В XIX в. изобретатели предложили ряд усовершенствованных центробежных регуляторов скорости. Так, английский математик и астроном Джордж Эри (Georg B. Airy) построил в 1840 г. телескоп с автоматическим приводом по азимуту и углу места с центробежным фрикционным регулятором, обеспечивающим равномерный поворот со скоростью вращения Земли.
На Рис.8.12а показан общий вид этого телескопа, а на Рис.8.12б — в упрощенном виде принцип действия регулятора привода без редукторов. Труба телескопа 1 поворачивается через блок механических редукторов 2 двигателем в виде барабана с грузом 3, снабженным фрикционным регулятором с расходящимися шарами 4, трущимися о поверхность неподвижной муфты 5 в случае, когда скорость вращения телескопа превышает заданную.
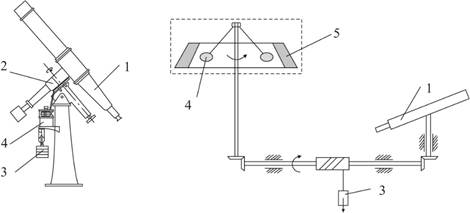
Рис.8.12. а) Телескоп Эри; б) Фрикционный регулятор Эри. 1 — труба телескопа; 2— блок механических редукторов; 3 — двигатель; в виде барабана с грузом; 4 — фрикционный регулятор с расходящимися шарами; 5 — муфта
В данном регуляторе увеличение момента трения в опорах телескопа компенсируется уменьшением трения в регуляторе, однако это возможно лишь при некотором снижении скорости вращения, т. е. появлении статической ошибки регулирования.
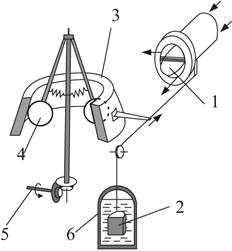
Рис.8.13. Регулятор Дженкина (1 — заслонка; 2 — груз; 3 — муфта; 4 — подпружиненные шары; 5 — вал; 6 — катаракт)
Более совершенным является регулятор паровой машины английского инженера Флиминга Дженкина (Fleeming Jenkin), построенный в середине XIX в. (Рис.8.13).
В этом случае заслонка 1, регулирующая подачу пара в машину, поворачивается двумя устройствами: грузом 2, аналогичным двигателю Эри, и муфтой 3 фрикционного регулятора с подпружиненными шарами 4, приводимого во вращение от вала машины 5. В отличие от регулятора Эри, муфта 3 подвижная. Она прикрывает заслонку 1 тогда, когда шары вовлекают муфту во вращение.
Таким образом, когда скорость машины больше заданной, шары закрывают заслонку, а когда меньше, заслонка открывается грузом. При этом регулятор не имеет статической ошибки, поскольку, например, при увеличении нагрузки на машину и падении ее скорости груз приоткрывает заслонку до тех пор, пока скорость машины не вернется к заданному значению.
Регулятор Дженкина снабжен, как это видно на Рис.8.13, еще одним весьма важным регулирующим элементом 6, называемым катарактом, в виде цилиндра с маслом, в котором движется груз. Катаракт был применен впервые в регуляторе Эри. Было обнаружено, что введение такого элемента, который со временем стал весьма популярным, существенно улучшает плавность и точность регулирования скорости. По современной терминологии катаракт — это устройство, формирующее отрицательную обратную связь по скорости, называемую тахометрической обратной связью, являющуюся мощным средством динамической коррекции систем автоматического управления.
Другие примеры успешных регуляторов, изобретенных в XIX в., приведены в обзоре.
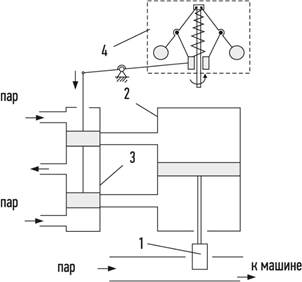
Рис.8.14. Регулятор непрямого действия (1 — заслонка; 2 — серводвигатель; 3 — золотниковый распределитель; 4 — центробежный регулятор с пружиной)
Все рассмотренные выше регуляторы являются регуляторами прямого действия, поскольку чувствительный элемент оказывает прямое силовое воздействие на заслонку или объект управления. Однако это возможно лишь в регулировании объектов малой мощности. Действительно, повернуть, например, затворы большой гидротурбины с помощью центробежного регулятора вряд ли удастся.
Французский инженер Джозеф Фарко (Joseph Farcot) предложил в 1873 г. ввести в регулятор дополнительный исполнительный элемент, названный им серводвигателем или сервомотором, усиливающим мощность чувствительного элемента. Такие регуляторы стали называть регуляторами непрямого действия. Пример такого регулятора приведен на Рис.8.14. В данном случае заслонка 1 двигается дополнительным паровым цилиндром – серводвигателем 2, золотниковый распределитель 3 которого управляется центробежным регулятором 4 с пружиной.
Рис. 8.15 Жан Жозеф Леон Фарко (23 июня 1824 - 19 марта 1908), французский инженер, изобретатель и промышленник. Автор пионерских изобретений в области сервомеханики и регуляторов прямого действия, лежащих в основе всех современных САР, рыцарь Почетного легиона
Нетрудно убедиться в том, что введение серводвигателя не только увеличивает выходную мощность чувствительного элемента, но и обеспечивает, в принципе, нулевую ошибку регулирования скорости, на которую настроен чувствительный элемент. Действительно, заслонка не движется только тогда, когда золотник перекрывает впускные каналы цилиндра. Регулятор настраивается таким образом, чтобы этому положению золотника соответствовала заданная скорость вращения шаров.
При увеличении момента нагрузки скорость машины падает, золотник смещается вверх и сервомотор поднимает заслонку до нового положения, при котором скорость машины будет в точности равна заданной. По современной терминологии применение серводвигателя в регуляторе непрямого действия означает введение интегратора, превращающего статическую систему в астатическую.
Все рассмотренные регуляторы с обратной связью используют принцип регулирования по отклонению или по ошибке. Современная терминология относит их к П- или ПИ-регуляторам. Однако в XIX в. появились и другие устройства: с регулированием по возмущению и с регулированием по производной от ошибки. Регулирование по возмущению или по нагрузке (принцип инвариантности Понселе) было предложено в 1830 г. французским математиком и инженером Жаном-Виктором Понселе (Jean-Victor Poncelet), а регулирование по производной выполнял так называемый инерционный регулятор, изобретенный в 1845 г. братьями Вернером и Вильгельмом Сименсами (Verner, Wilhelm Siemens) в Германии.
Рис.8.16 Жан-Виктор Понселе (1778 – 1867), президент Парижской АН, член-корреспондент Петербургской АН.
Принципы построения и конструкции различных регуляторов детально анализировались в лекциях 1846 г. знаменитого профессора Петербургских железнодорожного и технологического институтов Николая Федоровича Ястржембского.
К концу XIX в. стали появляться и первые электромеханические регуляторы. Примером может служить дифференциальный регулятор дуговых ламп для освещения московских площадей, построенный известным российским электротехником Владимиром Николаевичем Чиколевым в 1874 г.

