Энергетическим потенциалом радиолинии называется отношение средней мощности сигнала к спектральной плотности шума, пересчитанное ко входу приемника. В радиолиниях независимо от того, в каком участке диапазона они работают, всегда присутствуют принятые антенной естественные шумы и собственные шумы приёмных устройств. Эти шумы аддитивные по отношению к сигналу на входе приёмника, имеют гауссовское распределение и практически равномерный спектр в пределах полосы пропускания приёмника. При расчётах, учитывающих действие таких шумов, удобно использовать понятие энергетического потенциала.
Энергетический потенциал определяет возможности командных радиолиний в части обеспечения точности измерения параметров движения, пропускной способности и вероятности ошибки при приёме информации.
В данной работе задана линия с расстоянием между приемником и передатчиком l=190 км. Это линия "Земля - управляемый объект". Линия связи подобного типа предназначена для передачи различных команд с пункта управления на борт беспилотного летательного аппарата.
Расстояние между приемником и излучателем l= 190 км.
Длина волны l = 10 см.
Частота f = C / l = 3 ГГц
Бортовая антенна (параболическая): dпрм=0,2;
Диаметр передающей антенны (параболическая): dпрд=3м
антенна всенаправленная (D = 1)
Длительность элементарного символа: t0 = 159 *10-6с
Эквивалентная шумовая температура бортового приемника: Тэ = 1000 К;
В соответствии с известным уравнением дальности связи мощность сигнала на входе приемника определяется выражением:
Рс вх=Ризл*G*Sэпрм*γЕ/4*π*l2
Ризл - средняя мощность, излучаемая передатчиком
G - КНД антенны передатчика
Sэпрм - эффективная площадь приемной антенны
r - расстояние между передатчиком и приемником
gЕ - коэффициент, учитывающий потери энергии сигнала в среде за счет поглощения:
gЕ = exp(- 0.23al);
для l = 10 см. a = 0,001 dB/км
Рс вх = (Ризл G Sэ прм / (4pl2)) exp(- 0.23al)
В простейшем случае, когда основной помехой являются только внутренние флюктуационные шумы приемника с равномерной спектральной плотностью No, мощность помехи на входе (при согласованном входе) равна
Рш вх=NoΔfэ=kTэΔfэ
No=kTэ
где к = 1,38*10-23 Дж/К - постоянная Больцмана
Тэ - эквивалентная шумовая температура входа.
Тогда
(Рс/Рш)вх=РизлGSэпрмexp(-0.23αl)/4πl2NoΔfэ
Это выражение определяет фактическое отношение С/Ш на входе приемника при известных параметрах линии связи.
Пусть для того, чтобы обеспечить требуемую вероятность ошибки при передаче одной двоичной еденицы информации, необходимо иметь энергетическое отношение С/Ш:
h2oтр=(Рс/Рш)вх τоΔfэ
Тогда требуемое отношение С/Ш на входе приемника:
(Рс/Рш)тр=γсистhoтр2/ τоΔfэ
γсист- коэффициент запаса, выбирается от 2 до 10
зададимся γсист = 8
По ТЗ вероятность ошибочного приёма одного символа Рош=10-4. Тогда для ФМн-сигналов можно записать:
γс-постоянный коэффициент, для ФМн-сигналов γс=21/2
h 20тр≥h20=(2/ γ2с)ln(1/2Рош)=1,41*8,5=12
h 20тр=15
Для того чтобы линия связи обеспечивала передачу информации с помехоустойчивостью не ниже заданной, необходимо выполнить условие:
(Рс/Рш)вх≥(Рс/Рш)тр
(Ризл G Sэ прм / (4pl2kTэ)) exp(- 0.23al)≥ γсистhoтр2/ τо
КНД передающей антенны
G=ha(pdпрд/l)2,где
ha - КИП (коэффициент использования площади) - коэффициент учитывающий эффективность использования площади раскрыва антенны (0,55 для параболической)
Вычислим Sэ прм и Sэ прд:
Sэ прм==hapd 2прм/4;
Sэ прм=0,55*3,14*0,22/4=0,07м2
Sэ прд=hapd 2прд/4;
Sэ прд=0,55*3,14*32/4=3,88м2
G=0,55(3,14*3/0.03)2 =54228;
G =47 дБ.
Мощность передатчика:
Ризл*1,6*1018 ³ 754717
Ризл ³ 4,7*10-13
Возьмем Рпрд = 10 Вт для того чтобы скомпенсировать неучтённые факторы (помехи, неточность ориентации антенны и.т.д.).
