Работу основных механизмов крана рассматривают по кинематическим схемам. Все механизмы передвижения крана имеют по два холостых колеса. Так как двигатели обычно имеют угловую скорость, значительно большую, чем скорость подъемного барабана или ходовых колес моста и тележки, то движение к рабочим органам механизмов крана передается через редукторы.
Для механизмов подъема наибольшее применение получили схемы с полиспастом, рисунок 3, при помощи которого движение от барабана передается крюку.
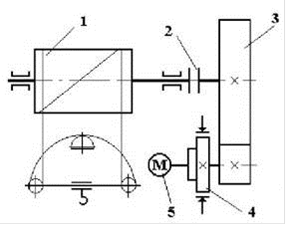
. Барабан 4. Тормоз
. Муфта 5. Электродвигатель
. Редуктор
Рисунок 3 - Кинематическая схема механизма подъема мостового крана
Механизм передвижения моста крана выполняется либо с раздельным приводом ходовых колес, либо с центральным приводом.
Вал электродвигателя соединен через зубчатую муфту с быстроходным валом редуктора. Тихоходный вал через трансмиссионный вал соединен с приводным колесом крана, рисунок 4, 5. Раздельный привод устанавливается на кранах пролетом от 19,5 м до 34, 5 м.
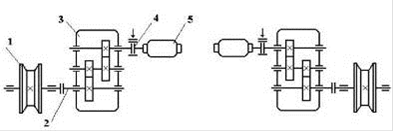
1. Приводное колесо 4. Зубчатая муфта
. Трансмиссионный вал 5. Электродвигатель
3. Редуктор
Рисунок 4 - Кинематическая схема механизма передвижения с раздельным приводом

1. Приводное колесо 4. Зубчатая муфта
. Трансмиссионный вал 5. Электродвигатель
3. Редуктор
Рисунок 5 - Кинематическая схема механизма передвижения с центральным приводом
Механизм передвижения тележки выполнен с центральным приводом, состоит из электродвигателя соединенного с вертикальным ступенчатым редуктором зубчатой муфтой. Выходной вал редуктора при помощи зубчатых муфт и промежуточных валов соединен с валами приводных колес, рисунок 5.
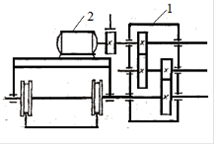
. Редуктор
. Двигатель
Рисунок 6 -Кинематическая схема механизма передвижения тележки
Требования к системе электропривода и обоснование выбранного типа электропривода. Требования к системе автоматики
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. В настоящее время на кранах применяют простые системы электропривода, в которых двигатели получают питание от сети переменного или постоянного тока неизменного напряжения через пускорегулирующие резисторы.
Электропривод с асинхронным двигателем с короткозамкнутым ротором применяют для механизмов кранов небольшой мощности, работающих в легком режиме. Если необходимо регулировать скорость или обеспечить точную остановку, то можно использовать двух- или трехскоростные двигатели.
Наибольшее распространение получили асинхронные двигатели с фазным ротором и ступенчатым регулированием угловой скорости путем изменения сопротивлении в цепи ротора. Он прост, надежен, допускает большое число включений в час и применяется на средних и больших мощностях. С помощью резисторов в цепи ротора можно в широких пределах изменять момент при пуске, получать желаемое ускорение и плавность пуска, уменьшать токи и потери энергии в двигателе при переходных процессах, а также получить уменьшение угловой скорости. Он не экономичен из-за значительных потерь энергии в пускорегулирующих сопротивлениях; повышенный износ двигателя, электромагнитных тормозов и контактной аппаратуры управления.
Если к электроприводу крановых механизмов предъявляются повышенные требования в отношении регулирования угловой скорости, в различных режимах, применяются двигатели постоянного тока.
Если требуется обеспечить повышенный диапазон регулирования угловой скорости привода, ограничение стопорного момента и плавное протекание переходных процессов двигателя при напряженном режиме работы кранового механизма, применяют регулируемый электропривод по системе Г-Д. Это позволяет при больших мощностях облегчить аппаратуру управления и повысить надежность работ электропривода.
При питании от общей сети переменного или постоянного тока применяются контроллерное или контакторное управление. При контроллерном управлении все переключения в главных цепях производится контактами силового контроллера, управление которым, особенно при интенсивном режиме работы, требует от крановщика значительных усилий и напряжений. Контакторное управление осуществляется от магнитного контроллера, состоящего из командо - контроллера и контакторно - релейной панели. Переключение в главных цепях двигателя производится контакторами, а крановщик управляет командо - контроллером. При контакторном управлении процесс пуска, торможения и реверса автоматизируются. В ряде случаев применяют как контроллерное управление для механизмов с менее напряженными режимами работы, так и контакторное, обычно для подъема груза.
Для качественного выполнения подъема, спуска и перемещения грузов электропривод крановых механизмов должен удовлетворять следующим требованиям:
регулирование угловой скорости электродвигателя в сравнительно широких пределах. Для обычных кранов 4:1; для специализированных 10:1;
обеспечение необходимой жесткости механических характеристик электропривода, особенно регулировочным с тем, чтобы низкие скорости почти не зависели от груза;
ограничение ускорении до допустимых пределов при минимальной длительности переходных процессов;
реверсирование электропривода и обеспечение его работы как в двигательном, так и в тормозном режимах.
На основании проведенного выше анализа выбираем электропривод с асинхронным двигателем с фазным ротором.
Большое внимание в последние годы уделяется автоматизации грузоподъемных машин. Основным направлением автоматизации этих машин является управление, безопасность, контроль и диагностика. Однако в связи со спецификой использования важную роль в работе грузоподъемных машин играет их безопасность.
Возможности автоматизации весьма обширны и зависят от отрасли промышленного производства, от подбора комплектующих материалов для систем автоматики. К примеру, самой важной частью грузоподъемного механизма вне зависимости от его типа является механизмы подъема и передвижения тележки. Новейшие семейства преобразователей частоты разных фирм производителей обладают всеми необходимыми функциями для управления крановыми приводами. Подъем с повышенной скоростью, контроль состояния тормоза, позиционирование с помощью концевых выключателей, выравнивание нагрузки, управление тормозом, адаптированное для приводов перемещения, подъема и поворота, выбор слабины тросов, управление моментом, измерение нагрузки, многочисленные алгоритмы управления двигателем.
Система электропривода грузоподъемных машин обеспечивает:
плавный разгон и торможение механизмов с заданным ускорением;
регулирование скорости механизмов;
ограничение предельных нагрузок;
контроль, защиту и индикацию состояния оборудования.






