Тяговое усилие на ваере, кH 1´143
Скорость, м/с
- выборки ваера 1,67
- травления ваера 3,34
Передаточное отношение редуктора между электродвигателем и барабаном 36
К. П. Д. передачи 0,825
Длина ваера, м 2600
Диаметр, мм
– ваера 34
– барабана лебедки 1000
– реборда барабана 3700
Длина барабана между ребордами, мм 2100
Число слоев ваера на барабане 15
Максимальная удерживающая сила при травлении, кH 340
Лебедка оборудована автоматическим ваероукладчиком и механическим устройством измерения тягового усилия. Устройство имеет коррекцию по измерению диаметра барабана и через сельсинную связь выдает показания на прибор, а также воздействует на три концевых выключателя (длина ваера меньше 50м, равна нулю, последний слой ваера). Барабан лебедки приводится во вращение электродвигателем типа IGH 1503 мощностью 460 кВт с номинальным напряжением 400 В, током 1235 А и номинальной частотой вращения 750 об/мин. Максимальная частота вращения двигателя 1600 об/мин.
Двигатели установлены в помещении, вентиляция принудительная, возбуждение двигателей независимое, питание якорной цепи и цепи возбуждения осуществляется от специальных тиристорных преобразователей. На валу каждого двигателя установлены тормоза клещевидного типа МДВ 630/118. Срабатывание центробежного привода тормоза регулируется отдельным электродвигателем в интервале 0,5-5 с с помощью блока конденсаторов. Два поста управления позволяют при необходимости осуществлять раздельную работу и регулирование частоты вращения барабанов. Принцип действия схемы управления и автоматического регулирования электропривода. Функциональная схема электропривода изображена на рис. 4.1. Управление электроприводами заключается в осуществлении пуска, регулирования частоты вращения, торможения и реверсирования, а также поддержания режимов работы привода в соответствии с требования технологического процесса.
Схема управления тиристорным электроприводом ваерной лебедки построена по принципу систем подчиненного управления с двухзонным регулированием частоты вращения. В первой зоне регулирование частоты вращения осуществляется изменением подводимого напряжения при постоянном магнитном потоке, во второй зоне - изменением магнитного потока. В цепи якоря имеется контур регулирования тока якоря и контур регулирования частоты вращения и в цепи возбуждения - контур регулирования тока возбуждения и контур регулирования Э. Д. С. двигателя.
В соответствии с числом контуров регулирования имеется соответствующее число регуляторов. Контур тока якоря подчинен контуру регулирования частоты вращения привода, а контур регулирования тока возбуждения - контуру регулирования Э. Д. С. двигателя.
Все регуляторы системы управления тиристорным электроприводом траловой лебедки реализованы на унифицированных блоках типа “Simadin”, ”Simatik” и “Simareg”. Частота
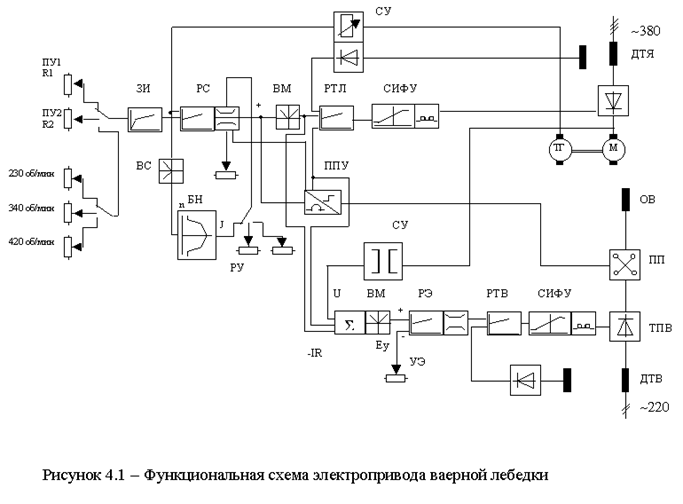
вращения привода задается с помощью потенциометров(командоконтролера). Напряжение, снимаемое с потенциометра R1 равное ±10 В, соответствует частоте вращения 1600 об/мин. Кроме планового задания числа оборотов существуют фиксированные значения числа оборотов 120 об/мин (для начального значения скорости, при длине ваера меньше 50 м, при перемотке канатов с постоянным моментом): 230,380,470 об/мин(при намотке ваера с канатного барабана).
Напряжение задания подается на задатчик интенсивности (ЗИ), который ограничивает скорость изменения входного сигнала. На вход регулятора скорости (РС), который имеет ПИ закон регулирования, подается сигнал с ЗИ, соответствующий заданной скорости и сигнал с тахогенератора пропорциональный истинному значению частоты вращения двигателя. Напряжение регулятора скорости РС является заданной величиной для регулятора тока, которая должна ограничиваться для защиты элементов якорной цепи.
Ограничения осуществляются при помощи специального электронного ограничительного звена. На рис. 4,2 показаны ограничения для различных режимов работы ваерной лебедки.
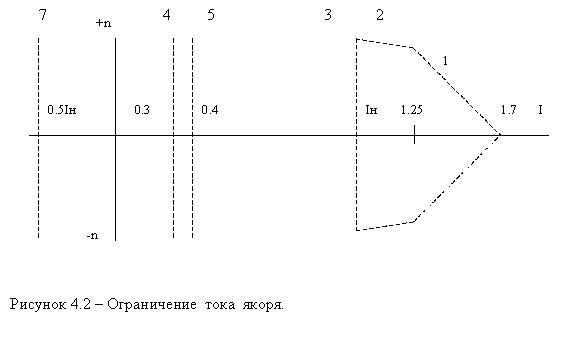
На выходе звена будет +10 В при скорости n=0, что соответствует току 1,7Iн. С увеличением частоты вращения электродвигателя независимо от направления развиваемого момента, ток будет ограничен линиями 1 и 2, а при скорости n=nном достигнет своей номинальной величины (линия 3).
При перематывании ваера с лебедки на канатный барабан для его натяжения, ток ограничивается до 0,3×Iн. Ограничение тока до 0,4×Iн используется при намотке ваера с канатного барабана на лебедки и при дотягивании траловых досок к слипу. Во время вытравливания ваеров и во время торможения электродвигатель переходит в генераторный режим (ограничение тока 0,5×Iн). Так как реверсирование электродвигателя осуществляется изменением направления тока возбуждения, то на вход регулятора РТЛ, который имеет также ПИ закон регулирования, сигналы должны поступать положительной поляРности через узел выделения модуля ВМ, а также от датчика якоря ДТЯ. С выхода РТЛ поступает напряжение управления на систему импульсно-фазового управления СИФУ, который выдает сигналы управления тиристорным преобразователем ТП. Для реверсирования электродвигателя при изменении положения рукоятки поста управления(знака напряжения управления) логический блок ЛПУ ограничит сигнал на входе регулятора оборотов до 0,3 В, одновременно заблокирует регулятор тока РТ, регулятор тока возбуждения РТВ, регулятор Э.Д.С. через узел ВМ, обесточится контактор ПП, который находился в работе и включится тот, который в работе не был, разблокируются регуляторы и изменится знак движущего момента двигателя.






