

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Сведения об ускорении необходимы для того, чтобы найти закон изменения скорости от времени. Например, зависимость скорости от времени находится как неопределённый интеграл от ускорения по времени:  , где C – постоянная интегрирования.
, где C – постоянная интегрирования.
При равноускоренном движении  постоянное число выносится за знак интеграла, следовательно, получается закон изменения скорости:
постоянное число выносится за знак интеграла, следовательно, получается закон изменения скорости:  .
.
При  скорость равна начальной скорости, следовательно, C – это начальная скорость:
скорость равна начальной скорости, следовательно, C – это начальная скорость:  . Отсюда получается закон изменения скорости при равнопеременном прямолинейном движении:
. Отсюда получается закон изменения скорости при равнопеременном прямолинейном движении:  .
.
2 Связь между линейными и угловыми характеристиками движения вращающегося тела
Угловые (и линейные (dr, V, а) характеристики движения вращающегося тела связаны между собой.
Связь между линейным и угловым перемещениями уже найдена dr = [<Лр, г].
Разделим это выражение на dt:
Поскольку но определению dvldt = v, a dyldt = со, то полученное выражение связывает между собой линейную скорость точки v с её угловой скоростью со:
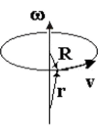
Таким образом, линейная скорость точки тела, вращающегося с угловой скоростью со относительно неподвижной оси, равна векторному произведению угловой скорости тела на радиус-вектор г, определяющий положение точки относительно оси вращения. Обратите внимание, линейная скорость разных точек твёрдого тела различна. Чем дальше от оси вращения расположена точка, тем выше её линейная скорость.
Возьмём производную от последнего выражения по времени:

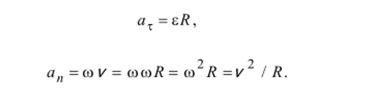
Величина dvidt по определению есть полное ускорение точки a, d(o/dt - угловое ускорение е, a dxidt - линейная скорость. Поэтому полученное выражение мы можем переписать в виде

Можно показать, что в случае вращения относительно неподвижной оси [е, г] есть тангенциальное ускорение a t, а [со, v] - нормальное ускорение а„. Модули компонентов полного ускорения равны:
|
|
Модуль полного ускорения

3 Третий закон Ньютона
Этот закон описывает, как взаимодействуют две материальные точки. Возьмём для примера замкнутую систему, состоящую из двух материальных точек. Первая точка может действовать на вторую с некоторой силой F → 1 → 2 {\displaystyle {\vec {F}}_{1\to 2}}, а вторая — на первую с силой F → 2 → 1 {\displaystyle {\vec {F}}_{2\to 1}}. Как соотносятся силы? Третий закон Ньютона утверждает: сила действия F → 1 → 2 {\displaystyle {\vec {F}}_{1\to 2}} равна по модулю и противоположна по направлению силе противодействия F → 2 → 1 {\displaystyle {\vec {F}}_{2\to 1}}.
Третий закон Ньютона является следствием однородности, изотропности и зеркальной симметрии пространства[14][15].
Третий закон Ньютона, как и остальные законы ньютоновской динамики, даёт практически верные результаты лишь только тогда, когда скорости всех тел рассматриваемой системы пренебрежимо малы по сравнению со скоростью распространения взаимодействий (скоростью света).[16]
Современная формулировка
| Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению: F → 2 → 1 = − F → 1 → 2. {\displaystyle {\vec {F}}_{2\to 1}=-{\vec {F}}_{1\to 2}.} |
Закон утверждает, что силы возникают лишь попарно, причём любая сила, действующая на тело, имеет источник происхождения в виде другого тела. Иначе говоря, сила всегда есть результат взаимодействия тел. Существование сил, возникших самостоятельно, без взаимодействующих тел, невозможно[17].
Историческая формулировка
Ньютон дал следующую формулировку закона[1]:
| Действию всегда есть равное и противоположное противодействие, иначе — взаимодействия двух тел друг на друга между собою равны и направлены в противоположные стороны. |
Для силы Лоренца третий закон Ньютона не выполняется. Лишь переформулировав его как закон сохранения импульса в замкнутой системе из частиц и электромагнитного поля, можно восстановить его справедливость[18][19].
|
|
4 Центр масс механической системы

Центром масс механической системы называется такая геометрическая точка C, концентрируя в которой (мысленно) массу M всей механической системы, получим, что ее статический момент массы равен статическому моменту массы всей механической системы, т.е.
M × rc = ∑mj × rj (1.1)
Отсюда
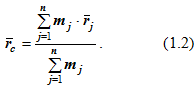
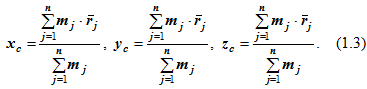
Проецируя обе части равенства (1.2) на оси координат, получаем аналитические формулы для координат центра масс механической системы:
Выражению (1.2) можно придать и другой вид, если умножить числитель и знаменатель ее правой части на ускорение силы тяжести. В этом случае
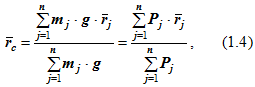
где Pj = mj ∙ g (j = 1,2,3,…,n) – веса материальных точек, образующих механическую систему;
∑Pj = M ∙ g = G – вес всей механической системы.
Выражение (1.4) определяет радиус-вектор центра тяжести неизменяемой материальной системы в предположении, что она находится в поле силы тяжести.
Отсюда следует, что центр тяжести неизменяемой (жесткой) механической системы (в частности твердого тела) совпадает с центром масс.
Однако понятия о центре масс и центре тяжести механической системы не являются тождественными. Понятие о центре тяжести как о точке, через которую проходит линия действия равнодействующей сил тяжести, по существу имеет смысл только для твердого тела, находящегося в однородном поле тяжести.
Понятие же о центре масс как о характеристике распределения масс в механической системе является более широким, так как имеет смысл для любой механической системы независимо от того, находится ли данная система под действием каких-либо сил или нет. Поэтому понятие центра тяжести можно рассматривать как частный случай по отношению к понятию центра масс.
В общем случае следует говорить о центре масс материальной (механической) системы, а не о центре тяжести. При определении центра масс материальной системы можно пользоваться методами, установленными в статике для определения центра тяжести (метод симметрии, метод расчленения на простейшие элементы, метод отрицательных масс и т.д.).
|
|
|

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!