Рис.8.17 Владимир Николаевич Чиколев (1845 —1898) — русский электротехник.
Схема регулятора, показана на Рис.8.18, где штриховыми линиями обозначены соединительные провода.
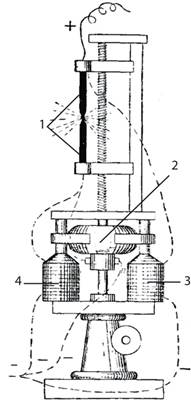
Рис.8.18. Регулятор Чиколева (1 — электроды; 2 — обмотка якоря; 3 и 4 — обмотки возбуждения).
Электроды 1 дуговой лампы сближаются через винтовую передачу электродвигателем постоянного тока с обмоткой якоря 2 и двумя обмотками возбуждения 3 и 4, причем обмотка 3 подключается прямо к источнику питания, а обмотки 2 и 4 соединяются с нижним электродом. Обмотки 3 и 4 создают потоки возбуждения двигателя противоположных знаков, причем их действие уравновешивается при нормальном зазоре между электродами. При увеличении зазора его сопротивление растет, а ток падает, что приводит к преобладающему действию обмотки 4 и вращению двигателя в сторону сближения электродов. При чрезмерном сближении электродов будет преобладать действие обмотки 3, обеспечивающей вращение двигателя в противоположную сторону и увеличение зазора.
Таким образом, новый этап развития систем автоматики, начавшийся с изобретения и внедрения паровой машины, отличался следующими основными особенностями:
· Паровая машина потребовала ряда автоматических устройств, таких как клапан давления, регулятор уровня, золотниковый парораспределитель и регулятор скорости вращения, что поставило перед изобретателями первые серьезные задачи автоматического управления.
· Наибольшее распространение получили центробежные регуляторы скорости прямого действия, в которых чувствительный элемент обладал непосредственным воздействием на заслонку (регулятор Уатта) либо создавал переменный нагрузочный момент трения (регулятор Эри).
· Эти регуляторы имели пропорциональный (П) закон регулирования, вызывающий статическую ошибку, устраняемую в регуляторе Дженкина механическим интегратором, обеспечивающим пропорционально-интегральный (ПИ) закон регулирования.
· До середины XIX в. были предложены и другие законы регулирования: по возмущению (принцип Понселе) и по производной от ошибки (регулятор Сименсов).

