

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Топ:
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Интересное:
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Число полос движения определяется из сопоставления ожидаемой часовой интенсивности движения по дороге и пропускной способности одной полосы движения по формуле:
 ,
,
где n – число полос движения;
Nч - часовая интенсивность движения, авт./час;
Nп - пропускная способность полосы движения, авт./час.
С учетом неравномерности движения в течение суток:
Nч=N/10=2911/10=291,1 авт/час
Пропускной способностью полосы движения называется количество автомобилей, которые могут проехать по ней в течение одного часа при обязательном условии обеспечения безопасности движения. В курсовой работе используется упрощенная динамическая модель транспортного потока, согласно которой автомобили перемещаются по полосе движения друг за другом, без обгона и с постоянной скоростью.
В этом случае пропускную способность полосы движения можно определить по формуле:  авт/час.,
авт/час.,
Где v = 100 - расчетная скорость движения, км/час;
=,5- коэффициент сцепления;
f = 0,02 - коэффициент сопротивления качению;
l2 = 15 - длина автомобиля, м;
lо = 10- запас расстояния, м;
Кэ = 1,4- коэффициент эксплуатационного состояния тормозов.
Определение ширины проезжей части, полосы движения и земляного полотна.
Ширина проезжей части b вычисляется по формуле:
b = bп n = 3,55 2 = 7,1 м.,
где bп - ширина полосы движения, м (рис. 1.1)
n = 2 - количество полос движения.
Ширина полосы движения:
bп = а + 2 х =2,75 + 2 0.4 = 3,55 м.,
где а = 2,75 - ширина кузова автомобиля, м;
х - расстояние от кузова до обочины или смежной полосы движения, м;
Величина х устанавливается по эмпирической зависимости:
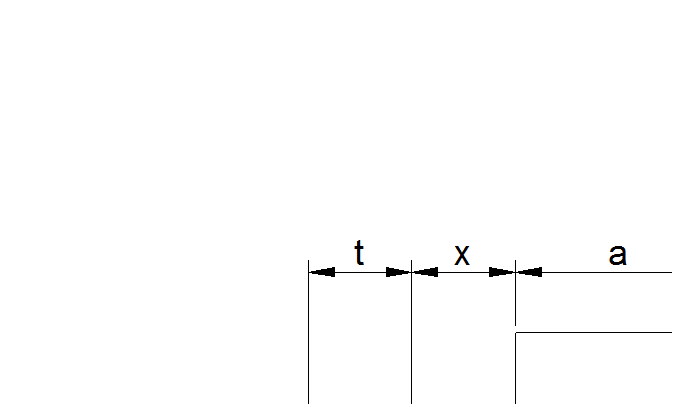 х = 0.004 v = 0.004 100 = 0,4 м
х = 0.004 v = 0.004 100 = 0,4 м
Ширина земляного полотна:
В = b + 2 t = 7,1 + 2 2,5 = 12,1 м.,
где t = 2,5 м - ширина обочины, принимаемая по СНиП(табл.4).
|
|
Рис. 1.1. Определение ширины полосы движения
3.3 Определение наименьших радиусов кривых в плане
Проезжая часть автомобильной дороги на кривой в плане может иметь либо двухскатный поперечный профиль, либо односкатный, называющийся виражом. Наименьший радиус кривой в плане, при котором применяется двухскатный профиль при данной расчетной скорости движения находится по формуле:

где n = 0,1 -коэффициент сцепления колеса с дорогой в поперечном направлении;
in = 20 ‰ - поперечный уклон проезжей части.
При назначении радиусов поворота, меньших RH, необходимо предусматривать устройство виража. При значительном уменьшении радиуса поворота центробежная сила возрастает настолько, что вираж уже не обеспечивает устойчивости автомобиля против бокового скольжения. Это наименьшее значение радиуса поворота автомобильной дороги с виражом вычисляется по формуле:
 ,
,
где iB = 40 ‰ - уклон виража (СНиП, п.3.18).
При устройстве виража длина отгона L определяется по выражению:
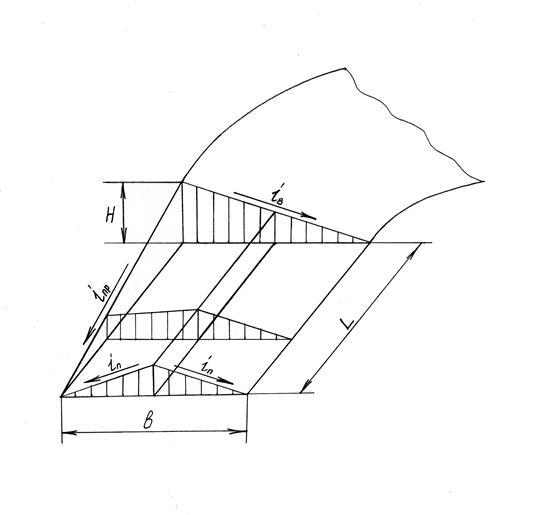
 ,
,
где i пр = 0.02 -дополнительный продольный уклон отгона виража (СНиП, п.3.29).
Рис. 1.2. Схема отгона виража
Видимость пути
Для обеспечения безопасности движения с расчетной скоростью водитель должен видеть дорогу на определенном расстоянии, называемом расстоянием видимости поверхности дороги (рис. 1.3), которое равно:
SВД = l1+ST+l0 = 27,8 + 106 + 10 = 143,8 м,
где l1=v/3,6 - путь, проходимый автомобилем за время реакции водителя, равное 1сек;
Sт - длина тормозного пути:
lо - запас расстояния (5-10м)


Рис. 1.3. Схема видимости поверхности дороги
|
|
|

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!