных электрических параметров по сравнению со вторым классом.
Пороговая чувствительность магистральных приемников в единицах кТ 0 составляет 7…13 дБ (коэффициент шума: 5…20). Ослабление побочных каналов приема достигает 80…120 дБ. Двухсигнальная избирательность нормируется на уровне 60…100 дБ. Для расширения динамического диапазона используются ручная и автоматическая регулировки усиления, имеющие глубину регулировки соответственно 55…80 (ручная) и 55…115 (автоматическая) децибел.
В главном тракте приема используется двукратное или трехкратное преобразование частоты, что позволяет реализовать высокую селективность как по прямому, так и по зеркальному каналам приема. Первая промежуточная частота выбирается выше наибольшей частоты рабочего диапазона (35…50 МГц). В результате зеркальный канал оказывается далеко за пределами настройки приемника и достигается значительное (до 100 дБ) ослабление помеховых каналов приёма. Основная селекция осуществляется уже в тракте первой промежуточной частоты приемника за счет применения кварцевых либо монолитных фильтров сосредоточенной селекции. При выборе второй промежуточной частоты руководствуются соображениями обеспечения избирательности по соседнему и второму зеркальному каналам приема, а также согласования ширины спектра сигнала и полосы пропускания УПЧ. Значения второй промежуточной частоты в профессиональных приемниках варьируется от 0,2 до 1,6 МГц.
Перекрытие диапазона частот обеспечивается перестройкой одного (первого) гетеродина, при этом промежуточные частоты являются фиксированными. Однако возможны варианты с изменением частоты двух и более гетеродинов, а также с переменным значением первой промежуточной частоты.
Для примера рассмотрим вариант типовой структурной схемы профессионального приемника коротковолнового диапазона – рис. 2.2.
Рис. 2.2. Вариант структурной схемы профессионального коротковолнового приемника
Сигнал от антенны проходит через фильтр Z1 входной цепи, аттенюатор R и усилитель А1, после чего поступает на первый смеситель V1. Фильтр Z1 обычно представляет собой неперестраиваемую систему контуров, с помощью которой осуществляется предварительная селекция сигналов в пределах выбранного диапазона волн. Полоса пропускания фильтра равна ширине поддиапазона. При смене поддиапазона меняется фильтр.
Высокочастотный аттенюатор R может иметь ручное или автоматическое управление. Его целесообразно выполнить на p-i-n диодах, имеющих очень малое сопротивление в открытом состоянии. Благодаря этому для слабых сигналов коэффициент передачи аттенюатора имеет значение близкое к единице.
Усилитель А1 должен удовлетворять требованиям высокой линейности и малого коэффициента шума. В рассматриваемой схеме это широкополосный неперестраиваемый усилитель.
Первое преобразование частоты осуществляется «вверх». Ориентируясь на международную регламентацию диапазона КВ (5…30 МГц), значение первой промежуточной частоты выбирают выше 30 МГц. Генератор плавного диапазона G1 обеспечивает настройку приемника на частоту сигнала выбранной станции. Первая промежуточная частота выделяется фильтром Z2. Далее сигнал поступает на вход усилителя А2, нагрузкой которого является второй преобразователь частоты V2.
Вторая промежуточная частота выбирается достаточно низкой. На ней происходит основное усиление сигнала. Второй гетеродин G2 – неперестраиваемый и высоко стабильный. Его частота выбирается в соответствии со стандартом на частоты современного ряда кварцевых резонаторов. Сигнал второй промежуточной частоты выделяется фильтром Z3 и усиливается резонансным усилителем А3, после чего поступает на вход детектора V3. Низкочастотный сигнал с выхода детектора усиливается усилителем низких частот А4, нагрузкой которого является динамик.
