Утверждаю
Начальник цикла ПВО
КазНТУ имени К.И. Сатпаева
полковник запаса О.Степаненко
«__»____________ 2014г.
ПЛАН
Основы построения и эксплуатации РЭТ РТВ ПВО
Тема 1 ОСНОВНЫЕ ПРИНЦИПЫ И МЕТОДЫ РАДИОЛОКАЦИИ
| ЗАНЯТИЕ 1
| ЗАДАЧИ КУРСА И ОБЩИЕ СВЕДЕНИЯ
О РАДИОЛОКАЦИИ
|
1. УЧЕБНЫЕ И ВОСПИТАТЕЛЬНЫЕ ЦЕЛИ:
В результате изучения темы студенты должны:
ЗНАТЬ основные принципы радиолокации.
2. МЕТОД - групповое занятие.
3. ВРЕМЯ - 2 часа.
4. МЕСТО - класс ТСП.
5. МАТЕРИАЛЬНОЕ ОБЕСПЕЧЕНИЕ:
| - проекционная аппаратура, слайды, плакаты, схемы
|
6. ЛИТЕРАТУРА:
| - Слуцкий В.З., Фогельсон Б.И. Импульсная техника и основы радиолокации.
| | - Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства.
| | - Справочник по основам радиолокационной техники. Воениздат, 1967.
|
|
|
|
|
|
Учебные вопросы и распределение времени (слайд №3).
| | ВВОДНАЯ ЧАСТЬ
| 10 мин.
|
| 1.
| Задачи курса и основные определения радиолокации
| 10 мин.
|
| 2.
| Краткая история развития
| 10 мин.
|
| 3.
| Основные принципы радиолокации
| 25 мин.
|
| 4.
| Виды радиолокации
| 25 мин.
|
| | ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ
| 10 мин.
|
Ход занятий
Вступительная часть:
· Прием доклада дежурного по взводу;
· Проверка наличия студентов к готовности к занятию;
· Провожу контрольный опрос в виде летучки по школьной программе: закон Ома.
· Доведения темы, целей занятия и учебных вопросов;
Основная часть.
Первый учебный вопрос.
Задачи курса и основные определения радиолокации
Задачи курса обучения
Знать:
- основы построения радиолокационного вооружения;
- назначение, основные тактико-технические характеристики и боевые возможности комплекса метрового диапазона;
- структурные схемы комплекса и функционально-принципиальные схемы отдельных узлов, систем;
- назначение, физическую сущность органов управления комплекса и порядок их использования в различных условиях боевой обстановки;
- содержание и объем основных мероприятий по повышению готовности комплекса к боевому применению.
Уметь:
- обеспечивать эффективную работу РЛК в условиях активного воздействия противника;
- максимально использовать боевые возможности комплекса в различных условиях воздушной обстановки;
- организовать и проводить занятия по военно-технической и военно-специальной подготовке с личным составом подразделений (расчетов);
- выполнять нормативы (операции) по контролю функционирования и проведению технического обслуживания аппаратуры комплекса.
Воспитывать чувство ответственности за грамотное и умелое использование боевой техники при выполнении задач боевого обеспечения Войск ПВО.
Основные определения радиолокации
Радиолокация (слайд 3)– область радиотехники, задачей которой является обнаружение и распознавание различных объектов в пространстве и определение их координат и параметров движения с помощью радиоволн.
Радиолокационная цель – объект радиолокации, то есть материальный объект, сведения о котором представляют практический интерес.
Радиолокационные цели могут быть:
- аэродинамические (самолеты, вертолеты, ракеты, аэростаты, воздушные шары);
- баллистические или космические(ИСЗ, боеголовки баллистических ракет, космические корабли);
- наземные и надводные (танки, корабли).
Радиолокационная информация (РЛИ) (слайд 4) – совокупность сведений о целях, полученных средствами радиолокации.
Радиолокационная станция (РЛС) – совокупность технических средств, используемых для получения радиолокационной информации.
Одиночные РЛС обладают ограниченными возможностями по ряду основных показателей выдаваемой ими информации (размерам зоны обзора, составу и точности информации). Для полного удовлетворения требований к качеству радиолокационного обеспечения целесообразно техническое или тактическое объединение нескольких РЛС в радиолокационные комплексы.
