В станках с ЧПУ траектория движения может быть задана непосредственно указанием пути инструмента, либо же через описание контура обрабатываемой детали. В любом случае траектория (контур) задаются с помощью двух элементов – отрезка прямой линии и дуги окружности. Как правило, при описании траектории движения инструмента (или контура детали) описывается лишь конечная точка элемента, в то время как за начальную точку принимается конечная точка предыдущего элемента. В качестве же начальной точки первого элемента траектории используется элемент «точка», которая определяет лишь самое начало описания контура и в дальнейшем не используется.
Различают следующие траектории движения (типы интерполяции):
· линейная интерполяция, при которой обеспечивается движение по прямой линии одновременно по всем координатам.
· круговая интерполяция, при которой движение осуществляется по дуге окружности в заданной рабочей плоскости.
· винтовая интерполяция (комбинация круговой и линейной), при которой задействуются лишь синхронные координатные оси (например, X, Y и Z), в то время как вспомогательные (асинхронные) координатные оси не используются.
Рассмотрим виды интерполяций более подробно.
1. Линейная интерполяция при ускоренном перемещении (G 00) [6]. В этом режиме запрограммированное перемещение интерполируется, а движение к конечной точке осуществляется по прямой линии с максимальной подачей. Скорость и ускорение подачи, по крайней мере, одной оси максимальны. Скорость подачи других осей контролируется таким образом, чтобы движение всех осей завершилось в конечной точке одновременно.
При активной инструкции G 00 движение замедляется до нуля в каждом кадре. Если же в замедлении скорости подачи до нуля в каждом кадре необходимости нет, то вместо G 00 используют G 200. Значение максимальной скорости подачи не программируется, но задается так называемыми «машинными параметрами» в памяти системы ЧПУ. Инструкция G 00 является модальной, и ее появление деактивирует G -инструкции той же группы: G 01, G 02, G 03, G 05, G 10- G 13, G 73, G 200.
2. Линейная интерполяция на ускоренном перемещении без замедления [6]. При этом виде интерполяции отсутствует замедление скорости подачи до нуля в конце каждого кадра. Значение максимальной скорости подачи не программируют, но задают «машинными параметрами» в памяти системы ЧПУ. Инструкция является модальной, и ее появление деактивирует G -инструкции той же группы: G 00, G 01, G 02, G 03, G 05.
3. Линейная интерполяция (G 01) [6]. Перемещение с заданной скорость подачи
(в F -слове) к конечной точке кадра осуществляется по прямой линии (рис. 3.2).
Все координатные оси завершают движение одновременно. Запрограммированная скорость подачи является контурной, т. е. значения подачи для каждой отдельной координатной оси будут меньше. Значение скорости подачи обычно ограничивают настройкой «машинных параметров». Инструкция G 01 является модальной, и ее появление деактивирует
G -инструкции той же группы: G 00, G 02, G 03, G 05.
4. Круговая интерполяция (G 02, G 03) [6]. Перемещение в кадре осуществляется по окружности с контурной скоростью, заданной в активном F -слове. Движение по всем координатным осям завершается в кадре одновременно; также и в том случае, когда одна из осей не принадлежит плоскости круговой интерполяции. Вдоль этой оси движение будет линейно интерполируемым, а общая траектория станет винтовой линией. Инструкции G 02 и G 03 модальны и деактивируют другие G -инструкции той же группы. Приводы подачи задают перемещение по окружности с запрограммированной подачей в выбранной плоскости интерполяции; при этом G 02 определяет движение по часовой стрелке, а G 03 – против часовой стрелки. Выбор двух синхронных координатных осей осуществляется свободно путем выбора плоскости интерполяции. При программировании окружность задают с помощью ее радиуса или координат ее центра.
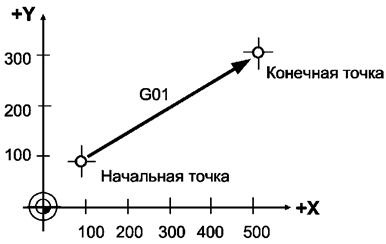
Рис. 3.2. Линейная интерполяция G 01 [6]
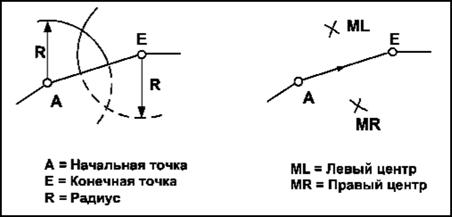
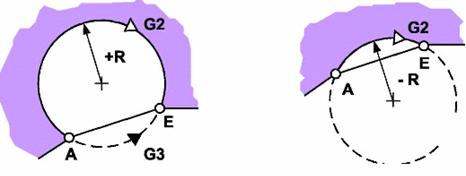
Программирование окружности при помощи радиуса [6]. Используя положение начальной и конечной точек, а также и значение радиуса, система ЧПУ определяет координаты центра окружности. Результатом расчета могут стать координаты двух точек (ML и MR) (рис. 3.3, а), расположенных соответственно слева и справа от прямой, соединяющей начальную и конечную точки. Расположение центра окружности зависит от знака радиуса; при положительном радиусе центр будет находиться слева, а при отрицательном радиусе – справа. Расположение центра определяется также инструкциями G 02 или G 03 (рис. 3.3, б).
|
| а)
|
|
| б)
|
Рис. 3.3. Программирование окружности при помощи радиуса [6]:
а – определение координат центра дуги; б – определение расположения центра дуги
Программирование окружности при помощи координат ее центра [6]. Текущее положение используется в качестве начальной точки. Окружность, заданная координатами центра, проходит через начальную и конечную ее точки. Координатные оси, вовлеченные в процесс круговой интерполяции, имеют параметры I, J и К, приданные осям X, Y и Z соответственно. Параметры устанавливают расстояние между начальной точкой и центром М дуги окружности в направлении, параллельном осям. Знак определяется направлением вектора от точки А к точке М. Стандартное определение параметров указано на рис. 3.4.
