Курсовой проект
на тему: Проектирование приемника бортовой станции обнаружения
Работу выполнил Работу проверил
Студент гр. 4В-401С: преподаватель:
Буз К.А. Выборный В.Г.
Содержание
Введение 2
1. Расчет необходимой полосы пропускания линейного тракта 4
2. Расчет допустимого коэффициента шума приемника. 7
3. Выбор промежуточной частоты 8
4.Расчет стационарного режима системы АРУ 14
5. Расчет видеоусилителя 15
6. Принципиальная схема видиоусилителя 18
Структурная схема радиоприемного устройства 19
Список литературы 20
Введение.
Радиоприемное устройство состоит из приемной антенны, радиоприемника и оконечного устройства, предназначенного для воспроизведения сигналов. В радиоприемном устройстве решается ряд задач:
-преобразование электромагнитной волны в электрический сигнал, обеспечение пространственной и поляризационной селекции;
-выделение полученного сигнала из совокупности всех сигналов и помех, поступающих на вход радиоприемника;
-усиление полезного сигнала до уровня необходимого для нормальной работы детектора;
-детектирование;
-обработка принятых сигналов с целью ослабления воздействия помех искусственного и собственного происхождения.
Радиоприемные можно классифицировать по многим признакам рассмотрим некоторые из них.
По назначению можно выделить связные, вещательные, радиолокационные, навигационные и телеметрические. В данной работе рассматривается импульсная радиолокационная приемно-передающая станция обнаружение. Она излучает зондирующие радиоимпульсы с фиксированным периодом следования, длительностью импульсов, амплитудой и несущей частотой. Импульс, отраженный от цели, поступает на вход приемника, где он выделяется из множества сигналов и шумов, усиливается и подается на пороговое устройство, которое принимает решение о наличии или отсутствии цели.
По типу структурных схем существует четыре вида приемников: детекторные, регенеративные, сверхрегенеративные и супергетеродинные.
Радиолокационная станция (РЛС) – система обнаружения воздушных и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанные на излучении радиоволн и регистрации их отражений от объектов.
Приемный тракт проектируемой РЛС должен усилить принятые приемной антенной отраженные от цели сигналы, произвести фильтрацию, при которой обеспечивается максимальное различение полезных эхо-сигналов и помех, и извлечь из него полезную информацию.
Основными характеристиками приемника является чувствительность и избирательность. Существенное влияние на качество воспроизведения информации оказывают модуляционные помехи. Для борьбы с ними применяются различные методы, в частности системы автоматической регулировки.
В соответствии с ТЗ проектируемого приемника он должен обладать высокой чувствительностью, поэтому выбираем приемник супергетеродинного типа, который помимо высокой чувствительности обладает высокой избирательностью по соседнему каналу и достаточно большим усилением в линейной части приемника.
Импульсные РЛС являются наиболее распространённым видом станций. Большое преимущество этих РЛС заключается в том, что не просачивающаяся энергия передатчика, не очень сильные отраженные сигналы от расположенных на близких расстояниях местных предметов не поступают на вход приемника одновременно со слабыми эхо-сигналами от дальних цепей.
Расчет видеоусилителя.
Исходные данные:
1. Частота усиления f0 = 60 МГц
2. Входное напряжение Uвх = 0,165 В
3. Коэффициент усиления по напряжению = 27 дБ
4. Оконечная нагрузка RH= 75Ом, СН = 15 пФ
5. Напряжение питания – бортовая сеть 27 В
6. Условия эксплуатации: Токр = -50ºС … +60º С
Учитывая условия эксплуатации при большом значении пониженной и повышенной температуры, примем изменение напряжения бортовой питающей сети от 18 до 34 В с номинальным значением 27 В.