Радиолокационный комплекс (РЛК) – совокупность функционально связанных технических средств, устройств, отдельных станций, обеспечивающих получение полного состава радиолокационной информации заданного качества.
Второй учебный вопрос.
Краткая история развития
Одна из важнейших задач радиолокации – применение ее в военной технике с целью обнаружения самолетов, баллистических ракет, космических объектов противника, а также наземных подвижных объектов.
Радиолокация – отличное средство для исследований земной атмосферы и ионосферы, а также для изучения метеоров. Она стала незаменимым помощником метеорологов при определении скорости и направления воздушных течений на различных высотах, а также при наблюдении за облаками, грозовыми фронтами и тайфунами.
Радиолокация широко применяется для астрономических наблюдений соседних космических тел солнечной системы: Луны, Солнца, Венеры, Марса и Юпитера; в гляциологии при определении толщины льда, например, при движении ледоколов; в геологии, геофизике при определении подземных неоднородностей полезных ископаемых, в жилищно-коммунальном хозяйстве для определения подземных коммуникаций и т. д.
Начало развития радиолокации относится к30-м года прошлого столетия, но широкое применение она получила только в годы Великой Отечественной войны. Явление отражения радиоволн от препятствий было открыто А.С.Поповым в 1897 году. Во время экспериментов по радиосвязи между кораблями Попов А.С. обнаружил нарушение связи, когда между этими кораблями проходил третий, от которого радиоволны отражались. А.С.Попов указал, что это явление можно использовать для определения местоположения объектов, радионавигации и радиопеленгации.
Однако состояние радиотехники того времени не позволяло использовать указанное явление в практических целях. Сложность радиолокационной техники требовала предварительной всесторонней и глубокой разработки многочисленных научных и технических проблем радиотехники и в первую очередь решения следующих задач:
1. Направленного излучения и приема радиоволн.
2. Создания приборов для измерения времени прохождения радиоволн.
3. Получение мощных колебаний в диапазоне УКВ.
Развитие радиолокационной техники стало возможным только на базе накопившихся в течение четырех десятилетий, со времени открытия А.С.Попова, теоретических и экспериментальных знаний по радиофизике, радиотехнике, электронике и автоматике.
Работы над созданием радиолокационных станций непрерывного излучения начались в СССР в 1933 году под руководством Ю.К.Коровина, П.К.Ощепкова, Б.К.Шембеля и др. В 1938 году промышленность освоила выпуск радиолокаторов «Ревень» с непрерывным методом излучения, а в 1939 году эта РЛС под названием «РУС-1» (радиоулавливатель самолетов) была принята на вооружение частей ВНОС ПВО. Она позволяла предупредить войска о появлении самолетов на 80-100 километровом участке фронта.
С 1934 года в СССР широко развернулись работы по созданию импульсных РЛС. Ученые Ю.Б.Кобзарев, П.А.Погорелко и Н.Я.Чергнцов в 1935 году разработали импульсную РЛС с электронно-лучевым индикатором и «за изобретение прибора для обнаружения самолетов» были удостоены Государственной премии.
В 1939 году производились испытания РЛС «Редут», а в 1941 году «Редут» под названием «РУС-2» (автомобильный вариант) и «Пегматит П-1» (стационарный вариант) была принята на вооружение. Эта станция обнаружения имела дальность действия 100-120 км при высоте полета цели 7000 м.
Эти и ряд других работ позволили создать промышленные образцы радиолокаторов, успешно применявшихся во время Великой Отечественной войны.
Для преподавателя. К середине 1941 года в войсках в Московской и Северных зонах ПВО было развернуто 25-30 РЛС «РУС-2» и 45 комплексов «РУС-1» в Закавказье и на Дальнем Востоке.
В трудные годы войны советские ученые, инженеры-конструкторы разработали и наладили серийный выпуск РЛС различного тактического назначения, что позволило значительно повысить боевые возможности войск (РЛС П-2, П-2М, П-3, П-3А и др.).
После войны развитие радиолокации не только не приостановилось, но и продолжалось в широких масштабах. Это объясняется тем, что радиолокация оказалась грозным оружием и нашла широкое применение ив других родах войск и в народном хозяйстве.
