Конвертация это процесс преобразования активной сборки механизма, созданного в системе КОМПАС-3D, в динамический объект системы Универсальный механизм с расширением .umd.
Динамический объект – это система абсолютно твёрдых тел, в которых деформации тел не рассматриваются. Тело полностью описывается связанной с ним системой координат (ССК) и инерционными параметрами, заданными относительно центральной системы координат, оси которой параллельны осям ССК.
При конвертации каждой детали автоматически создаётся тело: назначается ССК, определяется положение центра масс и моменты инерции относительно центральной СК.
Конвертируются графические, инерционные параметры деталей, распознанные группы сопряжений преобразуются в шарниры (поступательные, вращательные и пр.).
К инерционным параметрам тела относятся:
· масса;
· осевые и центробежные моменты инерции (тензор инерции);
· координаты центра масс в системе координат тела;
· матрица присоединенных масс.
Положение центра масс в СК тела в режиме отображения отдельного элемента помечается маркером (иконкой) Центр масс  .
.
В процессе конвертации автоматически для каждого тела создается графический образ (ГО). Система координат (СК) графического образа совмещается с СК тела, поэтому при перемещении тела в окне Анимация рис. 4.2 перемещается его графический образ.
Список и ГО тел динамического объекта после конвертации можно просмотреть в окне Список элементов главного окна системы UMExpress, а параметры каждого тела в окне Инспектор объекта рис. 4.2.
Изучение процесса динамического анализа механизмов в системе UMExpress проведем на примере, созданной в системе КОМПАС 3D 3D модели двухступенчатого цилиндрического редуктора, под именем Редуктор.
Первый шаг – конвертация 3D модели механизма:
- щелкните дважды в открытой библиотеке Универсальный механизм по пункту Создать динамический объект. Начнется показ процесса конвертации данных. Конвертация отображается в окне Процесс рис. 4.1.

Рис. 4.1. Фрагмент интерфейса системы КОМПАС-3DV17 с окном Процесс, показывающим процесс конвертации 3D модели механизма из системы КОМПАС в динамический объект системы UMExpress
После окончания процесса конвертации создается динамический объект – система тел, отображаемая в главном окне системы Универсальный механизм Express ( UMExpress). Вид динамического объекта зависит от соответствующих параметров настройки его изображения (см. ниже). В нашем примере появится динамический объект - Редуктор рис. 4.2.

Рис. 4.2. Главное окно системы Универсальный механизм Express
В левой части главного окна системы UMExpress располагается окно Список элементов. В середине главного окна системы UMExpress располагается окно Анимация, в котором располагается динамический объект или его элементы. В верхней части окна Анимация располагается панель инструментов для настройки параметров изображения динамического объекта. В правой части главного окна системы UMExpress располагается окно Инспектор объекта.
В окне Инспектор объекта имеются поля вида  с буквой “с” в верхнем правом углу (constant). При щелчке левой кнопкой мыши на квадратике, содержащем эту букву, при двойном щелчке в поле ввода, а также с использованием контекстного меню можно вызвать форму – инструмент создания постоянных символьных выражений. В эти поля могут быть введены общие постоянные символьные выражения, которые используются для описания большинства параметров объекта, принимающих постоянные значения (координаты точек прикрепления многих силовых элементов, их параметры – коэффициенты жесткости и диссипации, элементы описания графических объектов и так далее). Пример корректной записи общих постоянных символьных выражений представлен ниже
с буквой “с” в верхнем правом углу (constant). При щелчке левой кнопкой мыши на квадратике, содержащем эту букву, при двойном щелчке в поле ввода, а также с использованием контекстного меню можно вызвать форму – инструмент создания постоянных символьных выражений. В эти поля могут быть введены общие постоянные символьные выражения, которые используются для описания большинства параметров объекта, принимающих постоянные значения (координаты точек прикрепления многих силовых элементов, их параметры – коэффициенты жесткости и диссипации, элементы описания графических объектов и так далее). Пример корректной записи общих постоянных символьных выражений представлен ниже