Рис.8.19. Эрнст Ве́рнер фон Си́менс (1816 – 1892), выдающийся немецкий инженер, изобретатель, член-корреспондент СПбАН, промышленник, основатель фирмы Siemens, общественный и политический деятель.
· В регуляторах непрямого действия, первый из которых был создан Фарко, чувствительный элемент управлял дополнительным сервомотором заслонки, что не только повышало мощность регулятора, но и обеспечивало астатизм регулирования скорости.
· Появились регуляторы и других машин, например, фрикционный регулятор вращения телескопа Эри, электромеханический регулятор дуговой лампы Чиколева и др.
Ко второй половине XIX в. было известно уже большое число различных достаточно сложных конструкций регуляторов, заложивших основы создания замкнутых систем автоматического управления в современном понимании этого термина. Однако отсутствовали не только методики расчета, выбора параметров и настройки, но и теоретическое понимание происходящих в них процессов регулирования.
Как будет показано в следующей статье, широкое внедрение паровых и других машин, а также повышение точности и быстродействия их регулирования выявило проблему устойчивости регулятора, вызванную противоречием между требованиями точности и устойчивости работы машины, а также наличием в ней нелинейных элементов.
Если в XVII в., когда большинство людей работали от 60 до 70 ч в неделю, чтобы свести концы с концами, и вопрос о том, что делать со свободным временем, не возникал, то уже к XX в. для промышленности стала приемлемой 40-часовая рабочая неделя. Многие рабочие стали иметь в несколько раз больше свободного времени и по мере распространения автоматизации индивидуальная производительность возросла, количество человеко-часов, затрачиваемых на конкретную работу, уменьшилось. Экономистами прогнозируется возможность введения в промышленности 30-часовой рабочей недели.
Научно-техническая революция привела к трансформации многих черт общества. Запрет детского труда и законы, регулирующие заработную плату, продолжительность и условия труда, эволюционировали так, чтобы защитить человека от экстремальных воздействий производственной среды. Автоматизация освобождает людей от производственной зависимости. Рабочая сила перемещается с заводов в учреждения (а функции самих учреждений все более переходит к работе на дому), что делает из рабочего не участника технологического процесса, а наблюдателя, контролера, — «постиндустриальные трудящиеся».
Искусство и культура традиционно зависели от патронажа привилегированных социальных слоев. С появлением все большего свободного времени и денежных средств у широких слоев населения культура и искусство стали занимать в жизни людей более заметное место.
Автоматика XX века
Новый этап в развитие автоматического управления характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматического контроля и коррекции. 50-е гг. XX в. ознаменовались появлением сложных систем управления производственными процессами и промышленными комплексами на базе электронных управляющих вычислительных машин.