Увеличение скорости, высоты и дальности полета современных летательных аппаратов выдвинуло вопрос о создании РЛС с большой дальностью действия (сотни и тысячи километров), объединения этих станций в комплекс совместно действующих устройств и соединения этого комплекса с системами скоростной обработки данных (ЭВМ) и автоматического управления противовоздушными оборонительными средствами с целью защиты государственных границ и важных промышленных и военных объектов.
В настоящее время развитие радиолокационной техники осуществляется по следующим направлениям:
- увеличения дальности действия РЛС;
- улучшения качества информации о наблюдаемых объектах;
- повышения помехозащищенности, надежности и живучести;
- автоматизации процессов управления, обработки и передачи радиолокационной информации.
Такова краткая история развития радиолокации в СССР.
Третий учебный вопрос.
Первый принцип радиолокации
Явление отражения радиоволн от неоднородностей положено в основу работы радиолокационных станций. Это явление называют еще вторым излучением. Оно присуще любому волновому процессу и возникает тогда, когда на пути своего распространения волна встречает препятствие в виде неоднородности среды. Явление вторичного излучения позволяет принять отражение радиоволны в месте их посылки, т.е. в точке стояния РЛС.
Примером вторичного излучения может служить эхо, возникающее при отражении звуковых волн, а время его запаздывания и направление, откуда оно пришло, дают представление о местоположении отражающего объекта. Пример: сзвука = 330 м/с. Допустим, tзап = 4 с, тогда 2Д = сзвука × tзап или Д = (330 × 4): 2 = 660 м.
Электромагнитные волны (радиоволны), излучаемые РЛС, называются зондирующим сигналом. Радиоволны, встретив на пути своего распространения цель, отражаются, а возникшее при этом радиоэхо (эхо-сигнал) используется для ее обнаружения и определения координат.
Сущность отражения электромагнитных волн (радиоволн) от препятствий состоит в том, что под влиянием радиоволн, излучаемых РЛС, в этих препятствиях возникает переменный ток, который служит источником вторичного излучения. Частоту сигнала вторичного излучения в первом приближении можно принять равной первичному, поэтому вторичное излучение волн можно рассматривать как частичное отражение волн от данного препятствия (fотр = fзонд; lотр. = lзонд.).
Плотность потока отраженной энергии зависит от плотности потока падающей энергии, электрических свойств объекта, его конфигурации и размеров по сравнению с длиной падающей волны.
Коэффициент отражения радиоволн от металлических поверхностей практически равен единице, а от диэлектрических – меньше единицы и зависит от диэлектрической проницаемости e. Чем больше e, тем больше коэффициент отражения.
Явление вторичного отражения радиоволн объектами принято подразделять на:
- зеркальное отражение;
- диффузное или рассеянное отражение;
- дифракцию (огибание).
 Зеркальное отражение
Зеркальное отражение
Условия возникновения:
- отражающая поверхность достаточно ровная (гладкая);
- размеры отражающего объекта значительно больше длины волны РЛС lотр.об. >> lРЛС.
В этом случае отражение происходит по известным законам оптики (рис. 1.2 а, слайд 5; 7).
Отраженная волна не возвращается к источнику излучения (угол падения a равен углу отражения b), если волна не падает перпендикулярно поверхности.
Дифракция
Если размеры отражающего объекта значительно меньше длины волны
lотр.об. < < lРЛС,
то наблюдается явление дифракции, т.е. электромагнитные волны огибают объект (рис. 1.4, слайд 9) и отражения не возникает.

Из сказанного следует, что отраженный радиосигнал является основой радиолокационного обнаружения объекта и определения его координат.
В радиолокации можно использовать волны метрового диапазона и короче, так как радиолокационные цели (самолеты, корабли, танки) имеют сравнительно небольшие размеры.
От радиолокационных целей преимущественно происходит диффузное отражение.
Второй принцип радиолокации
Второй принцип радиолокации заключается в том, что электромагнитные волны можно сфокусировать антеннами РЛС в узкие направленные лучи. Фокусировку электромагнитной энергии можно пояснить аналогом из световых волн; если взять электрическую лампочку и подключить ее к батарее карманного фонаря, то лампочка будет освещать небольшую поверхность сферы.