Принцип работы передатчика
Сигнал с датчиков или любых других источников аналоговой информации поступает на быстродействующие аналоговые ключи. Работой, которых управляет схема временного разделения каналов, состоящая из дешифратора 1, счётчика 1 и генератора импульсов 1.Схема работает следующим образом:
Генератор импульсов 1 выдаёт короткие импульсы расстояния, между которыми равны времени преобразования А.Ц.П. Эти импульсы подсчитываются трёхразрядным асинхронным счётчиком импульсов граф которого имеет такой вид

Такой счётчик легко реализовать на трёх синхронных D-триггерах. Трёх разрядный двоичный код со счётчика 1 поступает на дешифратор 1, который в зависимости от кода подключает соответствующие каналы.
Таким образом, на вход А.Ц.П. поступают последовательно аналоговые сигналы с соответствующих аналоговых входов. А.Ц.П. синхронизируется побитовым генератором. Это генератор коротких импульсов, расстояние между которыми равно длительности элементарного символа в коде. А.Ц.П., как правило, содержит на выходе параллельный регистр, у которого выходы находятся в так называемом третьем состоянии (высокий импенданс). Чтобы обеспечить вывод данных нужен сигнал разрешения он поступает от генератора импульсов 1. После вывода параллельного кода выводы этого регистра автоматически переходят обратно в третье состояние.
С А.Ц.П. выходит 9 разрядный параллельный код командного слова, который поступает на преобразователь кода из параллельного в последовательный. Такой преобразователь может быть выполнен на параллельно-последовательном регистре, который синхронизируется также от побитового генератора.
В качестве синхрослова используется 63 разрядная М-последовательность. Синхрослово должно быть в начале кадра. Схема формирования синхрослова может быть выполнена на основе формирователя М-последовательности и на основе П.З.У. Первый вариант схемы (рис.1) работает таким образом:
Имеется формирователь М-последовательности (Ф.М.П.), который легко реализуется с помощью линейных переключательных схем на основе сдвигающих регистров. Принцип формирования в данном проекте рассматривать не будем, он очень подробно рассмотрен в литературе [1]. В качестве синхросигнала для Ф.М.П. используется побитовый генератор импульсов. Генерация последовательности начинается, когда приходит сигнал высокого уровня со схемы сравнения (сигнал пуск). Такой сигнал возможен только в том случае если подключен первый канал и начат вывод из А.Ц.П. первого кодового слова. Для формирования 63 разрядной М-последовательности необходимо 64 импульса. Схема подсчёта этих импульсов выполнена на счётчике 2 и дешифраторе 2. Как только счётчик насчитывает 64 импульса на соответствующем выходе дешифратора появляется сигнал высокого уровня (сигнал останов.), который останавливает Ф.М.П. Так как счётчик 2 будет постоянно считать импульсы с побитового генератора импульсов, то в момент начала формирования М-последовательности его надо вернуть в исходное состояние (сбросить). Для этого сигнал пуск со схемы сравнения подаётся на ключ, который подключает сигнал высокого уровня на небольшое время к входу сброса счётчика. Сигнал останов. также переводит регистр-преобразователь кода из третьего состояния в рабочее и с его выхода начинает выходить М-последовательность в последовательном двоичном коде. Как только все 63 разряда синхрослова выйдут из регистра, он автоматически переходит в третье состояние.
Второй вариант схемы (рис.2) формирования М-последовательности основан на использовании П.З.У. Принцип работы такой:
Аналогично схеме с генератором М-последовательности имеется сигнал пуск. Он поступает на П.З.У. и переводит его в режим считывания. В П.З.У. заранее запрограммирована нужная 63 разрядная М-последовательность. Также на П.З.У. поступает сигнал синхронизации от битового генератора, как и в предыдущей схеме. Синхрослово выходит в параллельном коде из П.З.У. и поступает на преобразователь кода в виде регистра. После вывода П.З.У. выходит из режима считывания и ждёт сигнал пуск. Сигнал пуск также переводит преобразователь кода в рабочее состояние, и начинается вывод синхрослова в последовательном коде под действием сигнала синхронизации, поступающего от битового генератора. Эта схема наиболее простая так как требуется меньше сигналов управления по сравнению со схемой на формирователе. Также малогабаритнее, дешевле и надёжнее так как используется меньше радиоэлементов и микросхемы П.З.У. такой малой емкости очень дёшевы. В работе я рассмотрел простейший вариант схемы. Вообще, как правило, такие схемы формирования делаются на микропроцессорном комплекте или микроконтроллерах, тогда всё управление можно осуществлять программным путём через порты ввода-вывода.
Синхрослово поступает на сумматор, где суммируется с кодовыми словами. Чтобы не было наложения синхрослова на кодовые слова необходимо задержать кодовые слова на время равное длительности синхрослова. Это делается с помощью цифровой линии задержки или блока памяти.