Второй шаг - настройки параметров изображения динамического объекта с помощью контекстного меню:
- щелкните правой кнопкой мыши в окне Анимация. Появится контекстное меню;
- щелкайте последовательно по каждому пункту контекстного меню и выбирайте в каждом всплывающем меню нужные Вам параметры изображения динамического объекта и его элементов. На рис. 4.3 показаны всплывающие меню каждого пункта контекстного меню;

Рис. 4.3. Всплывающие меню контекстного меню окна Анимация
- щелкните по функциональной кнопке F9. Если установить те параметры, которые представлены на рис. 4.3, то моделируемый объект – Редуктор будет выглядеть в окне Анимация так, как показано на рис. 4.2
После конвертации модели в динамический объект предусматривается его доработка:
- создание объединенных тел;
- фиксация определенных тел модели;
- доработка кинематической схемы путем визуального добавления шарниров либо их удаления;
- создание графических образов пружин, гасителей и др. силовых элементов;
- задание силовых взаимодействий.
Создание объединенных тел
Сразу после конвертации 3D модели механизма в динамический объект появится большое число тел (десятки, сотни, а может быть и больше), которые должны быть объединены в меньшее число тел, которые могут рассматриваться при моделировании как единое целое.
Вначале создают неподвижное тело, например, тело под названием Корпус редуктора.
Для создания неподвижного объединенного тела - Корпус редуктора без вращающихся деталей и верхней крышки:
- щелкните в окне Список элементов в раскрытом пункте Тела по телу Корпус редуктора низ рис 4.2, а затем в окне Инспектор объекта по вкладке Детали. Перед данной деталью в прямоугольнике будет стоять галочка (флажок). Это означает, что все объединяемые тела на данном шаге будут представляться под этим именем;
- щелкните в раскрытой вкладке Детали в окне Инспектор объекта по квадратикам перед деталями, которые можно объединить с первой деталью. Появятся галочки в квадратиках. Активизируются в окне Инспектор объекта кнопки Принятьи Отменить:
- щелкните по кнопке Принять для объединения выделенных деталей в одно абсолютно твердое тело Корпус редуктора низ. Тела, вошедшие в объединенное тело, исчезнут из списка тел в окне Список элементов. Произойдет пересчет инерционных параметров объединенного тела. Будет перестроено изображение объединенного тела, оно будет представлено в виде сборки всех деталей включенных в одно тело рис 4.4.

Рис. 4.4. Фрагмент главного окна системы Универсальный механизм Express с объединенным телом Корпус редуктора без верхней крышки
- наберите в окне Инспектор объекта в поле Имя - имя объединенного тела, например, Корпус редуктора.
Далее создают вращающиеся объединенные тела – Валы. В нашем редукторе вращающийся вал под именем Редуктор Вал1 не требует объединений.
Для создания вращающегося объединенного тела – Редуктор Вал2:
- щелкните в окне Список элементов в раскрытом пункте Тела по телу Редуктор Вал2, а затем в окне Инспектор объекта по вкладке Детали Перед данной деталью в прямоугольнике будет стоять галочка (флажок). Это означает, что объединяемые тела будут представляться под этим именем;
- щелкните в раскрытой вкладке Детали в окне Инспектор объекта по квадратикам перед деталями, которые можно объединить с телом Редуктор Вал2. Появятся галочки в квадратиках рис. 4.5.

Рис. 4.5. Фрагмент главного окна системы Универсальный механизм Express с объединенным телом Редуктор Вал2
Активизируются в окне Инспектор объекта кнопки Принятьи Отменить:
- щелкните по кнопке Принять для объединения выделенных деталей в одно абсолютно твердое тело – Редуктор Вал2.
Для создания вращающегося объединенного тела – Редуктор Вал3:
- щелкните в окне Список элементов в раскрытом пункте Тела по телу Редуктор Вал3, а затем в окне Инспектор объекта по вкладке Детали Перед данной деталью в прямоугольнике будет стоять галочка (флажок). Это означает, что объединяемые тела будут представляться под этим именем;
- щелкните в раскрытой вкладке Детали в окне Инспектор объекта по квадратикам перед деталями, которые можно объединить с телом Редуктор Вал3. Появятся галочки в квадратиках рис. 4.6.