Если же лампочку поместить в рефлектор карманного фонаря, то будет освещена поверхность только в каком-то телесном угле, но при этом расстояние освещенной поверхности от лампочки увеличится. Если антенна РЛС излучает и принимает электромагнитную энергию в определенном небольшом телесном угле и при этом наблюдается отраженный сигнал, значить цель находится в том же телесном углу.
Таким образом, направив ось антенны на цель, можно по положению оси определить угловые координаты цели: азимут b и угол места e. На рис. 1.5 (слайд 7; 10) показаны диаграммы направленности антенн дальномера и радиовысотомера в вертикальной и горизонтальной плоскостях.
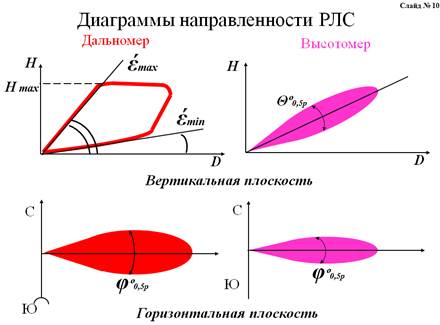
У дальномеров диаграмма направленности должна быть широкой в вертикальной плоскости и узкой в горизонтальной, у радиовысотомера – узкая в обеих плоскостях.
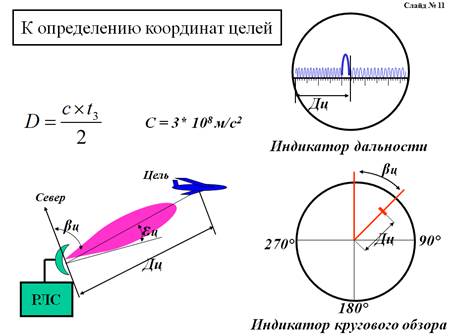
Таким образом, направленное излучение и прямолинейность распространения радиоволн дают возможность определять угловые координаты цели: азимут и угол места (рис. 1.6., слайд 8; 11).
Третий принцип радиолокации
Поскольку электромагнитные волны распространяются прямолинейно и с постоянной скоростью (с = 3.108 м/с ), то для определения дальности цели достаточно измерить время, за которое радиоволна распространяется до цели и обратно. Этот интервал времени называется «временем запаздывания отраженного сигнала» и обозначается через tз.
Так как за время tз волна проходит расстояние, равное удвоенной дальности, то
2Д = с. tз или 
где Д - расстояние от РЛС до цели (дальность цели);
с = 3.108 м/с – скорость распространения электромагнитной энергии;
tз -время запаздывания отраженного сигнала.
Например, при запаздывании отраженного импульса относительно излученного на 1 мкс расстояние до отраженного объекта будет:

Другой пример. Д = 150 км, найти tз.

Для измерения таких малых промежутков времени используются электронно-лучевые трубки (рис. 1.7, слайд 9; 12).

В 1907 году русский ученый, профессор Розинг Б.Д. впервые в мире создал электронно-лучевую трубку (ЭЛТ); в тот же период другой русский ученый Мандельштам Л.И. впервые примени ее для измерения малых отрезков времени.
В импульсной РЛС принцип определения дальности с помощью электронно-лучевой трубки заключается в следующем. В момент посылки зондирующего сигнала электронный луч начинает перемещаться по экрану трубки с постоянной скоростью, определяемой масштабом дальности. Процесс перемещения луча по экрану ЭЛТ называется разверткой.
Когда эхо-сигнал возвратится к РЛС, на экране появится отметка от цели (всплеск на индикаторе дальности) или светящаяся точка на экране ИКО. Время движения луча до отметки цели – это время задержки, а путь, пройденный лучом на экране в соответствующем масштабе, отображает дальность до цели.
Проградуировав шкалу индикатора в масштабе дальности, можно определить дальность до цели.
Таким образом, развертка индикатора является электронным секундомером для замера времени задержки (дальности до цели),
Для преподавателя. В заключении путем контрольного опроса студентов выяснить функционально-необходимые системы РЛС, используя изученные принципы радиолокации.
В Ы В О Д
Для реализации принципов радиолокации в состав РЛС должны входить:
- источник первичного излучения (радиолокационный передатчик):
- устройство фокусировки излучения и приема электромагнитной энергии (антенное устройство):
- устройство приема и преобразования эхо-сигналов (радиолокационный приемник):
- устройство отображения и замера времени задержки эхо-сигналов (индикатор):
- устройство одновременного запуска передатчика и индикатора (синхронизатор).