Рис.8.20. Один из наиболее распрстранённых в СССР управляющий вычислительный комплекс СМ-2М, 80 –годы XX века.
Создание ЭВМ дало новый толчок для развития автоматической техники, так как их вычислительная мощь позволила автоматизировать не только «старые» производственные задачи, но и внедрять автоматизацию в новые сферы человеческой деятельности. Симбиотическая связь ЭВМ и автомата уже не позволяет их отделить друг от друга: тенденция развития одного компонента тут же влечет развитие в другой области, и наоборот. Для нужд производства создаются все более совершенные средства автоматизации, которые требуют все более сложных вычислительных средств. Это влечет за собой развитие управляющего комплекса автоматики и даже создание нового математического аппарата (появление кибернетики вообще и теории автоматического управления в частности), а это в конечном итоге приводит к тому, что новые разработки тут же применяются в различных областях общественного производства.
Использование атомной энергии предъявляет новые требования по точности управления и скорости реакции, которые находят свою реализацию в системах «жесткого» реального времени.
Другим толчком для бурного развития автоматов стало освоение ближнего космического пространства. Причём, пионерами в исследовании космоса и другихпланет были выдающиеся учёные и инженеры С. П. Королём и В. П. Глушко. Прричём, если освоение Луны аппаратами происходило при помощи управления с Земли (проекты «Луна» СССР и «Surveyor» США), то уже для исследования поверхности Венеры были использованы автоматические станции (проекты «Венера» СССР и «Mariner» США), причём первым запустил свои исследовательские станции СССР. Дальнейшее исследование Солнечной системы происходило с помощью автоматических станций (например, проект «Voyager» США) и марсоходами «Опортьюнити» (2004) и «Кьюриосити» (2012) и «Инсайт» (2018). (США), так как попытки СССР произвести мягкую посадку аппарата на Марс (1971 -1974 годы.) закончились неудачно.

Рис.8.21. Первый луноход на Луне,1970 СССР.

Рис. 8.22. 17 августа 1970 года, была запущена советская АМС «Венера-7» — первый космический аппарат, осуществивший передачу данных с поверхности Венеры (гна фото). Кроме того, «Венера-7» стала также и первым космическим кораблем, передавшим данные после приземления на другую планету.

Рис.8.23. Серге́й Па́влович Королёв (1906 - 1966) —ключевая фигура мировой истории освоения человеком космоса, основатель практической космонавтики
академик АН СССР.

Рис.8.24. Валенти́н Петро́вич Глушко́ (1908—1989) — советский инженер и учёный в области ракетно-космической техники. Один из пионеров ракетно-космической техники, основоположник советского жидкостного ракетного двигателестроения, академик АН СССР.

Рис.8.25. Автоматический зонд Вояджер-2 - первый аппарат, покинувший Солнечную систему (США).
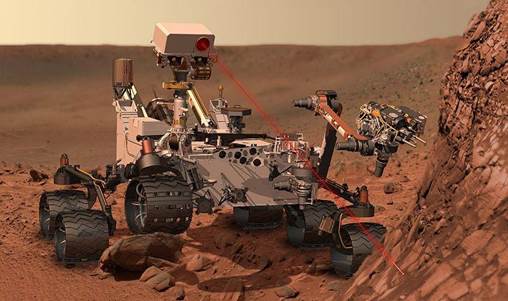
Рис. 8.26. Марсоход третьего поколения «Кьюрио́сити» (с английского любопытство, любознательность). Марсоход представляет собой автономную химическую лабораторию.
К концу XX в. автоматизация проникает во все сферы человеческой жизни. Появляются автоматизированные системы менеджмента (автоматизированные системы управления предприятием, АСУП) и как составной части системы документооборота (системы автоматизации документооборота, САД). Это позволяет упростить ведение бухгалтерского учета, облегчает планирование производства, позволяет оптимизировать предпринимательскую деятельность для получения большей прибыли и избавится от издержек, связанных с содержанием излишнего управленческого аппарата.

Рис.8.27. Виктор Михайлович Глушков (1923 – 1982). Выдающийся учёный, один из идеологов Общегосударственной автоматизированной системы управления экономикой СССР, создатель уникальных ЭВМ семейства «Мир». Создатель института кибернетики (имени В. М. Глушкова). Студент Новочеркасского политехнического института и Ростовского университета (1943-1948 г.г.)
Начиная с внедрения конвейерных линий, в машиностроении внедряются системы автоматического обработки металла. Объединение ЭВМ и металлообрабатывающего станка порождает станок с численным программным управлением (ЧПУ), который позволяет без вмешательства человека устанавливать заготовку, обрабатывать ее различными инструментами и отправлять готовое изделие на дальнейшую обработку. Увеличение точности сервомеханизмов, их компактность и безынерционность приводят к созданию манипулятора («механической руки»). Развитие манипуляторов привело к созданию промышленных роботов, представляющих собой высокоточный манипулятор, оснащенный необходимым инструментарием (сварочная головка, захват, слесарный инструмент и т. п.). Промышленные роботы позволили автоматизировать процессы обработки, монтажа и сборки изделий.