Радиоприемник снабжен двухпетлевой системой автоматической регулировки усиления. Цепь АРУ-1 состоит из детектора АРУ AД-1 и фильтра низких частот. Эта цепь обеспечивает линейность работы усилителей А1 и А2 при резком возрастании уровня сигналов в антенне. Она является защитой не только от перегрузки каскадов приемника полезным сигналом высокого уровня, но и от интермодуляционных искажений, вызываемых одновременным действием мощных внеполосных помех. С этой целью управляющее напряжение в цепь АРУ-1 снимается до полосового фильтра Z2, т.е. до проведения основной фильтрации. В случае помехи высокого уровня коэффициент передачи аттенюатора R уменьшается, что предотвращает появление перекрестной модуляции или интермодуляционной помехи. В цепь АРУ-2 входят детектор АРУ AД-2 и фильтр низких частот. Эта цепь предотвращает перегрузку усилителя низких частот А4 в случае резкого возрастания уровня полезного сигнала. В этом случае действие АРУ-2 сводится к уменьшению усиления УПЧ-2 А3 и обеспечению линейности его работы.
Чувствительность, динамический диапазон и линейность тракта приема во многом зависят от правильности распределения усиления по каскадам. В процессе проектирования приходится принимать компромиссное решение, удовлетворяющее в той или иной мере требованиям как по чувствительности, так и по линейности тракта. Увеличение усиления в первых каскадах приемника приводит к увеличению чувствительности, но может привести к уменьшению динамического диапазона. Уменьшение усиления, наоборот, позволяет расширить динамический диапазон, но приводит к снижению чувствительности.
Селективность по зеркальному каналу и по каналу прямого прохождения без труда обеспечивается с помощью фильтра нижних частот в инфрадинных приемниках с преобразованием частоты «вверх», т.е. когда первая промежуточная частота выбрана «выше» максимальной частоты принимаемого сигнала. Это позволяет увеличить частоту первого зеркального канала и за счет этого обеспечить заданное подавление этого канала с помощью достаточно простого широкополосного фильтра входной цепи и УРЧ. В случае использования широкого частотного диапазона приема входную цепь реализуют в виде набора неперестраиваемых ПФ с перекрывающимися амплитудно-частотными характеристиками либо в виде набора перестраиваемых ПФ.
Последовательно с ФНЧ включают фильтр верхних частот с частотой среза 1,5 МГц для ослабления помех от станций, работающих в диапазонах километровых и гектометровых волн.
Преобразователи частоты оказывают существенное влияние на линейность и коэффициент шума приемника. В зависимости от типа смесительного элемента различают преобразователи на биполярных транзисторах, полевых транзисторах и на диодах. В первых преобразователях частоты чаще используют полевые транзисторы с квадратичными вольт-амперными характеристиками или диодные смесители. С целью уменьшения интермодуляционных искажений применяют балансные и двойные балансные схемы. Режим работы смесителя устанавливается так, чтобы обеспечить высокую линейность и малые собственные шумы.
В настоящее время в схемах приемников широкое применение находят аналоговые перемножители сигналов, с помощь которых могут быть реализованы не только преобразование частоты, но и операции частотного и фазового детектирования, синхронное амплитудное детектирование, регулировка усиления и пр. Выпускаются аналоговые перемножители сигналов как в виде отдельных интегральных схем, так и в составе специализированных микросхем.
К усилителю первой промежуточной частоты предъявляются высокие требования по линейности. В качестве усилительных приборов выбирают малошумящие биполярные или полевые транзисторы. Принимаются меры по обеспечению высокой температурной стабильности режима каскадов. Усиление первой промежуточной частоты обычно составляет около 20 дБ. Частотная селекция обеспечивается применением кварцевых фильтров, фильтров на поверхностных акустических волнах (ПАВ), электромеханических фильтров или фильтров на керамической основе.
Ко второму смесителю предъявляют, как и к первому, высокие требования по линейности, но менее жесткие требования по шумам.
Второй усилитель промежуточной частоты УПЧ-2 должен обеспечить основное усиление в главном тракте приемника, а также достаточно глубокую регулировку усиления. Его усиление меняется системой АРУ-2 от нескольких тысяч до нескольких десятков. Регулировка усиления не должна ухудшать линейности тракта. Для усиления могут использоваться дискретные элементы или интегральные микросхемы. Возможно использование нескольких идентичных каскадов. С выхода УПЧ-2 сигнал подается на вход детектора.