Четвертый учебный вопрос
Виды радиолокации
По особенностям использования радиоволн радиолокация подразделяется на:
- активную;
- активную с активным ответом;
- полуактивную;
- пассивную.
Активная радиолокация (рис. 1.8, слайд 10; 13) осуществляется путем облучения цели радиоволнами и приема отраженной от нее энергии. Она основывается на основных трех принципах радиолокации.
Передающее устройство РЛС формирует зондирующий сигнал, антенна преобразует его в энергию электромагнитных волн (радиоволны) и излучает в виде узкого луча в пространство.
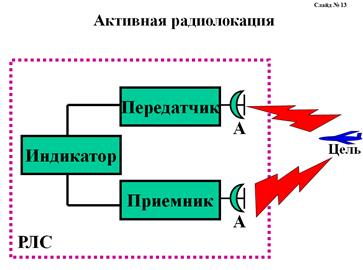 На основании первого принципа радиолокации радиоволны отражаются от цели. Эхо-сигнал принимается антенной радиолокационного приемника, усиливается, преобразуется приемником и выдается на индикатор РЛС. В индикаторе РЛС фиксируется наличие цели и определяется ее координаты.
На основании первого принципа радиолокации радиоволны отражаются от цели. Эхо-сигнал принимается антенной радиолокационного приемника, усиливается, преобразуется приемником и выдается на индикатор РЛС. В индикаторе РЛС фиксируется наличие цели и определяется ее координаты.
Активная радиолокация с активным ответом (рис. 1.9, слайд 10; 14) от предыдущей отличается тем, что на объекте (самолете, ракете) устанавливается ответчик, представляющий собой переизлучатель (приемо-передающее устройство), запускаемый сигналами радиолокатора.

Следует отметить, что активную радиолокацию с активным ответом можно использовать только на своих объектах (самолетах, ракетах). Эта система используется для наведения самолетов и ракет.
Система наведения работает по следующему принципу: на радиолокационный вопрос РЛС «Где ты?» следует радиолокационный ответ «Я здесь». Ответ в виде отметки цели отображается на индикаторе и используется для выработки команд управления.
Наличие активного ответа позволяет увеличить дальность действия РЛС по своим самолетам (ракетам), поскольку сигнал ответчика обладает большой энергией, чем отраженный сигнал.
Кроме того, системы активного ответа широко применяются для опознавания государственной принадлежности цели путем анализа структуры сигнала ответчика.
Система опознавания работает по принципу: на радиолокационный вопрос «Кто ты?» свои самолеты отвечают радиолокационным сигналом «Я свой», и это фиксируется на экране индикатора.
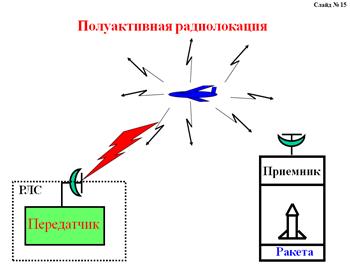 Полуактивная радиолокация (рис. 1.10, слайд 11; 15) является частным случаем активной радиолокации. Она отличается тем, что облучение цели и ее обнаружение производится в различных пунктах. Примером может служить система управления зенитными ракетами, когда на борту ракеты размещено приемное устройство, а мощное передающее устройство размещено на земле или самолете.
Полуактивная радиолокация (рис. 1.10, слайд 11; 15) является частным случаем активной радиолокации. Она отличается тем, что облучение цели и ее обнаружение производится в различных пунктах. Примером может служить система управления зенитными ракетами, когда на борту ракеты размещено приемное устройство, а мощное передающее устройство размещено на земле или самолете.
 Пассивная радиолокация (рис. 1.11, слайд 11; 16) означает, что цель является источником электромагнит -ного излучения, а РЛС выполняет функции приемного устройства, предназначенного для определения направления на этот источник.
Пассивная радиолокация (рис. 1.11, слайд 11; 16) означает, что цель является источником электромагнит -ного излучения, а РЛС выполняет функции приемного устройства, предназначенного для определения направления на этот источник.