Рис. 4.6. Фрагмент главного окна системы Универсальный механизм Express с объединенным телом Редуктор Вал3
Создание шарниров
Для описания положения одного тела относительно другого используется понятие «шарнир». Фраза «описать положение тела относительно базовой системы координат (БСК)» эквивалентна выражению «ввести шарнир между данным телом и базовым». В системе UMExpress с базовой системой координат (БСК) связывают тело под именем Base0.
Если в сборке в системе КОМПАС 3D какой-то элемент модели был зафиксирован, то автоматически после конвертации этот элемент получает шарнир, устанавливающий неподвижную связь с базовым телом - Base0. При этом эта связь получит определенное имя. Например, если элемент Корпус редуктора в системе КОМПАС 3D был зафиксирован, то в системе UMExpress связь (шарнир) будет иметь такой вид  . Значок в виде якоря
. Значок в виде якоря  перед именем шарнира означает, что шарнир зафиксирован.
перед именем шарнира означает, что шарнир зафиксирован.
Если элемент корпус в системе КОМПАС 3D не был зафиксирован и нет никаких сопряжений, то в системе UMExpress формируются фиктивные шарниры. Это, как правило, шарниры с шестью степенями свободы. Этот шарнир будет иметь такой вид  . Значок в таком виде
. Значок в таком виде  означает - шарнир с шестью степенями свободы.
означает - шарнир с шестью степенями свободы.
В процессе конвертации сопряжений, созданных в системе КОМПАС 3D, в шарниры системы UMExpress:
- сопряжение, построенное для трех деталей, игнорируется;
- не разрешается создавать более одного шарнира для пары деталей. Лишние удаляются;
- все сопряжения для пары деталей объединяются в одну группу, которая может быть сконвертирована в один шарнир;
- группа, содержащая одно сопряжение, преобразуется:
- соосность в цилиндрический шарнир с осью, совпадающий с осью сопряжения;
- совпадение, на расстоянии с типом многообразий плоскость-плоскость в плоский шарнир с тремя степенями свободы (две поступательные и одна вращательная), обеспечивающий свободное плоское движение одного тела относительно другого;
- совпадение, на расстоянии с типом многообразий линия-линия в цилиндрический шарнир с осью, совпадающей с первой линией;
- в любом другом случае вводится шарнир с шестью степенями свободы не ограничивающий относительного движения деталей;
- группа, содержащая два сопряжения, преобразуется:
- соосность + параллельно, если типы многообразий во втором сопряжении плоскости или линии, то вводится поступательный шарнир с осью сдвига, задаваемой первым сопряжением;
- соосность + совпадение или соосность + на расстоянии, если типы многообразий во втором сопряжении плоскости, то вводится поступательный или вращательный шарниры с осью сдвига или поворота, задаваемой первым сопряжением. Поступательный шарнир вводится, если ось первого сопряжения параллельна плоскости второго сопряжения. Вращательный шарнир вводится, если ось первого сопряжения перпендикулярна плоскости второго сопряжения. Обратная последовательность сопряжений приводит к тому же результату
- (совпадение или на расстоянии) +соосность, если типы многообразий во первом сопряжении линии, а во втором - плоскости то вводится вращательный шарниры, если линии первого сопряжения перпендикулярны плоскостям второго, в противном случае вводится фиксированный шарнир;
- (совпадение или на расстоянии) + (совпадение или на расстоянии), если типы многообразий в обоих сопряжениях плоскости, то вводится поступательный шарнир, если плоскости первого и второго шарниров пересекаются, или вводится плоский шарнир с тремя степенями свободы, если плоскости параллельны. Оси поступательного шарнира совпадают с линией пересечения плоскостей;
- в любом другом случае вводится шарнир с шестью степенями свободы
- группа, содержащая три и более сопряжений, всегда преобразуется в шарнир – фиксацию, т.е. пара деталей будет жестко связана;
Следует иметь ввиду, что после конвертации любая степень свободы в шарнире может быть заблокирована. Например, цилиндрический шарнир можно превратить поступательный шарнир или вращательный шарнир
Кроме того, шарниры произвольных типов легко вводятся в системе UMExpress с использованием точек связей.
Точка связи – это средство визуального добавления шарниров и силовых элементов к динамической модели. Они также являются элементами описания деталей в системе КОМПАС и тел в динамической модели системы UMExpress. Для ввода точек связи предусмотрено три способа. Первые два из них выполняются в системе КОМПАС до конвертации сборки, третий - в динамической библиотеке после конвертации.
Первый способ ввода точки связи в системе КОМПАС с помощью команды Точка (Операция ® Пространственные кривые ® Точка).
Второй способ ввода точки связи в системе КОМПАС с помощью группы точек, являющихся вершинами эскиза, входящего в дерево построения детали, с помощью назначения эскизу текстового атрибута UMPoints. С этой целью может быть использован один из эскизов, содержащихся в дереве построения детали. Однако любая вершина графического образа детали легко превращается в точку связи в динамической библиотеке. Поэтому, как правило, создается специальный эскиз - пространственная ломаная, все точки которой автоматически превращаются в точки связи динамического объекта. Для добавления данного специального эскиза используется команда Ломаная (Операция ® Пространственные кривые ® Ломаная).
Третий способ ввода точек связи в системе UMExpress с помощью:
- вершин триангуляционной разбивки графических образов деталей;
- прямого задания координат, например, центра тяжести детали;
- визуальных операций построения точек связи.
После конвертации часто шарниры требуют доработки (корректировки). При этом не обязательно, чтобы существовал шарнир, связывающий каждое тело с базой (jBase0), достаточно, чтобы для каждого тела существовала цепочка попарно связанных тел, по которой можно добраться до базового тела. В этом и заключается обязательное условие связанности моделируемого объекта.
Процесс описания положения объединенных тел (создания шарниров) включает ряд этапов:
- установка неподвижных шарниров, фиксирующих неподвижное положение определенных тел относительно базового тела Base0;
- установка других видов шарниров (вращающихся, поступательных, сферических, Карданова и др.).
При моделировании цилиндрических редукторов используют неподвижные и вращающиеся шарниры.
Вначале перейдем к фиксации определенных тел (объектов) модели.
Для представления фиксированного положения объединенного тела – Корпус редуктора (создания зафиксированного шарнира):
–щелкните в окне Список элементов по пункту Шарниры. Появится список шарниров, которые автоматически создала система UM Express во время конвертации. По умолчанию практически все шарниры имеют шесть степеней свободы, если не было ранее созданных сопряжений.

