Устройства робокарного транспортирования предназначены для перемещения заготовок или деталей между участками либо для транспортировки на склад. В момент опускания на платформу груза формируется временная задержка, и робокара спустя некоторое время начинает движение прямо. Тележка движется по проложенному в полу магнитопроводу с помощью индукционой системы наведения. При отклонении от заданной траектории появляется разница между сигналами датчиков и рулевое колесо робокары поворачивается в сторону датчика с большим сигналом, пытаясь тем самым свести рассогласование к нулю. Движение продолжается до тех пор, пока робокара не достигнет упора, задействующего бесконтактный концевой выключатель. При наезде на препятствие питание основного двигателя отключается механически. Движение в обратном направлении начинается в момент, когда груз убирают по истечении временной задержки.
Описание микропроцессорного комплекта
В данном проекте используется процессор 1882ВЕ53У ( в корпусе 5133.48-3). Это внутрисистемно программируемый 8–разрядный микроконтроллер с ПЗУ типа Flash. Предназначен для применения во встроенных системах управления и обработки информации.
Обладает характеристиками:
• Тактовая частота 24 МГц
• Регистровое ОЗУ 256х8 бит
• Встроенная память программ 12Кх8 бит (Flash)
• Встроенная память данных 2Кх8бит (ЭСППЗУ)
• Последовательный порт ввода/вывода (UART)
• Последовательный периферийный интерфейс (SPI)
• Сторожевой таймер (WDT)
Основные параметры
Таблица 1.
| Параметр
| Обозначение
| Значение (число)
| Единица
измерения
|
| Разрядность АЛУ
| NALU
| 8
| бит
|
| Количество портов ввода/вывода
|
| 4х8
|
|
| Адресуемая память программ
| QPM
| 64
| Кбайт
|
| Адресуемая память данных
| QDM
| 64
| Кбайт
|
| Число команд
| nINS
| 111
|
|
| Время выполнения команд
|
|
| мкс
|
| - сложение, регистр-регистр
| tSM,RGRG
| 0.5
|
|
| - сложение, регистр-память
| tSM,RGM
| 1.0
|
|
| - умножение/деление
| tMPL/DIV
| 2.0
|
|
| Количество источников прерываний
| nINR
| 9
|
|
| Количество таймеров/счетчиков
| nТ/СТ
| 3х16
|
|
| Напряжение питания
| UCC
| 5 (± 10 %)
| В
|
| Ток потребления в активном режиме при fC= 12 МГц
| IOCC1
| 10
| мА
|
| Диапазон рабочих температур
| TA
| -60/+85
| °С
|
Рис. 2. Структурная схема микроконтроллера
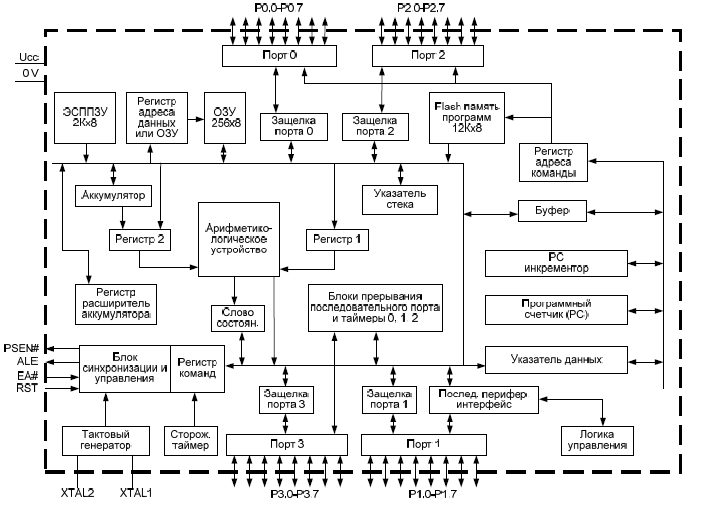
Рис. 3. Схема расположения выводов в корпусе 5133.48-3

Рис. 4. Условное графическое изображение микросхемы

Функциональное назначение выводов Таблица 2.
