Свойства гироскопа используются в приборах - гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы. Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае - статическими гироскопами. Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы. Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента. Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться маятником, так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп.

Рисунок 2.1. - Схема простейшего механического гироскопа в карданном подвесе
Большое применение находят гироскопические приборы для автоматического управления движением самолетов и кораблей. Для поддержания заданного курса корабля служит «авторулевой», а самолета - «автопилот»..В приборе «авторулевой» применен свободный гироскоп с большим собственным моментом импульса и малой силой трения в местах карданова подвеса. Направление движения корабля задается направлением оси свободного гироскопа. При любых отклонениях корабля от курса, ось гироскопа сохраняет свое прежнее пространственное направление, а карданов подвес поворачивается относительно корпуса корабля. Поворот рамы карданова подвеса отслеживается при помощи специальных устройств которые выдают команды автоматам на поворот руля и возвращение корабля на заданный курс.
«Автопилот» снабжен двумя гироскопами. У одного из них ось располагают вертикально и в таком положении раскручивают гироскоп. Вертикально расположенная ось гироскопа задает горизонтальную плоскость. Ось второго гироскопа располагают горизонтально, ориентируя ее вдоль оси самолета. Этот гироскоп постоянно "знает" курс самолета. Оба гироскопа дают соответствующие команды механизмам управления, поддерживающим полет самолета по заданному курсу.В настоящее время автопилотами оборудованы все современные самолеты, предназначенные для длительных полетов. Гироскоп служит важной составной частью в системах управления космических аппаратов.
Гироскопы применяют так же в системах навигации. Инерциальная навигация относится к такому способу определения местоположения в пространстве, при котором не используются данные каких-либо внешних источников. Все чувствительные элементы находятся непосредственно на борту транспортного средства. Инерциальные измерители линейных ускорений - акселерометры установлены на так называемой гиростабилизированной платформе. Эта платформа, используя свойства гироскопа - сохранять неизменной ориентацию своей оси в пространстве, обеспечивает строго горизонтальное положение осей чувствительности акселерометров. Измеренные ускорения дважды интегрируются, и, таким образом, получается информация о приращении местоположения подвижного объекта. Объединенные общей задачей определения координат подвижного объекта, гироскопы и акселерометры образуют инерциальную навигационную систему. Помимо этой задачи она поставляет информацию об угловой ориентации объекта: углах крена, тангажа и рыскания и о скорости объекта.
Конструкция современной инерциальной навигационной системе вобрала в себя последние достижения точной механики, теории автоматического управления, электроники и вычислительной техники. Конструктивно инерциальную навигационную систему можно разделить на два класса: платформенные и бескарданные. В первых гиростабилизированная платформа реализована физически в виде рамы трехстепенного карданного подвеса. В таких системах используются традиционные гироскопы с вращающимся ротором. Эти системы входят в состав бортового навигационного оборудования тяжелых самолетов.
Другой класс - бесплатформенные отличаются тем, что плоскость горизонта в них реализована математически, используя данные гироскопов и акселерометров. В этих системах могут быть использованы лазерные и волоконно-оптические гироскопы. Здесь нет вращающихся частей, а об угловой скорости судят по фазовой задержке лазерного луча пробегающего по замкнутому контуру. Они существенно конструктивно проще и дешевле платформенных.Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
Простейший гироскоп
Простейшим гироскопом является обыкновенный детский волчок, быстро вращающийся вокруг своей оси. Ось волчка может изменять своё положение в пространстве, поскольку её верхний конец не закреплен. У гироскопов применяемых в технике, свободный поворот оси можно обеспечить, закрепив её в рамках карданова подвеса, позволяющего оси волчка занять любое положение в пространстве. Такой гироскоп имеет три степени свободы. Свойства гироскопа проявляются при выполнении двух условий: ось вращения гироскопа должна иметь возможность изменять своё направление в пространстве, и угловая скорость вращения гироскопа вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Первое свойство гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление.Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей. Впервые это свойство гироскопа использовал французский учёный Л. Фуко для экспериментального доказательства вращения Земли вокруг её оси в 1852 г.. Отсюда и само название «гироскоп», что в переводе означает «наблюдать вращение». Второе свойство гироскопа обнаруживается, когда на его ось начинают действовать сила или пара сил, стремящиеся привести ось в движение. Под действием силы конец оси гироскопа будет отклоняться в направлении, перпендикулярном к этой силе; в результате гироскоп вместе с рамкой начнёт вращаться вокруг оси, притом не ускоренно, а с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси сам гироскоп. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось мгновенно остановится, т. е. прецессионное движение гироскопа безынерционно. Наряду с прецессией ось гироскопа при действии на неё силы может ещё совершать нутацию - небольшие, но быстрые, обычно незаметные на глаз, колебания оси около её среднего направления. Размахи этих колебаний у быстро вращающегося гироскопа очень малы и из-за наличия сопротивления и быстро затухают. Прецессионное движение можно наблюдать и у детского волчка.
Если ось такого волчка поставить под углом к вертикали и отпустить, то она под действием силы тяжести будет отклоняться в перпендикулярном направлении, и начинает прецессировать вокруг вертикали.
Прецессия волчка также сопровождается незаметными на глаз нутационными колебаниями, быстро затухающими из-за сопротивления воздуха. Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии возрастает. Когда угловая скорость вращения волчка становится меньше определенной величины, он теряет устойчивость и падает.
У медленно вращающегося волчка нутационные колебания могут быть довольно заметными и, слагаясь с прецессией, изменять картину движения оси волчка: верхний конец оси будет описывать волнообразную или петлеобразную кривую.
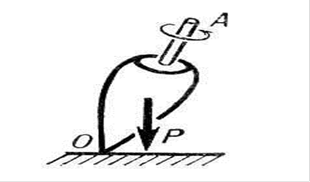
Рисунок 2.2. - Волчок
Системы стабилизации
Системы стабилизации бывают трех основных типов:
. Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
. Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
. Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В США, ЕС, Японии, Украине и России выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения. Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.

Рисунок 2.3. - Кольцевой лазерный гироскоп