Современные тенденции развития техники приема состоят в том, что в магистральные приемники вводятся различного рода ручные и автоматические регулировки отдельных параметров (усиления, избирательности, частоты настройки) или даже предусматриваются автоматические изменения его общей структуры и алгоритма работы в зависимости от непрерывно меняющихся условий связи. Это позволяет обеспечить близкий к оптимальному прием при достаточно быстрых изменениях характеристик сигналов и помех. Специальная аппаратура автоматического контроля позволяет по заранее введенной программе производить как оценку работоспособности приемника, так и оценку качества принимаемого сигнала. Все эти меры значительно увеличивают надежность приема сообщения.
Радиолокационные приемники
Радиолокационный приемник является частью радиолокационной станции (РЛС) и, как правило, работает от общей с передатчиком приемопередающей антенны. Различают РЛС непрерывного и импульсного излучения. Обработка сигнала в приемнике предусматривает обнаружение сигнала, отраженного от цели, и (или) определение его параметров, например, по задержке приятого сигнала (относительно зондирующего) определяется дальность до цели. Функции обнаружения сигнала и измерения его параметров могут быть расчленены.
Оптимальный приемник простого импульсного сигнала (с базой порядка единицы) состоит из двух частей: широкополосной линейной части и оптимального обнаружителя или измерителя. В широкополосном линейном тракте производится усиление сигнала до уровня, необходимого для нормальной работы обнаружителя или измерителя, а также предварительная фильтрация сигнала. На первом этапе приемное устройство РЛС работает в режиме обнаружения сигнала. На втором решается задача измерения его параметров. Мы ограничимся задачей обнаружения.
Математически задача обнаружения сигнала на фоне флуктуационной помехи сводится к вычислению корреляционного интеграла и его сравнения с заданным порогом обнаружения. Для сигнала u (t), форма которого считается известной, формируется опорный сигнал u 0(t), отличающийся от него только произвольным фазовым сдвигом и уровнем. Корреляционным интегралом называют результат интегрирования их произведения:
 .
.
При φ = 0 и t з = 0 корреляционный интеграл принимает наибольшее значение и обеспечивается наивысшее достижимое отношение сигнал/шум. Это обеспечивает наилучшие характеристики обнаружения.
Устройства, вычисляющие корреляционный интеграл, могут быть двух типов. Используется либо коррелятор, либо согласованный фильтр. Их схемы приведены на рис. 2.3.
Рис. 2.3. Устройства, вычисляющие корреляционный интеграл:
а – коррелятор; б – согласованный фильтр
Эти схемы применяются при когерентной обработке сигнала. В случае использования коррелятора опорный сигнал должен совпадать по фазе с принимаемым, интегрирование должно начинаться в момент прихода ожидаемого сигнала и заканчиваться в момент его окончания. В случае применения согласованного фильтра момент замыкания ключа должен совпадать с моментом окончания ожидаемого сигнала с точностью не хуже одной десятой доли периода несущей частоты импульса на входе фильтра. Указанные условия реализовать на практике достаточно сложно, поэтому обычно используются методы некогерентной обработки.
Структуры некогерентных приемников обнаружения одиночного радиоимпульса приведены на рис. 2.4.
Рис. 2.4. Оптимальные некогерентные приемники обнаружения:
а – фильтровая; б – корреляционно-фильтровая; в – квадратурная схемы
Применяют один из следующих вариантов схемы:
- а – фильтровая схема;
- б – корреляционно-фильтровая схема;
- в – квадратурная схема.
