Потери в электрических машинах детально изучаются в соответствующих курсах. Основные составляющие потерь в машине:
потери в обмотках (потери в меди),
потери в магнитопроводе (потери в стали),
потери в трущихся частях (потери механические).
Для нерегулируемого электропривода первую составляющую, пропорциональную  относят к переменным потерям, поскольку
относят к переменным потерям, поскольку  а последний определяется моментом сопротивления, т.е. зависит от технологического процесса. Две другие составляющие относят условно к постоянным потерям, так как потери в магнитопроводе определяются практически неизменными амплитудой и частотой магнитной индукции, а механические потери — практически неизменной скоростью. Таким образом, для нерегулируемого электропривода в первом приближении можно считать
а последний определяется моментом сопротивления, т.е. зависит от технологического процесса. Две другие составляющие относят условно к постоянным потерям, так как потери в магнитопроводе определяются практически неизменными амплитудой и частотой магнитной индукции, а механические потери — практически неизменной скоростью. Таким образом, для нерегулируемого электропривода в первом приближении можно считать
 (6.8)
(6.8)
где  постоянные потери; / и R — фазный ток и эквивалентное сопротивление силовой цепи; т -— число фаз.
постоянные потери; / и R — фазный ток и эквивалентное сопротивление силовой цепи; т -— число фаз.
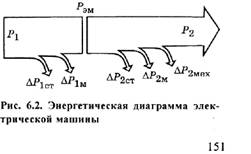
Более детальное качественное представление о потерях дает рис. 6.2 — диаграмма потерь при передаче энергии от электрического источника
 для электропривода постоянного тока) к вращающейся нагрузке
для электропривода постоянного тока) к вращающейся нагрузке  На диаграмме указана также электромагнитная мощность
На диаграмме указана также электромагнитная мощность  мощность в воздушном зазоре машины.
мощность в воздушном зазоре машины.
связанный с потерями  отнесен к моменту сопротивления
отнесен к моменту сопротивления 
Это допущение, существенно упрощающее все этапы анализа и синтеза электропривода, не вносит ощутимых погрешностей в результаты в подавляющем большинстве случаев, поскольку сами
потери сравнительно невелики. Разумеется, в редких специальных случаях, когда либо потери значительны, либо их аккуратный учет представляет почему-либо самостоятельную задачу, нужно пользоваться более полными и точными моделями.
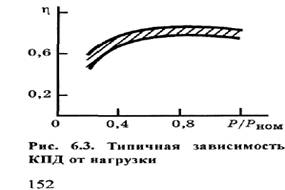
Общее представление об энергетической эффективности нерегулируемого электропривода дает зависимость КПД двигателя с редуктором от относительной нагрузки. На рис. 6.3 для ориентировки приведена такая зависимость для двигателей средней мощности (15—150 кВт) с хорошим редуктором (КПД больше 0,95).
Необходимо подчеркнуть, что работа с недогрузкой приводит к заметному снижению КПД, поэтому неоправданное завышение мощности двигателя вредно. Так же вредны в соответствии с (6.5) неудачно организованные циклы, когда холостой ход занимает в цикле большое место.
В регулируемом по скорости электроприводе энергетическая эффективность определяется главным образом выбранным способом регулирования, в связи с чем все способы можно разделить на две большие группы в зависимости от того, изменяется или нет  в процессе регулирования.
в процессе регулирования.
К первой группе  относятся все виды реостатного регулирования, а также регулирование асинхронного двигателя с коротко-замкнутым ротором изменением напряжения при неизменной частоте. Если принять для упрощения, что
относятся все виды реостатного регулирования, а также регулирование асинхронного двигателя с коротко-замкнутым ротором изменением напряжения при неизменной частоте. Если принять для упрощения, что  то для этой
то для этой
группы получим:
 (6.9)
(6.9)
т.е. потери в роторной (якорной) цепи при любой нагрузке пропорциональны разности скоростей  или скольжению
или скольжению 

При реостатном регулировании лишь часть этих потерь, пропорциональная  рассеивается внутри машины и греет ее. Другая часть, пропорциональная
рассеивается внутри машины и греет ее. Другая часть, пропорциональная 