Различные объекты в зависимости от температуры излучают электромагнитные колебания от инфракрасной области частот до волн сантиметрового диапазона. Излучение длинных волн наблюдается при запуске баллистических ракет.
Излучение на коротких волнах распространяется до 8000 км, а на сверхдлинных волнах – на еще большую дальность.
Электромагнитные волны образуются при ядерных взрывах. Их прием позволяет регистрировать место и измерять силу взрыва.
Основное достоинство пассивных РЛС состоит в полной скрытности работы (нет передатчика), а также в возможности обнаружения некоторых целей, недоступных для активных радиолокаторов.
Заключительная часть
- Вывод по занятию;
Достигнуты учебные цели;
- Вопросы для контроля усвоения материала
Задание на самоподготовку:
1.Слуцкий и др. Импульсная техника и основы радиолокации. С. 217-222.
2.Белоцерковский Г.Б. Основы радиолокации и радиолокационные устрой-
ства. С. 3-11.
3.Справочник по основам радиолокационной техники Воениздат. С. 11-12.
4.Принципы и методы радиолокации. Учебное пособие. Часть 1.
Знать основные определения, принципы и методы радиолокации.
Уметь по заданной tзап определить Д цели и наоборот.
Окончание занятия;
Руководитель занятия:
Утверждаю
Начальник цикла ПВО
КазНТУ имени К.И. Сатпаева
полковник запаса О.Степаненко
«__»____________ 2014г
ПЛАН
проведения занятия по дисциплине
Ход занятий
Вступительная часть:
· Прием доклада дежурного по взводу;
· Проверка личного состава и готовности к занятию;
· Целесообразно провести контрольный опрос по теме 1/1.
1. Местоположение летательного аппарата относительно РЛС определяется тремя пространственными координатами
- наклонной дальностью Д – расстояние от РЛС до объекта по прямой;
- азимутом b – угол в горизонтальной плоскости между направлением на истинный Север и проекцией наклонной дальности;
- углом места e – угол в вертикальной плоскости между прямой, соединяющей точку стояния РЛС и цель (Ц), и проекцией этой прямой на горизонтальную плоскость.
2. Три принципа радиолокации.
Первый принцип радиолокации заключается в том, что электромагнитные волны способны отражаться от неоднородностей, встречающихся на пути их распространения («вторичное излучение»).
Второй принцип радиолокации заключается в том, что электромагнитные волны с помощью антенн РЛС можно сконцентрировать в узкий луч.
Третий принцип радиолокации заключается в том, что электромагнитные волны распространяются в пространстве прямолинейно и с постоянной скоростью (с = 3 × 108 м\с).
3. Виды радиолокации
По особенностям использования радиоволн радиолокация подразделяется на:
-активную;
-активную с активным ответом;
-полуактивную;
-пассивную.
Оценить ответы и объявить оценки. Сделать выводы об усвоении материала.
· Доведения темы, целей занятия и учебных вопросов;
Основная часть.
Первый учебный вопрос.
Уравнение максимальной дальности действия РЛС в свободном пространстве
Максимальная дальность действия РЛС – это предельное расстояние до цели, при котором обеспечивается обнаружение отраженного сигнала от цели на фоне шумов с заданной вероятностью.
Дальность действия РЛС в свободном пространстве (не учитывая влияния земли и атмосферы) в первую очередь зависит от основных ее параметров, отражающих свойств и размеров облучаемого объекта, т.е. цели.
Параметры РЛС
| - мощность передатчика в импульсе
| -
| Pu
|
| - чувствительность приемника
| -
| Pпр.min
|
| - коэффициент усиления антенны
| -
| G
|
| - эффективная площадь антенны
| -
| Sа
|
Параметры цели
| - эффективная отражающая поверхность цели
| s
|
Чувствительность приемника характеризует способность его принимать слабые сигналы (чем меньше мощность принимаемых сигналов, тем лучше чувствительность). Коэффициент усиления и эффективная площадь антенны характеризует ее фокусирующие свойства.
Предположим, передатчик РЛС находится в точке «О» (рис. 2.1, слайд 13; 18), а цель находится на расстоянии Д в точке «О».

Тогда плотность потока мощности Пц на расстоянии Д (в точке О1) при ненаправленной передающей антенне РЛС можно найти, разделив излучаемую мощность Ри на поверхность сферы с радиусом Д, равную 4pД2

 .