Фильтровой приемник обнаружения состоит из согласованного фильтра (СФ), выполняемого обычно на промежуточной частоте, линейного детектора (ЛД), синхронизирующего устройства (СУ) и порогового устройства (ПУ). Неизвестная начальная фаза принимаемого сигнала исключается за счет применения детектора до фиксации момента окончания сигнала t = t 2, выполняемого синхронизирующим устройством. Благодаря этому с пороговым напряжением сравнивается огибающая сигнала и требования к точности синхронизации многократно снижаются.
Корреляционно-фильтровой приемник обнаружения имеет коррелятор, работающий на промежуточной частоте. Коррелятор образован перемножителем (преобразователем частоты) и полосовым фильтром ПФ, постоянная времени которого значительно больше длительности импульса. Фильтр выполняет роль интегратора высокочастотного колебания. Сигнал на выходе коррелятора при воздействии на него радиоимпульса с прямоугольной огибающей имеет вид высокочастотного импульса с треугольной огибающей. Далее сигнал детектируется, и полученный треугольный импульс в момент достижения максимума напряжения сравнивается с пороговым уровнем.
Оптимальный квадратурный приемник обнаружения состоит из двух квадратурных каналов с корреляторами (Кор), на выходах которых установлены квадраторы (Кв). Выходные напряжения квадраторов суммируются, в результате чего образуется квадрат модуля корреляционного интеграла:
│ Z │2 = Z 12 + Z 22,
не зависящий от начальной фазы сигнала. Далее, как и в предыдущих схемах, следуют синхронизирующее и пороговое устройства.
Величину порога U пор выбирают обычно в соответствии с критерием Неймана-Пирсона, при котором фиксируется вероятность ложной тревоги P л т :
 ,
,
где U 0 = U пор /  , Е – энергиясигнала, N 0 – спектральная плотность мощности шума, U – напряжение огибающей.
, Е – энергиясигнала, N 0 – спектральная плотность мощности шума, U – напряжение огибающей.
Качество обнаружения определяется рабочей характеристикой, представляющей собой зависимость вероятности правильного обнаружения от вероятности ложной тревоги при различных отношениях сигнал/шум.
Вероятность правильного обнаружения рассчитывается по формуле:
 ,
,
где I 0(x) – функция Бесселя. Отношение сигнал/шум принимается в виде γ = 2 Е / N 0.
Качество всех трех видов некогерентных обнаружителей одинаково. Решение о том, какую из схем обнаружителей выбрать, определяется конструктивными соображениями.
При проектировании РЛС задают определенные значения вероятности правильного обнаружения и вероятности ложной тревоги. Затем определяют отношение сигнал/шум γ, порог обнаружения U пор и чувствительность приемника.
Реализация оптимальных алгоритмов обнаружения иногда приводит к чрезмерному усложнению и удорожанию приемника. В этих случаях приходится изменять некоторые параметры оптимального алгоритма или видоизменять сам алгоритм, а иногда делать и то и другое. При этом конструктивные, технические, а часто и эксплуатационные параметры приемника улучшаются, но увеличивается пороговое отношение сигнала к шуму по сравнению с требуемым в оптимальном алгоритме. Если увеличение невелико, то измененный алгоритм называют подоптимальным.
При приеме одиночного радиоимпульса (простого сигнала с базой порядка единицы) вполне возможно использовать вместо согласованного (оптимального) фильтра фильтр с амплитудно-частотной характеристикой близкой к прямоугольной или к колоколообразной. Близкая к прямоугольной АЧХ получается в УПЧ с системой связанных контуров, близкая к колоколообразной – в УПЧ с одиночными настроенными в резонанс контурами. За счет правильного подбора полосы пропускания такого фильтра можно свести к минимуму потери из-за неоптимальности формы АЧХ. Такие фильтры называют квазиоптимальными.
Расчет оптимальной полосы пропускания для радиоимпульса с прямоугольной огибающей ведут по формулам:
П опт = 1,37/ t и – при прямоугольной АЧХ,
П опт = 0,8/ t и – при колоколообразной АЧХ.