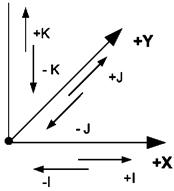
Рис. 3.4. Программирование окружности при помощи координат ее центра [6]:
I = M (X) – A (X); J = M (Y) – A (Y); K = M (Z) – A (Z); I, J, К – параметры интерполяции;
X, Y, Z – координатные оси, которым параметры I, J, К приданы соответственно;
М – центр окружности, заданный относительно начальной точки дуги окружности
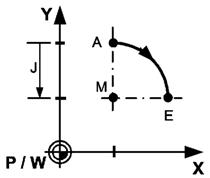
Примеры задания дуг окружностей приведены на рис. 3.5.
| 
|
| а)
| б)
|
| Особенность:
Один из параметров
интерполяции всегда равен нулю,
и нет нужды упоминать его
в программе. Здесь это параметр I
|
| в)
|
| | | |
Рис. 3.5. Примеры задания дуг окружностей [6] (начало):
а, б – задание произвольной дуги окружности; в – задание четверти окружности;
г – задание половины окружности; д – задание полной окружности
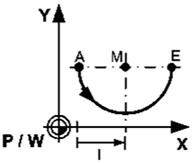
| Особенность:
По оси Y координаты начальной
и конечной точек совпадают.
Перемещение по этой координате
в кадре не указывают, как и параметр
интерполяции J.
|
| г)
|
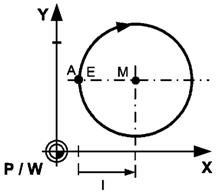
| Особенность:
Координаты начальной и конечной
точек совпадают. Приращения
по обеим координатам указывать в кадре
не нужно. Если начальная и конечная
точки лежат на границе квадратов,
то один из параметров интерполяции
будет равен нулю, и его можно
не указывать. Так, в приведенном
примере могут быть опущены
функции X, Y и J.
|
| д)
|
Рис. 3.5. Примеры задания дуг окружностей [6] (окончание):
а, б – задание произвольной дуги окружности; в – задание четверти окружности;
г – задание половины окружности; д – задание полной окружности
5. Винтовая N-интерполяция [6]. В процессе винтовой N -интерполяции осуществляется круговая интерполяция в выбранной плоскости и линейная интерполяция для остальных синхронных координатных осей, общим числом до шести круговых или линейных осей. Это связано с тем, что общее число синхронных осей в одном канале не превышает восьми. Движение по всем координатам завершается одновременно. Винтовая
N -интерполяция является обобщением простой винтовой, при которой линейная интерполяция осуществляется только для одной оси, перпендикулярной выбранной плоскости круговой интерполяции (рис. 3.6). Плоскость круговой интерполяции определяется инструкциями G 17, G 18, G 19. В одном кадре может быть запрограммирована только одна полная окружность. Скорость подачи является контурной. Движение по окружности по часовой стрелке осуществляется соответственно инструкции G 202; движение по окружности против часовой стрелки осуществляется соответственно инструкции G 203. Программирование окружности возможно с использованием радиуса и координат центра окружности. Инструкция винтовой интерполяции является модальной и принадлежит второй группе модальных G -инструкций.
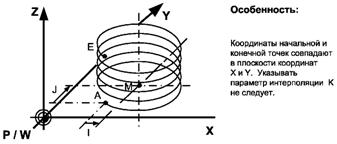
Рис. 3.6. Простая винтовая N -интерполяция (G 202, G 203) [6]
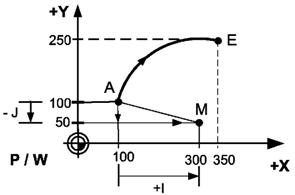
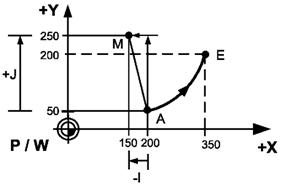
6. Круговая (винтовая) интерполяция с выходом на круговую траекторию по касательной (G 05) [6]. Система ЧПУ использует инструкцию G 05 для расчета такого кругового участка, выход на который из предыдущего кадра (с линейной или круговой интерполяцией) осуществляется по касательной. Параметры формируемой дуги определяются автоматически, т. е. программируется только ее конечная точка, а радиус не задается. Различные примеры программирования с инструкцией G 05 показаны на рис. 3.7.
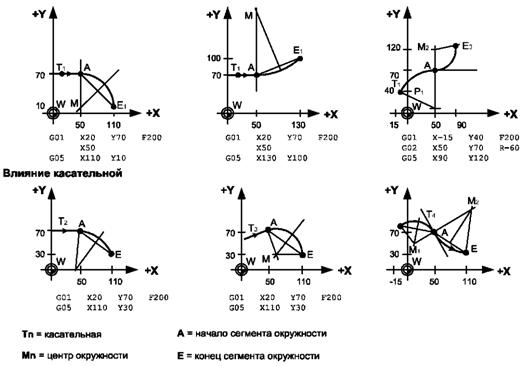
Рис. 3.7. Примеры программирования с инструкцией G 05 [6]