.
При направленном излучении плотность потока мощности у цели Пц возрастает в G раз. Следовательно, Пц в направлении максимального излучения будет равна:
 .
.
Если в направлении максимального излучения антенны находится цель с эффективной отражающей поверхностью s (м2), то отраженная от цели мощность Ротр получается равной:
 .
.
Под эффективной отражающей поверхностью цели s понимают такую поверхность, которая при равномерном рассеивании энергии по всем направлениям дает такую же интенсивность отраженного сигнала в месте приема, как и реальная цель.
Плотность потока отраженной мощности Потр на расстоянии Д от станции можно получить, разделив величину отраженной мощности Ротр на поверхность сферы радиусом Д
 .
.
Таким образом установили, что на единицу площади приемной антенны РЛС приходится плотность потока отраженной мощности, равная Потр.
Учитывая, что эффективная площадь антенны равна Sa, м2, то полная величина мощности отраженного сигнала, принятая антенной РЛС Рпр, будет равна
 .
.
В Ы В О Д
Дальность действия РЛС тем больше, чем больше мощность излучения Ри, коэффициент усиления G и эффективная площадь антенны Sa, эффективная отражающая поверхность цели s и чем меньше абсолютная величина чувствительности приемника Рпр.min.
Наибольший эффект для увеличения Дmax дает увеличение геометрических размеров антенны G и Sa, где для увеличения Дmax в два раза достаточно увеличить площадь антенны в 4 раза. Но геометрические размеры ограничиваются конструктивными особенностями антенных устройств. Наименьший эффект для увеличения Дmax дает увеличение Ри,s, Рпр.min, так как для увеличения Дmax в два раза их надо увеличивать в 16 раз.
Второй учебный вопрос.
Предельная дальность прямой радиовидимости
Рассмотренное нами основное уравнение радиолокации, предназначенное для расчета дальности действия станции, справедливо только в том случае, если между станцией и целью существует прямая видимость. Причиной, ограничивающей дальность прямой видимости цели, а следовательно, и возможную дальность ее обнаружения, является кривизна земной поверхности (рис. 2.2, слайд 14, 19).

Так как радиоволны распространяются прямолинейно, то под линией горизонта (АС) образуется радиотень Если цель находится ниже линии горизонта (Ц2), она не будет обнаружена РЛС, хотя дальность действия при прямой видимости может значительно превышать расстояние до этой цели. Обнаружены будут только те цели, которые находятся выше линии горизонта (Ц1), если расстояние до них не превышает дальность действия станции.
Предельная дальность видимости Дпр зависит от высоты антенны ha и высоты цели Нц относительно поверхности земли. Предельная дальность прямой видимости Дпр можно определить как
 (1)
(1)
где Rз - радиус земной поверхности, равный 6375 км.
Поскольку Rз во много раз больше ha и Нц, то
 (2)
(2)
Подставив в эту формулу величину Rз = 6375 км, получим
 (3)
(3)
где Дпр, ha и Нц выражены в километрах.
При работе наземной РЛС по воздушным целям Нц >> ha
 (4)
(4)
Таблица Дпр для разных высот полета цели
Из формулы (4) и таблицы видно, что низколетящие цели могут быть обнаружены на меньших дальностях, чем высоколетящие.
Дmax для РЛС, работающих в системе противосамолетной обороны, не превосходит 500...600 км (Нц = 20...25 км. Нц для РЛС сверхдальнего обнаружения системы ПРО достигает 5000 км и более (Нц ракет = 1000 км и более. Для увеличения дальности действия наземных РЛС антенну обычно размещают на возвышенности. Формула (3) справедлива для свободного пространства без учета влияния атмосферы на распространение радиоволн.
Третий учебный вопрос.
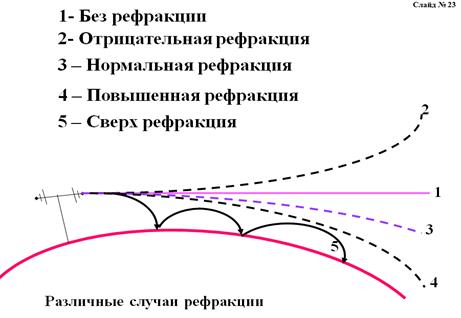
Рефракция и сверхрефракция
Радиоволна распространяется прямолинейно и с постоянной скоростью только в однородной среде, в частности, в диэлектрике с постоянным коэффициентом диэлектрической проницаемости e. Между тем, по мере удаления от земли температура, влажность и давление воздуха меняются (уменьшаются), особенно в пределах первых десяти километров.