Потери в пороговом отношении сигнал/шум при этом составляют 0,8 дБ в случае прямоугольной АЧХ и 0,3 дБ в случае колоколообразной АЧХ. Если огибающая радиоимпульса имеет колоколообразный характер, потери еще меньше. Таким образом, форма АЧХ мало влияет на пороговый сигнал.
Вследствие нестабильности частот РЛС и доплеровского сдвига частоты принимаемого сигнала приходится расширять полосу радиотракта по сравнению с полосой, согласованной с импульсным сигналом:
П = П опт + 2Δ f д +  ,
,
где П опт – оптимальная полоса, Δ f д – максимальный сдвиг доплеровской частоты, – нестабильность частоты РЛС с учетом действия системы АПЧ, если она введена. При расширении полосы возникают потери. В случае прямоугольной огибающей радиоимпульса и прямоугольной АЧХ приемника общие потери (по сравнению с оптимальным вариантом) составляют 1,9 дБ при П t и = 2 и 7 дБ при П t и = 5. Сужение полосы по сравнению с оптимальной также ведет к увеличению потерь (порядка 3 дБ при П t и = 0,5).
Квазиоптимальная фильтрация не применяется при приеме сложных сигналов, база которых может достигать величины порядка десятков и сотен тысяч, так как в этом случае преимущества сложных сигналов практически сводятся на нет.
Пример варианта структурной схемы радиолокационного приемника, входящего в РЛС конического сканирования и работающего от общей антенны с передатчиком, приведена на рис. 2.5.
Тракт радиочастоты состоит из разрядника, защищающего вход приемника в момент излучения сигнала передатчиком, и усилителя радиочастоты. В тракт промежуточной частоты входят смеситель См-1, гетеродин, усилитель промежуточной частоты УПЧ-1 и амплитудный детектор. Для защиты приемника от действия мощных импульсных помех, длительность которых превышает длительность полезного сигнала, введена система быстродействующей автоматической регулировки усиления БАРУ, время срабатывания которой больше длительности сигнала, но меньше длительности помехи.
Рис. 2.5. Пример варианта структурной схемы радиолокационного приемника: П – передатчик, ДМ – делитель мощности, Разр. – разрядник, УРЧ – усилитель радиочастоты, См – смеситель, УПЧ – усилитель промежуточной частоты, АД – амплитудный детектор, ВУ – видеоусилитель, Г – гетеродин, ЧД – частотный дискриминатор, РЧ – регулятор частоты
Нестабильность частот передатчика и гетеродина компенсируется системой автоматической подстройки частоты, в которую входят делитель мощности, второй смеситель См-2, второй усилитель промежуточной частоты УПЧ-2, частотный дискриминатор и регулятор частоты. В видеотракте использован видеоусилитель. Для расширения динамического диапазона приемника в основном тракте часто используются логарифмические усилители.
При расчете радиолокационного приемника обычно задаются: длина волны (частота) сигнала, длительность импульса, частота следования импульсов, длительность фронта, нестабильность частоты сигнала, реальная чувствительность, коэффициент различимости, избирательность по зеркальному каналу, динамический диапазон принимаемых сигналов, допустимое изменение амплитуды сигнала на входе детектора, напряжение на выходе приемника, сопротивление и емкость нагрузки.
Полоса пропускания приемника зависит от назначения РЛС и предъявляемых к ней технических требований. В тех случаях, когда первостепенное значение имеет дальность действия станции, и вопрос точности определения расстояния особо не оговорен, полосу пропускания приемника выбирают оптимальной с точки зрения характеристик обнаружения, как уже было описано выше.