В результате образуется кадр, состоящий из синхрослова и 7кодовых слов, разделённых по времени. Далее,сигнал поступает на в.ч. каскад (рис.3) где он поступает на фазовый манипулятор, с помощью которого манипулируется поднесущая. Сформированным фазоманипулированным сигналом на поднесущей осуществляется фазовая модуляция несущего колебания.
На в.ч. каскад
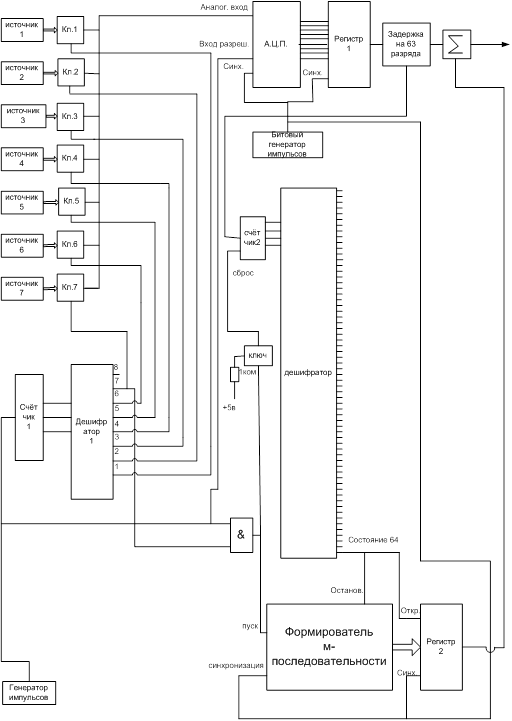
Рис. 1
На в.ч. каскад
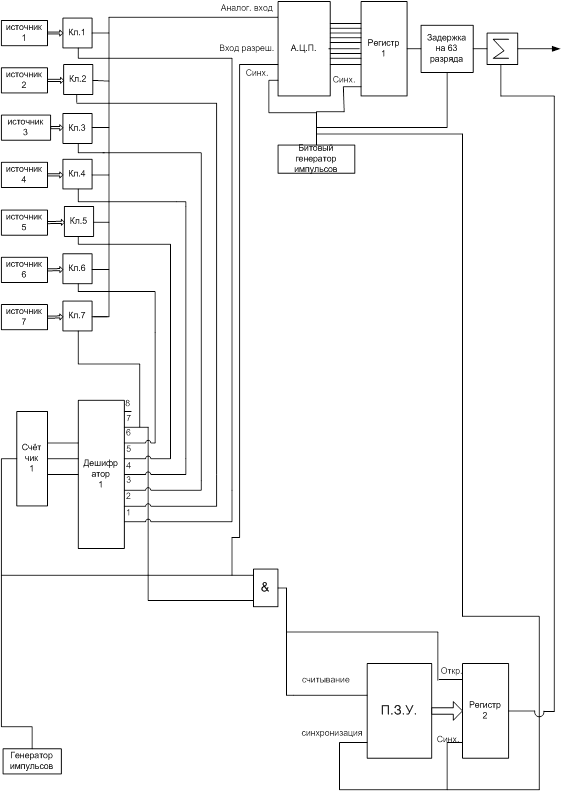
Рис. 2
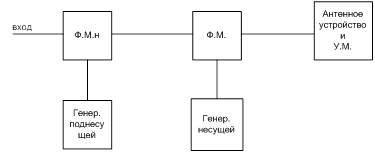
рис. 3
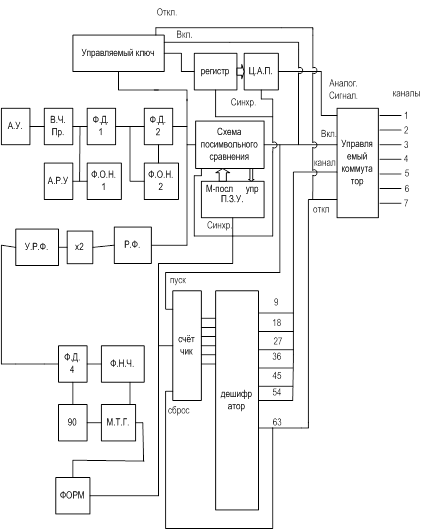
Принцип работы приёмника
Сигнал КИМ-ФМ-ФМ принимается приёмной антенной и поступает в высокочастотную часть приёмника. С её выхода сигнал поступает на фазовый детектор 1, опорное напряжение, для которого вырабатывает система формирования опорного напряжения 1.
Далее сигнал на поднесущей поступает на фазовый детектор 2 со своим формирователем опорного напряжения 2.