Целесообразно конструировать видеоусилитель не на транзисторах, а на микросхемах, что приведет к повышению надежности и более стабильной работы в указанных условиях.
Микросхема LT1207 полностью удовлетворяет нашим требованиям, выдавая на частоте 60 МГц ~17 дБ усиления по мощности, что соответствует 34 дБ по напряжению. Сохраняет свою характеристику при значении сопротивления нагрузки от 25 до 150 Ом, и емкости нагрузки от 5 до 20 пФ.
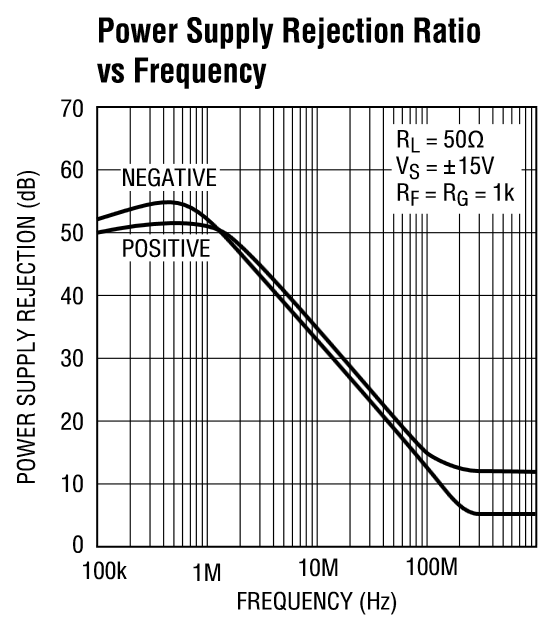
Для использования данной микросхемы необходимо применить стабилизатор напряжения на 15 В (рабочее напряжение питания микросхемы).
Применим стабилизатор MC78M15
Его характеристики приведены в таблице
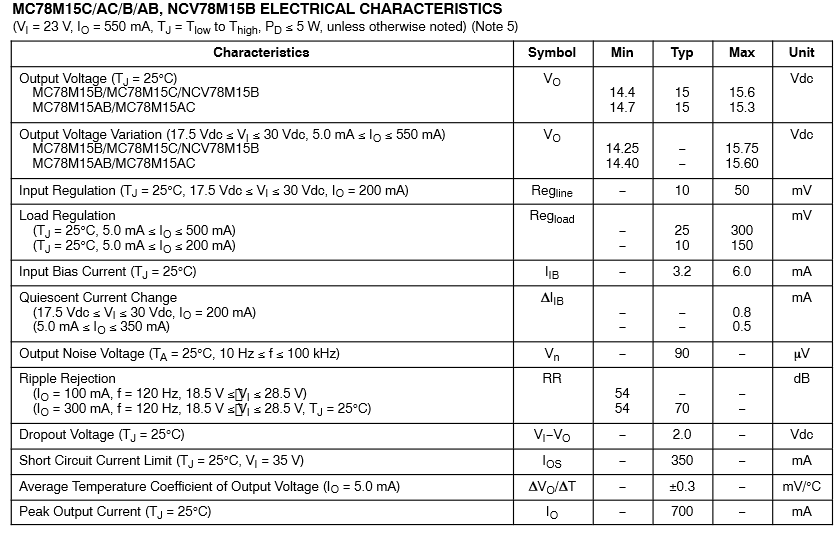
Данный стабилизатор удовлетворяет требованиям: напряжение стабилизации, выходной ток, температурный режим работы.
Список литературы.
1. Проектирование радиоприемных устройств, А.П. Сиверс, Советское радио, 1976
2. Методические указания по курсовому проектированию радиоприемных устройств, Бакалов В.П., Белоусов Н.Н., Выборный В.Г., издательство МАИ, 1999 г.
3. Конспект лекций
4. http://alldatasheets.com
Курсовой проект
на тему: Проектирование приемника бортовой станции обнаружения
Работу выполнил Работу проверил
Студент гр. 4В-401С: преподаватель:
Буз К.А. Выборный В.Г.
Содержание
Введение 2
1. Расчет необходимой полосы пропускания линейного тракта 4
2. Расчет допустимого коэффициента шума приемника. 7
3. Выбор промежуточной частоты 8
4.Расчет стационарного режима системы АРУ 14
5. Расчет видеоусилителя 15
6. Принципиальная схема видиоусилителя 18
Структурная схема радиоприемного устройства 19
Список литературы 20
Введение.
Радиоприемное устройство состоит из приемной антенны, радиоприемника и оконечного устройства, предназначенного для воспроизведения сигналов. В радиоприемном устройстве решается ряд задач:
-преобразование электромагнитной волны в электрический сигнал, обеспечение пространственной и поляризационной селекции;
-выделение полученного сигнала из совокупности всех сигналов и помех, поступающих на вход радиоприемника;
-усиление полезного сигнала до уровня необходимого для нормальной работы детектора;
-детектирование;
-обработка принятых сигналов с целью ослабления воздействия помех искусственного и собственного происхождения.
Радиоприемные можно классифицировать по многим признакам рассмотрим некоторые из них.
По назначению можно выделить связные, вещательные, радиолокационные, навигационные и телеметрические. В данной работе рассматривается импульсная радиолокационная приемно-передающая станция обнаружение. Она излучает зондирующие радиоимпульсы с фиксированным периодом следования, длительностью импульсов, амплитудой и несущей частотой. Импульс, отраженный от цели, поступает на вход приемника, где он выделяется из множества сигналов и шумов, усиливается и подается на пороговое устройство, которое принимает решение о наличии или отсутствии цели.
По типу структурных схем существует четыре вида приемников: детекторные, регенеративные, сверхрегенеративные и супергетеродинные.
Радиолокационная станция (РЛС) – система обнаружения воздушных и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанные на излучении радиоволн и регистрации их отражений от объектов.
Приемный тракт проектируемой РЛС должен усилить принятые приемной антенной отраженные от цели сигналы, произвести фильтрацию, при которой обеспечивается максимальное различение полезных эхо-сигналов и помех, и извлечь из него полезную информацию.