Точное определение расстояния до цели зависит от крутизны фронта импульса на выходе приемника. Время нарастания распределяют по отдельным блокам приемника:
 ,
,
где τ вч – время нарастания фронта импульса в высокочастотном тракте,τ ад – время нарастания фронта импульса в детекторе,τ вх – время нарастания фронта импульса в видеоусилителе. Близкое к оптимальному распределение получается при τ вч = 0,9τ ф; τ ад = 0,27 τ ф; τ ву = 0,36 τ ф. Эти соотношения являются исходными при определении полосы пропускания высокочастотного тракта и видеоусилителя. В частности, полоса пропускания высокочастотного тракта определяется следующим образом:
 ,
,
где П нс – результирующая нестабильность частот, КАПЧ – коэффициент автоподстройки частоты. Относительная нестабильность частоты передатчика при проектировании приемника обычно задается в ТЗ. Ее величина может быть порядка 10–3. Примерно такой же порядок имеет относительная нестабильность частоты транзисторного гетеродина. Неточность настройки УПЧ составляет примерно (0,003…0,01) f п. Результирующая нестабильность определяется суммированием отдельных нестабильностей в среднеквадратическом смысле (рассчитывается корень квадратный из суммы квадратов абсолютных нестабильностей). Расширение полосы частот по сравнению с оптимальным вариантом не должно превышать 10…20%. Это требование позволяет решить вопрос о необходимости введения системы АПЧ и о значении коэффициента автоподстройки.
Выбор первых каскадов определяется допустимым коэффициентом шума приемника, который рассчитывается по заданной чувствительности. При этом возможны следующие основные варианты:
- схема начинается с диодного или транзисторного смесителя;
- в схему вводится транзисторный усилитель радиочастоты;
- применяется параметрический усилитель без охлаждения или с охлаждением.
Расчет рекомендуется начать с наиболее простого первого варианта. В случае диодного смесителя коэффициент шума приемника рассчитывается по формуле
N = N УПЧ / (K Ф K Р K С),
где N УПЧ = 2 N Тр (N Тр – коэффициент шума первого транзистора УПЧ, обычно порядка 3…5 дБ), K Ф = 0,9; K Р = 0,7…0,8; K с = 0,2…0,3 (1…7) – соответственно коэффициенты передачи (по мощности) фидера, разрядника и диодного (транзисторного) смесителя. Если рассчитанный коэффициент шума не превышает допустимого, полученного на основе заданной чувствительности, на этом варианте и останавливаются.
Если коэффициент шума приемника оказывается больше допустимого, применяют транзисторный усилитель радиочастоты, или (если N доп<5) параметрический усилитель.
Промежуточная частота выбирается в интервале 30…120 МГц, при этом руководствуются следующими основными соображениями:
- повышение промежуточной частоты улучшает фильтрацию составляющей промежуточной частоты после видеодетектора;
- для лучшего воспроизведения формы огибающей импульса период промежуточной частоты должен составлять не более 0,05 t и;
- низкая промежуточная частота обеспечивает повышенную устойчивость УПЧ, позволяет уменьшить его коэффициент шума, но требует более совершенной системы АПЧ;
- большая избирательность по зеркальному каналу обеспечивается при выборе более высокой промежуточной частоты.
Приемники цифровых данных
Особенностями устройств передачи и приема цифровых данных являются:
- формирование информационного сигнала в виде цифровой последовательности значений, например, нулей и единиц. При этом для аналогового сигнала обязательна процедура аналого-цифрового преобразования – квантования значений сигнала по уровню в дискретные моменты во времени;
- формирование излучаемого сигнала путём манипуляции сигнала генератора несущей частоты одной информационной последовательностью (или сразу несколькими последовательностями при частотном и временном уплотнении);
- простота точного восстановления информационной последовательности в приемнике, т.к. небольшие помехи и искажения передаваемого сигнала при демодуляции сравнительно легко «отбрасываются» решающим устройством при сопоставлении уровня сигнала одному значению из небольшого множества (либо «0», либо «1» для бинарного сигнала);
- возможность применения специальных помехоустойчивых кодов, квазиоптимальных и адаптивных методов приема сигналов, цифровой обработки сигнала (ЦОС) с запоминанием большого числа параметров и массивов самого сигнала;
- приемники цифровых данных с ЦОС обеспечивают высокую стабильность характеристик за счет отсутствия свойственных аналоговым цепям параметрических уходов. Аппаратура ЦОС не требует настройки, а элементная база более однородна.