Работой приёмника управляет система посимвольной синхронизации. Её назначение – вырабатывать периодическую последовательность импульсов. Передний и задний фронты каждого синхронизирующего импульса должны совпадать с началом и концом каждого элементарного символа. Для этого сигнал К.И.М. поступает на режекторный фильтр, с фильтра выходит сигнал, частота которого в два раза меньше частоты следования элементарных символов в КИМ, но это только в том случае если в сигнале КИМ нули и единицы распределены равномерно, поэтому всегда есть ошибка. Далее частота сигнала удваивается, фильтруется и служит управляющим сигналом для схемы ФАПЧ, которая подстраивает местный тактовый генератор.
С выхода МТГ сигнал поступает на формирователь импульсов на выходе, которого и будет нужный синхросигнал. Сигнал с КИМ поступает на схему посимвольного сравнения на основе согласованного фильтра. На эту схему в качестве опорного сигнала подаётся та же 63 разрядная М-последовательность, что использовалась в качестве синхрослова на передающей стороне. Она хранится в ПЗУ. ПЗУ и схема сравнения синхронизируются от системы посимвольной синхронизации.
Как только схема сравнения примет нужную М-последовательность, на её выходе появится сигнал высокого уровня (ПУСК). Это означает что следующий бит принадлежит 1 кодовому слову. Выводом данных в соответствующие каналы управляет аналоговый управляемый коммутатор. Сигнал пуск поступает на управляемый ключ. Ключ замыкается и кодовое слово проходит в последовательном коде в регистр – преобразователь кода. С регистра кодовое слово в параллельном коде поступает в ЦАП. С выхода ЦАП аналоговый командный сигнал поступает на аналоговый управляемый коммутатор и в нужный канал.
Так как 7 каналов нужна схема переключения каналов. Она реализована на схеме пересчёта элементарных символов, состоящей из счётчика и дешифратора.
Как только со схемы сравнения выходит сигнал пуск, этот сигнал запускает счётчик импульсов. Нам известна разрядность кодовых слов, поэтому для формирования сигнала переключения канала можно использовать дешифратор.
После каждого 9 символа на соответствующих выходах дешифратора появляется сигнал высокого уровня, именно он поступает на управляемый коммутатор, и каналы последовательно переключаются.
Как только счётчик насчитает 63 импульсов, что означает что прошли все 7 кодовых слов, сигнал с выхода дешифратора сбрасывает и останавливает счётчик, так же этот сигнал отключает коммутатор и сбрасывает его схему переключения в начальное положение т.е. на 1 канал, и он же размыкает управляемый ключ.
Далее система ждёт прихода другого кадра и работа повторяется.
Контур управления
В общем случае контур управления состоит из нескольких контуров. Принято различать внутренние и внешние контура. Внутренние контура – это контуры стабилизации, а внешние контуры определяют движение летательного аппарата по траектории. Нас будет интересовать только внешний контур.
Внешний контур радиоуправления имеет ряд особенностей:
1. Обязательное наличие звена Автопилот-Снаряд (А-С). Входом этого звена является сигнал рассогласования DU либо командный сигнал Uk, а выходом - например угол определяющий направление скорости – γсн.
2. В контур должно входить радиозвено, которое определяет информационную связь между различными переменными, действующими в системе. Все радиотехнические устройства, с помощью которых измеряются координаты, передаются сигналы управления, объединяются в радиозвено. Выходным сигналом радиозвена является сигнал рассогласования.
3. Кинематическое звено. Оно не связано с какой либо аппаратурой, а определяет соотношения между различными координатами и параметрами движения. Это звено указывает связь между выходом звена Автопилот-Снаряд и координатами, являющимися входом радиозвена.
Будем считать, что у нас командное радиоуправление первого рода, тогда контур управления имеет вид:

Заключение
В данном курсовом проекте была разработанная командная радиолиния КИМ-ФМ-ФМ, которая полностью отвечает требованиям технического задания. Схемная реализация получилась простой и дешёвой, и что самое важное, может быть выполнена на отечественной элементной базе. Проект позволил мне изучить принципы построения командных радиолиний. Я изучил методы разделения каналов, которые в наше время просто необходимо знать радиоиженеру.
Список литературы
1. Варакин Л.Е. Системы связи с шумоподобными сигналами. /Москва
"Радио и связь" 1985г.
2. Пенин П.И. Системы передачи цифровой информации. /Москва "Советское радио" 1976.
3. Основы радиоуправления. под ред. В.А. Вейцеля и В.Н. Типугина М.: 1973 г.
4. Основы радиоуправления. под ред. В.А. Вейцеля и В.Н. Типугина М.: 1962 г.
5. Сазонов Д.М. Антенны и устройства СВЧ. /М.: Высшая школа 1998.
6.Учебное пособие "теоретические основы цифровой обработки сигналов" В.В. Езерский и В.С. Паршин /Рязань 1996г