В результате, с увеличением высоты диэлектрическая проницаемость воздушного слоя уменьшается. Это приводит к преломлению пути распространения радиоволны различными слоями атмосферы по направлению к земле. Это явление получило название «явление рефракции».
Благодаря явлению рефракции дальность действия РЛС увеличивается и становится возможным наблюдение целей, находящихся ниже линии горизонта (Ц2) (рис. 2.4. слайд 16, 21).

Увеличение предельной дальности видимости Дпр можно учесть изменением коэффициента формулы (3) (см 2-й уч. вопрос)

При так называемом стандартном состоянии атмосферы (нормальной рефракции величина Rз заменяется эквивалентным радиусом земли Rзэ = 8500 км.
Rзэ – эквивалентный радиус воображаемой земли, при котором электромагнитный луч под влиянием рефракции распространяется прямолинейно.
С учетом рефракции дальность прямой видимости Дпр достаточно точно определяется по формуле

Для наземных РЛС, когда Нц >> ha, то
 .
.
При резком уменьшении влажности и значительной разности температур и давления воздуха (по высоте) ультракороткие радиоволны огибают земную поверхность вследствие многократного отражения от нижних слоев атмосферы (рис. 2.5, слайд 17, 22).

Нижний слой атмосферы совместно с поверхностью земли образует своеобразный волновод, направляющий поток электромагнитной энергии. Это явление получило название сверхрефракции (рис. 2.5 –5). При сверхрефракции дальность обнаружения достигает порядка 2500 км при дальности прямой видимости в несколько десятков километров.
Однако атмосферные условия, вызывающие сверхрефракцию, создаются нерегулярно и сравнительно редко, обычно в летние месяцы в субтропических и тропических поясах преимущественно над водными пространствами.
Поглощение и рассеяние энергии радиоволн в атмосфере возникает из-за наличия в ней кислорода и водяных паров, то есть атмосфера не радиопрозрачна. Вследствие поглощения и рассеяния энергия, переносимая радиоволной, непрерывно убывает вдоль пути ее распространения – происходит затухание радиоволны.
Различают два вида затухания:
- за счет резонансного поглощения и рассеяния электромагнитной энергии дипольными молекулами кислорода и паров воды;
- за счет поглощения и рассеяния электромагнитной энергии частицами конденсированной влаги (дождь, снег, облака, туман).
На длинных волнах явлениями поглощения и рассеяния можно пренебречь. На волнах l< 10 см эти явления приобретают существенное значение, потери энергии радиоволн возрастают по мере укорочения длины волны.
Резонансное поглощение и рассеяние приводит к тому, что на некоторых волнах Дmax РЛС резко уменьшается. Кислород вносит особенно значительное затухание на волнах l = 0,25 см и l = 0,5 см, водяные пары – на волнах l = 0,17 и 1,3 см (рис.2.6, слайд 18, 23).
Рассеяние энергии радиоволн мельчайшими капельками воды приводит к тому, что скопление капель (облака, дождь) создает отраженный сигнал, который можно наблюдать на экране индикатора РЛС. Так, отражение от облаков начинает появляться на l = 10 см и короче. На волнах l < 3 см облака, дождь, снег создают сильные помехи, иногда делающие невозможным наблюдение за целью.
Затухание радиоволн в атмосфере сказывается в основном на волнах короче 30 см. На l = 10 см уменьшается дальность действия РЛС по сравнению с расчетной не выше 3...4 % даже при неблагоприятных атмосферных условиях.
В Ы В О Д
Максимальная дальность действия РЛС зависит от ее технических параметров, характеристик цели (s), влияния земли и атмосферы.
Поскольку технические параметры станции, и тем более условия распространения радиоволн, и характеристики целей в реальных условиях боевого применения РЛС подвержены случайным изменениям, максимальную дальность действия РЛС оценивают вероятностью. Обычно указывается в ф