- щелкните в раскрытом списке Шарниры по шарниру Корпус редуктора низ, который по умолчанию после конвертации получил шарнир с шестью степенями свободы. Появятся в окне Инспектор объекта параметры состояния данного шарнира;
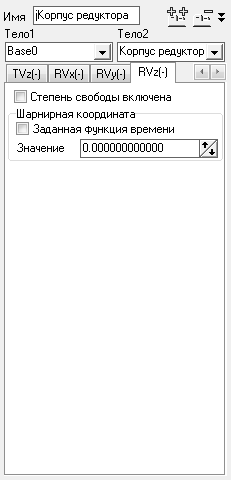
- измените в поле Имя название тела Корпус редуктора низ на Корпус редуктора рис. 4.7 а).

а) б)
Рис. 4.7. Окно Инспектор объекта с активным шарниром jКорпус редуктора: а) с шестью степенями свободы; б) в зафиксированном состоянии
- щелкните в окно Инспектор объекта по вкладке TVx, а затем в раскрытой вкладке по квадратику с галочкой (переключатель) для выключения степени свободы. После названия вкладки появится знак минус в скобках “(-)” –  ;
;
- аналогично выключите степени свободы на всех вкладках (поступательных - TVx, TVx, TVz и вращательных - RVx, RVy, RVz). В этом случае перемещение вдоль осей или поворот вокруг их запрещен. Появится перед именем шарнира в окне Список элементов значок - шарнир зафиксирован  .
.
Поскольку в редукторе имеется три вращающихся тела: Редуктор.Вал1, Редуктор.Вал2 и Редуктор.Вал3, то необходимо описать положение их относительно базовой системы координат (БСК) – тела - Корпус редуктора. Для этого используются вращательные шарниры, которые создаются с использованием опорных точек, например, центров тяжести тел и векторов, которые определяют положение осей и направления их вращения.