Однако цифровым узлам присущи и недостатки в основном связанные с большей аппаратурной сложностью: большее потребление, необходимость учёта и согласования узлов по тактовой частоте, увеличение задержки доставки сигнала. Можно также отметить, что при недостаточном соотношении уровня сигнал/шум в радиоприемниках цифровых данных выходной сигнал, выдаваемый на оконечное устройство, пропадает (должен игнорироваться полностью или частично), т.к. потеря синхронизации не позволяет «различать» старшие и младшие разряды в данных, в то время как для радиоприемников аналоговых сигналов речевое сообщение можно воспринимать со слышимыми шумами и искажениями. Частичную потерю данных можно минимизировать различными способами избыточного кодирования и перемешивания информационных пакетов по времени и по частоте излучаемого сигнала.
Передача цифровых данных осуществляется преимущественно в выделенных диапазонах 433,92 МГц, 868,3 МГц, 800 – 900 МГц, 1800 – 1900 МГц и 2,4 ГГц. Поскольку передача сигнала ведется, как правило, на малое расстояние (от 1 до 2000 м) и в условиях значительного уровня городских помех, большое значение при проектировании таких приемников уделяется их эффективной чувствительности и избирательности. Обычно чувствительности приемников цифровых сигналов лежат в диапазоне 90 – 110 дБм, полосы пропускания в диапазоне от 3 кГц до 54 МГц. Кроме того, приемники такого вида зачастую являются мобильными, поэтому особые требования предъявляются к их массогабаритным показателям.
Для передачи цифровых данных используются сигналы с различными современными (частотно-эффективными) методами манипуляции: частотной (ЧМн), фазовой (ФМн), амплитудно-фазовой (АФМн). Сигнал с амплитудной манипуляцией (АМн) менее помехоустойчив, но наиболее прост при формировании, приеме и демодуляции. Полоса пропускания радиотракта выбирается исходя из значения допустимых искажений либо из условия получения максимального отношения сигнала к помехе.
Линейная додетекторная часть радиотракта приемников цифровых данных может строиться по тем же структурным схемам приемников аналоговых сигналов. В большинстве случаев приемники цифровых данных строятся по супергетеродинной схеме с однократным преобразованием частоты, но так же встречаются сверхрегенеративные приемники и приемники прямого преобразования.
Так как на выходе такого приемника (на входе ОУ) должен присутствовать сигнал в цифровом виде, в качестве последнего каскада ставится пороговое устройство (ПУ) – компаратор (для бинарной информационной посылки) или дешифратор. При этом структурные схемы таких приемников могут выглядеть так, как показано на рис. 2.6 а, б. Приемник прямого усиления удобен и прост в реализации при фиксированной настройке для случая приема широкого спектра сигналов или при отсутствии сигналов и помех на побочных каналах.

Рис. 2.6. Примеры структурных схем приемников цифровых данных:
а – прямое усиление; б – супергетородин
Высокочастотный селективный усилитель ВЧ СУ в таких приемниках строится на основе фильтра на поверхностных акустических волнах, имеющего малые габариты и высокие селективные свойства. Такие же фильтры, как правило, используются и в фильтре промежуточной частоты ФПЧ и в качестве полосовых фильтров ВЧ ПФ, включенных на рис. 2.6 б в качестве входной цепи супергетеродинного приемника.
Таким образом, специфика приема сигналов цифровых данных заключается в основном в детектировании и в последетекторной обработке сигнала.
Рассмотрим пример структурной схемы детектора сигналов с амплитудной манипуляцией – рис. 2.7.
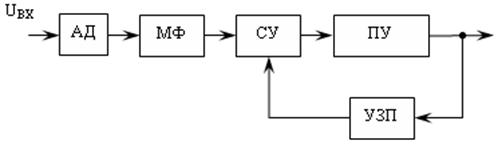
Рис. 2.7. Вариант детектора сигналов с амплитудной манипуляцией
Амплитудный детектор АД, преобразует АМн-радиоимпульсы в видеоимпульсы, далее манипуляционный фильтр МФ, сглаживает сигнал, уменьшая провалы в посылках и выбросы в паузах. Симметрирующее устройство СУ, обеспечивает оптимальный порог срабатывания порогового устройства ПУ: ЕПОР = UВХ/2.