рассеивается вне машины, ухудшая, разумеется, энергетические показатели электропривода. Именно эта часть в каскадных схемах используется полезно. Сложнее и неприятнее соотношение (6.9) проявляется в асинхронном электроприводе с короткозамкнутым ротором при регулировании изменением напряжения или каким-либо еще «хитрым» способом,
но при постоянной частоте. Здесь вся мощность рассеивается в двигателе, нагревая его и делая способ практически  непригодным для продолжительного режима работы.
непригодным для продолжительного режима работы.
Интересно, что соотношение (6.9) нельзя «обмануть», хотя такие попытки делались и еще делаются.
Ко второй группе  относятся все безреостатные способы
относятся все безреостатные способы
регулирования в электроприводах постоянного тока — изменением напряжения и магнитного потока и частотное регулирование в электроприводах переменного тока.
Принципиально способы второй группы энергетически предпочтительнее, поскольку в (6.9) разность скоростей  однако следует учитывать, что в устройствах, обеспечивающих
однако следует учитывать, что в устройствах, обеспечивающих  тоже есть потери и при малых мощностях, небольших диапазонах регулирования и немалой стоимости устройств необходимы детальные сопоставления.
тоже есть потери и при малых мощностях, небольших диапазонах регулирования и немалой стоимости устройств необходимы детальные сопоставления.
Потери в переходных режимах
Как было показано ранее (см. § 5.2), переходные процессы при быстрых изменениях воздействующего фактора могут сопровождаться большими бросками момента и тока, т.е. значительными потерями энергии, Поставим задачу оценить потери энергии в переходных процессах и найти связи между потерями и параметрами электропривода. Будем учитывать только потери в активных сопротивлениях силовых цепей двигателя, так как именно эта составляющая общих потерь заметно возрастает в переходных процессах.
Анализ проведем лишь для переходных процессов, отнесенных ранее к первым двум группам (см.  5.2 и 5.3), и начнем с важного частного случая, когда фактор, вызывающий переходный процесс, изменяется мгновенно, а процесс протекает в соответствии со статическими характеристиками
5.2 и 5.3), и начнем с важного частного случая, когда фактор, вызывающий переходный процесс, изменяется мгновенно, а процесс протекает в соответствии со статическими характеристиками 
Потери энергии в цепи ротора или якоря за время переходного процесса  определяются с учетом (6.9) как
определяются с учетом (6.9) как
 (6.10)
(6.10)
Для переходного процесса вхолостую  будем иметь:
будем иметь:
 (6.11)
(6.11)
подставив (6.11) в (6.10) и сменив пределы интегрирования, получим:
После интегрирования получим окончательно
Этот результат универсален, очень прост и очень важен: потери энергии в якорной или роторной цепи за переходный процесс вхолостую ( I при мгновенном появлении новой характеристики зависят толь-
I при мгновенном появлении новой характеристики зависят толь-
ко от запаса кинетической энергии в роторе при  и от начального и конечного скольжений. При пуске и динамическом торможении они составят
и от начального и конечного скольжений. При пуске и динамическом торможении они составят  , при торможении противовключением,
, при торможении противовключением,  при реверсе
при реверсе
 . Ни форма механической характеристики, ни время переходного процесса, ни какие-либо параметры двигателя, кроме J и со0, не влияют на потери в роторе.
. Ни форма механической характеристики, ни время переходного процесса, ни какие-либо параметры двигателя, кроме J и со0, не влияют на потери в роторе.
Если в асинхронном двигателе пренебречь током намагничивания
 И общие потери энергии в асинхронном двигателе при этих условиях составят
И общие потери энергии в асинхронном двигателе при этих условиях составят

Переходный процесс — очень напряженный в энергетическом отношении режим: потери энергии в десятки раз выше, чем за то же время в установившемся режиме.
Для того чтобы оценить потери энергии в переходном процессе под нагрузкой  Ф. 0 (другие условия сохраняются), примем, что
Ф. 0 (другие условия сохраняются), примем, что  = const
= const
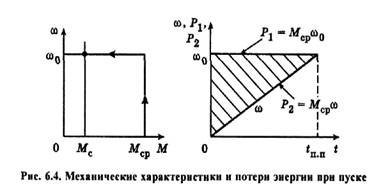
и  (этот случай был детально рассмотрен в § 5.2). Графики
(этот случай был детально рассмотрен в § 5.2). Графики
ш(Л/) и ш(0 для пуска показаны на рис. 6.4. Тогда 
а потери энергии определяются в соответствии с (6.10) за штрихованным треугольником (рис. 6.4), т.е.
При торможении нагрузка будет снижать потери:
Из изложенного следуют возможные способы снижения потерь энергии в переходных процессах:
уменьшение момента инерции путем выбора соответствующего двигателя и редуктора или замены одного двигателя двумя половинной мощности;
замена торможения противовключением динамическим торможением или использование механического тормоза;
переход от скачкообразного изменения  к ступенчатому; при удвоении числа ступеней будет вдвое сокращаться площадь треугольников, выражающих потери энергии;
к ступенчатому; при удвоении числа ступеней будет вдвое сокращаться площадь треугольников, выражающих потери энергии;
плавное изменение  в переходном процессе.
в переходном процессе.
Рассмотрим подробнее последний способ, реализуемый практически в системах управляемый преобразователь — двигатель.
При плавном изменении  в переходном процессе, как это было показано в
в переходном процессе, как это было показано в  5.3, должны уменьшаться потери энергии. Это иллюстрирует рис. 6.5, где сравниваются два случая — прямой пуск вхолостую
5.3, должны уменьшаться потери энергии. Это иллюстрирует рис. 6.5, где сравниваются два случая — прямой пуск вхолостую
(рис. 6.5, а) и частотный пуск вхолостую за время,  т.е. при ускорении
т.е. при ускорении  (рис. 6.5, б) — заштрихованные площади.
(рис. 6.5, б) — заштрихованные площади.
При прямом пуске, как уже отмечалось, потери энергии в якорной или роторной цепи определяются площадью заштрихованного треугольника на рис. 6.5, а и составляют
При плавном пуске потери определ  яются площадью заштрихованной на рис. 6.5, б трапеции;
яются площадью заштрихованной на рис. 6.5, б трапеции;
(6.16)
Отметим, что выражение (6.16), полученное при аппроксимации реальной кривой скорости (см. § 5.3) прямой линией, справедливо лишь при  ; при иных условиях следует использовать более точные модели.
; при иных условиях следует использовать более точные модели.
Из изложенного следует, что уменьшая  т.е. увеличивая время переходного процесса и снижая момент, можно управлять потерями энергии, снижая их до любого требуемого значения.
т.е. увеличивая время переходного процесса и снижая момент, можно управлять потерями энергии, снижая их до любого требуемого значения.