Основными характеристиками приемника является чувствительность и избирательность. Существенное влияние на качество воспроизведения информации оказывают модуляционные помехи. Для борьбы с ними применяются различные методы, в частности системы автоматической регулировки.
В соответствии с ТЗ проектируемого приемника он должен обладать высокой чувствительностью, поэтому выбираем приемник супергетеродинного типа, который помимо высокой чувствительности обладает высокой избирательностью по соседнему каналу и достаточно большим усилением в линейной части приемника.
Импульсные РЛС являются наиболее распространённым видом станций. Большое преимущество этих РЛС заключается в том, что не просачивающаяся энергия передатчика, не очень сильные отраженные сигналы от расположенных на близких расстояниях местных предметов не поступают на вход приемника одновременно со слабыми эхо-сигналами от дальних цепей.
Расчет необходимой полосы пропускания линейного тракта.
Все супергетеродинные приемники строятся из трех основных частей: линейного тракта, демодулятора, устройств управления. Линейный тракт является одинаковым для приемников различных типов. Он состоит из входной цепи(ВЦ), усилителя радиочастот(УРЧ), смесителя(С), гетеродина(Гет), преобразователя частоты, и усилителя промежуточной частоты(УПЧ).
При выборе схемы линейного тракта следует учитывать необходимую частоту пропускания. Ширина полосы пропускания складывается из ширины спектра радиочастот принимаемого сигнала Пс, доплеровского смещения частоты сигнала ΔfД, и запаса полосы, требуемого для учета нестабильности и неточностей настройки приемника Пнс
 (1.1)
(1.1)
Где:  - ширина спектра принимаемого сигнала
- ширина спектра принимаемого сигнала
 - доплеровское смещение частоты
- доплеровское смещение частоты
 - нестабильности и неточностей настройки приемника Пнс
- нестабильности и неточностей настройки приемника Пнс
 (1.2)
(1.2)
 (1.3)
(1.3)
Где:  -нестабильность частоты сигнала
-нестабильность частоты сигнала
 -нестабильность частоты гетеродина
-нестабильность частоты гетеродина
 -неточность настройки частоты гетеродина
-неточность настройки частоты гетеродина
 -неточность настройки частоты УПЧ
-неточность настройки частоты УПЧ
Доплеровское смещение частоты определяется по формуле:
 (1.4)
(1.4)
Где:  –радиальная скорость перемещения объекта, отражающего зондирующие сигналы относительно РЛС
–радиальная скорость перемещения объекта, отражающего зондирующие сигналы относительно РЛС
fС – рабочая частота. Так же задана техническим заданием и равна 9,7 ГГц
с – скорость света. Для удобства расчета сделаем перевод из м/с в км/с. В этом случае она составит 

Нестабильность частоты определяется по формуле:
 (1.5)
(1.5)

Неточность настройки частоты УПЧ может составлять от 0.0003 до 0.003 от промежуточной частоты, примем  .
.
Неточность настройки частот гетеродинапримем равным 
Нестабильность частоты сигнала в ТЗ не указана, поэтому возьмем значение 
Полагая, что нестабильность генераторов на диодах Ганна равна нестабильности генераторов на отражательных клистронах, а также на ЛОВ примем:
Нестабильность частоты гетеродина:

Запас полосы пропускания:
(1.6)

Имея все необходимые значения, определим требуемую полосу пропускания линейного тракта по формуле (1.1):

Для обеспечения необходимой чувствительности приемника и сужения его полосы пропускания необходимо осуществить автоподстройку частоты гетеродина под частоты приема с помощью системы АПЧ. Существуют несколько видов систем АПЧ: частотная (ЧАПЧ) и фазовая (ФАПЧ). Будем использовать частотную автоподстройку частоты.
При использовании фазовой автоподстройки КЧАП = 30, и
 (1.7)
(1.7)

При использовании автоподстройки частоты гетеродина полосу пропускания входных цепей и УРЧ (преселектора) Ппр нужно определять из соотношения
 (1.8)
(1.8)