Пороговое устройство ПУ, улучшает форму получаемых видеоимпульсов, а устройство защиты паузы, корректирует работу СУ, защищая ПУ от помех в паузах, т.к. в паузе UВХ = 0 и ЕПОР ® 0, то любая помеха может вызвать ложное срабатывание ПУ.
Аналогичным образом могут быть построены детекторы ЧМн-сигналов – рис. 2.8. Амплитудный ограничитель АО необходим для корректной работы частотного детектора ЧД. УЗП не используется, т.к. при непрерывной передаче информационного сообщения пауз в сигнале с ЧМн не возникает.

Рис. 2.8. Детектор сигналов с частотной манипуляцией
Для детектирования ФМн-сигналов при относительной фазовой телеграфии (изменение фазы излучаемого сигнала от одной посылки к другой происходит в том случае, если следующая посылка, например, = 0) можно использовать фазовый детектор ФД, где происходит сравнение фаз соседних посылок, на второй вход которого подается тот же сигнал, но задержанный на длительность t0 одной посылки («0» или «1») – см. рис. 2.9.
Рис. 2.9. Детектор сигналов с фазовой манипуляцией
Для обеспечения правильной регистрации сигналов в приемном устройстве необходимо согласовать моменты отсчетов с поступлением элементарных сигналов, образующих кодовые комбинации, границы между которыми также должны быть точно известны. С этой целью могут использоваться специальные системы синхронизации, управляющие приемным распределителем – устройством, осуществляющим отсчет элементарных посылок и кодовых комбинаций.
Дополнительно рассмотрим пример упрощенной структурной схемы приемника прямого преобразования с использованием цифрового сигнального процессора (ЦСП), где решение проблем синхронизации элементарных посылок эффективно решается без усложнения аппаратной структуры – рис. 2.10.
Рис. 2.10. Пример структурной схемы приемника на базе цифрового сигнального процессора
При прямом преобразовании синтезатор частоты СЧ настраивается на частоту несущего колебания, и на смесители подаются сигналы смещённые по фазе на p/2. Обработка сигнала выполняется аналогично квадратурной схеме оптимального некогерентного приемника (см. рис. 2.4 в), без необходимости знания начальной фазы принимаемого сигнала, но здесь полученные в смесителях и усиленные в УНЧ квадратурные составляющие после аналого-цифровых преобразований поступают в ЦСП для последующей программно-аппаратной обработки в соответствии с выбранным типом модуляции/манипуляции. Выходной сигнал поступает на цифровые оконечные устройства и/или через ЦАП на аналоговые ОУ.
Современные ЦСП могут содержать встроенные декодеры, шины параллельных и последовательных интерфейсов, блоки АЦП, ЦАП, ШИМ, которые могут быть использованы для управления синтезатором частоты СЧ и параметрами (коэффициентами усиления, полосой частот) ВЦ, УРЧ, УНЧ. На индикаторы может выдаваться произвольная информация, в том числе частоты настройки, вид модуляции и качество сигнала, параметры режима работы приемника и т.д.
Эскизное проектирование
При эскизном проектировании для выбора и обоснования структурной схемы приемника решаются следующие вопросы:
– выбор способа обработки сигнала и типа структурной схемы;
– расчет сквозной полосы пропускания приемника;
– определение числа поддиапазонов и избирательной системы тракта промежуточной частоты;
– выбор структуры первых каскадов преселектора и числа преобразований частоты;
– выбор электронных приборов для высокочастотного тракта;
– распределение усиления между трактами приемника;
– оценка динамического диапазона приемника;
– выбор тракта усиления низких частот;
– выбор регулировок приемника.