| Номер вывода
| Обозначение
вывода
| Функциональное назначение вывода
|
| 1-6, 9, 10
| P1.0-P1.7
| 8-разрядный двунаправленный порт Р1с дополнительными функциями:
|
| 1
| P1.0
| вход таймера/счетчика 2: T2
|
| 2
| P1.1
| вход триггера выборки-перезагрузки таймера/счетчика 2: T2EX
|
| 5
| P1.4
| вход выбора последовательного периферийного интерфейса ППИ: SS#
|
| 6
| P1.5
| вход/выход данных ППИ: MOSI
|
| 9
| P1.6
| вход/выход данных ППИ: MISO
|
| 10
| P1.7
| вход/выход тактового сигнала ППИ: SCK
|
| 11
| RST
| сигнал общего сброса
|
| 12-17, 20, 21
| P3.0-P3.7
| 8-разрядный двунаправленный порт P3 с дополнительными функциями:
|
| 12
| P3.0
| последовательные данные приемника - RХD
|
| 13
| P3.1
| последовательные данные передатчика - TХD
|
| 14
| P3.2
| вход внешнего прерывания - 0-INT0#
|
| 15
| P3.3
| вход внешнего прерывания - 1-INT1#
|
| 16
| P3.4
| вход таймера/счетчика 0: - T0
|
| 17
| P3.5
| вход таймера/счетчика 1: - T1
|
| 20
| P3.6
| выход стробирующего сигнала при записи во внешнюю память данных: - WR#
|
| 21
| P3.7
| выход стробирующего сигнала при чтении из внешней памяти данных: - RD#
|
| 22
23
| XTAL2
XTAL1
| выводы для подключения кварцевого резонатора
|
| 24
| 0 V
| общий вывод
|
| 26-30, 32, 33, 34
| P2.0-P2.7
| 8-разрядный двунаправленный порт P2. Выход адреса А8-А15 в режиме работы с внешней памятью
|
| 35
| SCK
| сигнал синхронизации
|
| 36
| ALE
| выходной сигнал разрешения фиксации адреса. *При программировании РПЗУ подается сигнал PROG#
|
| 37
| EA#
| блокировка работы с внутренней памятью.
При программировании РПЗУ подается сигнал UBPRB
|
| 38-41,
44-47
| P0.7-P0.0
| 8-разрядный двунаправленный порт P0. Шина адреса/данных при работе с внешней памятью
|
| 48
| UBCCB
| вывод питания от источника напряжения плюс 5 В
|
| Примечания
1 Выводы 7, 8, 18, 19, 25, 31, 42, 43 не задействованы.
|
МП имел 16 выводов адресных линий и восемь для подсоединения шины данных. Располагая дополнительными возможностями 1882ВЕ53У в корпусе 5133.48-3 с 48 выводами не требует дополнительных выводов для обеспечения всех входов и выходов; по этой причине выводы с 12 по 19 использованы как равноценные линии шины адреса/данных (P0.7 – P0.0). Поэтому этот микропроцессор называется устройством с мультиплексированной шиной данных/адреса. Адресные шины восьми младших разрядов разделяют выводы с линиями шины данных. Мультиплексировать – значит выбирать линии поочерёдно. При таких определениях мультиплексировать шину адреса/данных означает использовать сначала шину для передачи адреса, затем использовать её же для выдачи или получения данных. Микропроцессор 1882ВЕ53У снабжён специальным сигналом для того, чтобы информировать периферийные устройства, производит ли мультиплексированная шина операции на адресной шине или на шине данных. Это специальный сигнал, называемый сигналом разрешения адреса (ALE).
Необходимо отметить, что выводы мультиплексированной шины двунаправлены или могут быть в положении трёх состояний. Вывод управления ALE является выходным.
МП 1882ВЕ53У имеет 16 адресных линий. Восемь старших разрядов выведены на выводы P2.0–P2.7.. Эти выводы являются выходами или могут быть в состоянии высокого сопротивления.
МП имеет 16-разрядный счётчик команд и защёлку адреса, которая загружает специализированную адресную (P2.0–P2.7) и мультиплексированную (P0.7 – P0.0) шины. Параллельные данные входят в МП и покидают его через (P0.7 – P0.0). Эта шина передаёт адрес, когда линия управления ALE получает Н-сигнал, и данные – когда L-сигнал.
По 8-разрядной внутренней шине входящие и выходящие данные вводятся внутрь устройства. Они могут поступать с внутренней шины данных в следующие части МП:
– 8-разрядный аккумудятор;
– регистр временного хранения;
– индикаторы;
– регистр команд;
– устройство управления;
– 16-разрядный указатель стека;
– 16-разрядный счётчик команд;
– 8-разрядный буфер адреса/данных.
Арифметико-логическое устройство загружается двумя 8-разрядными регистрами (аккумулятором и регистром временного хранения), как в типовом МП.
Регистр команд связан с блоком синхронизации и управления, который определяет текущую команду, требуемую микропрограмму или следующий машинный цикл, а затем информирует схему управления и синхронизации о последовательности действий. Эта схема координирует действия МП и периферии.
Также регистр команд связан со сторожевым таймером, который подает сигнал о перезагрузке системы в случае зацикливания.