Рис.8.28. Роботизированная ячейка с фрезерным обрабатывающим центром.

Рис.8.29. Евгений Иванович Юревич, основатель отечественной робототехники, руководитель ряда пионерских космических разработок, автор учебников по теории автоматического управления, создатель ЦНИИ РТК, С. - Петербург, СССР.
Усложнение техники влечет за собой коренное изменение и в образовании. Информационные системы, программирование и машинные языки привели к прорыву в теории и практике обучения. Автоматизация начинает применяться и в сфере образования как на стадии оценки знаний, так и на стадии непосредственного преподавания (автоматизированные обучающие системы, АОС). Сюда можно отнести дистанционное обучение и компьютерное тестирование знаний. В последнее время появилась тенденция внедрения в образовательный процесс компьютерных технологий, которые позволяют в некотором роде заменить живого учителя — концепция «электронного учителя».
Автоматизация библиотечного и архивного дела (автоматизированные библиотечно-информационные системы, АБИС) ускоряет доступ к необходимой информации, находящейся в библиотечных и архивных фондах, а постепенный переход от бумажных носителей к электронным делает этот процесс еще проще — создается концепция электронных библиотек и архивов.
Незаменимым становится применение автоматов в агрессивных, вредных для человека средах (высокий уровень радиации, токсичность среды, экстремальные значения давления и температуры и т. д.) или в чрезвычайных ситуациях (различного рода природные и техногенные аварии, террористическая угроза и т. п.). Всё больше автоматы находят свое применение в военно-оборонной среде (различного рода роботы-сапёры, беспилотные летательные аппараты-разведчики и т. д.). Большую роль в ликвидации последствий Чернобыльской аварии сыграли роботы, соданные в ЦНИИ РТК под руководством Е.И. Юревича. Всего в течение двух месяцев было разработано, изготовлено и отправлено в район аварии 15 роботов.

Рис.8.30. Гусеничный робот-разведчик РР-Г1, (ЦНИИ РТК, СССР).
Но было бы неправильным утверждать, что автоматика используется исключительно только в производственной и научной среде. Автоматика прочно завоевала свои позиции и в быту. Имеется множество автоматических бытовых приборов, облегчающих уборку помещений, стирку белья, приготовление пищи, мытью грязной посуди и т. п.
Развитие техники в этом направление приводит к появлению устройств, которые выполняют необходимые работы по дому самостоятельно, например, пылесосы-роботы фирмы iRobot автоматически убирают помещения.
Массовое внедрение Интернет-технологий позволило объединить не только персональные компьютеры, но и бытовую технику, имеющую сетевые модули ввода/вывода с поддержкой стека протоколов TCP/IP. Так, например, холодильник «Screenfridge» фирмы Electrolux может самостоятельно делать заказы необходимых продуктов питания посредством сети Интернет.
Внедрение сетевых технологий в домашний обиход приводит к понятию «умный дом». Это концепция позволяет не только оптимизировать расход электроэнергии или воды, следить за поддержанием комфортного микроклимата в помещениях дома или обеспечивать безопасность, но и производить это удаленно через сеть Интернет через защищенный VPN-канал.
8.5 Контрольные вопросы
1. Что такое автомат?
2. Опишите принципы действия автоматов Герона и Ктезибия.
3. Принцип работы интегратора Ктезибия.
4. Раскройте принцип действия регулятора Уатта и термостата Дреббеля.
5. Как работало автоматическое устройство с обратной связью в водяных часах Ктезибия?
6. В чём сущность работы и роль катаракта в регуляторе Дженкина?
7. Опишите принцип работы регулятора Фарко и роль в нём сервомотора сервомотором.
8. Приведите пример и опишите принцип работы регулятора непрямого действия.
9. В чём суть «принципа Понсело».
10. Приведите пример регулятора, реализующего регулирование по возмущению или нагрузке?
11. Кто первым реализовал регулирование по производной от ошибки?
12. Какой принцип регулирования реализован в регуляторе Чиколева?
13. Какие страны осуществили первую мягкую посадку мобильных роботов на Луну, Венеру и Марс?
14. Назовите пионеров исследования космоса и планет солнечной системы автоматическими межпланетными сианциями.
15. Какой зонд первым покинул пределы Солнечной системы?






