Выбор структуры регулятора
При реализации системы автоматического управления на базе контроллера КР-500 возможно использовать два варианта регуляторов – с аналоговым и широтно-импульсным сигналом.
Широтно-импульсная модуляция (ШИМ) – процесс управления мощностью, подводимой к нагрузке, путем изменения скважности импульсов, при постоянной частоте. Один из методов двухуровневой ШИМ с помощью аналогового компаратора. На один из входов компаратора подаётся пилообразное напряжение от вспомогательного генератора, на другой вход — модулирующее напряжение. Состояние выхода компаратора — ШИ-модуляция. На рис. 2.2: сверху — пилообразный сигнал и модулирующее напряжение, снизу — результат ШИМ. 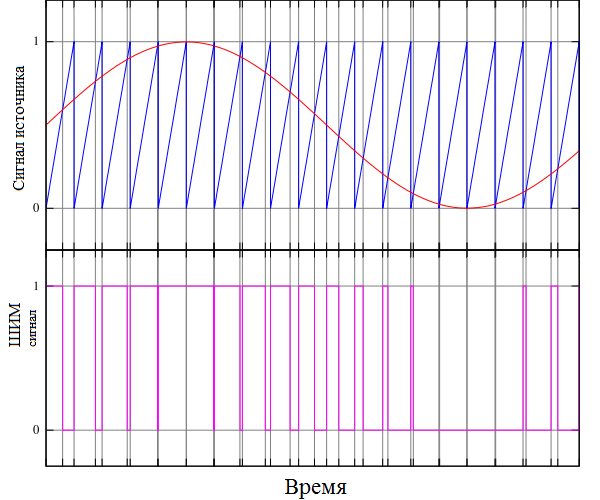
Рис. 2.2 Двухуровневая ШИМ с помощью аналогового компаратора.
Так как для регулирования температуры пара будет использоваться исполнительный механизм постоянной скорости, то ведомый регулятор будет дискретный, с широтно-импульсным выходным сигналом, а ведущий – аналоговый, с унифицированным токовым сигналом (4..20 мА).
Выбор контроллера
На ТЭС АО «Кратонтара» для управления к/а ст. № 3 более 10 лет используется программируемый логический контроллер серии КОНТРАСТ – КР-300.
На рис. 2.13 представлен внешний вид контроллера КР-300Ш – в шкафном исполнении.
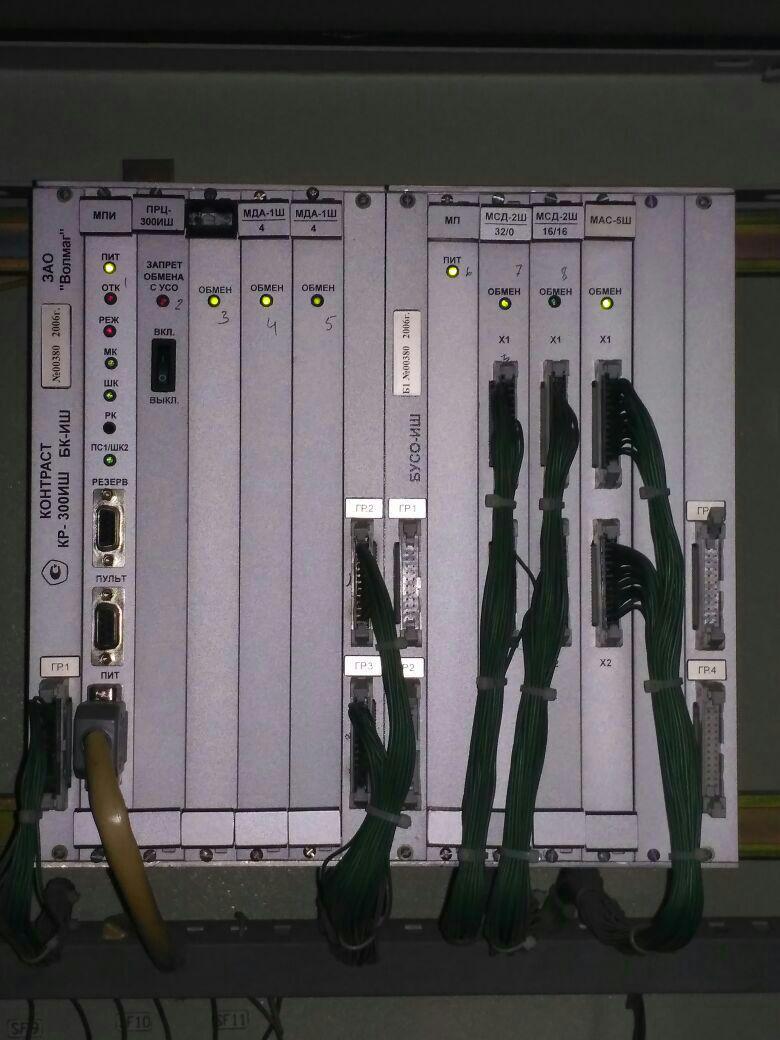
Рис. 2.13. Внешний вид контроллера КР-300Ш
На рис. 2.14 представлена структурная схема контроллера КР-300Ш.
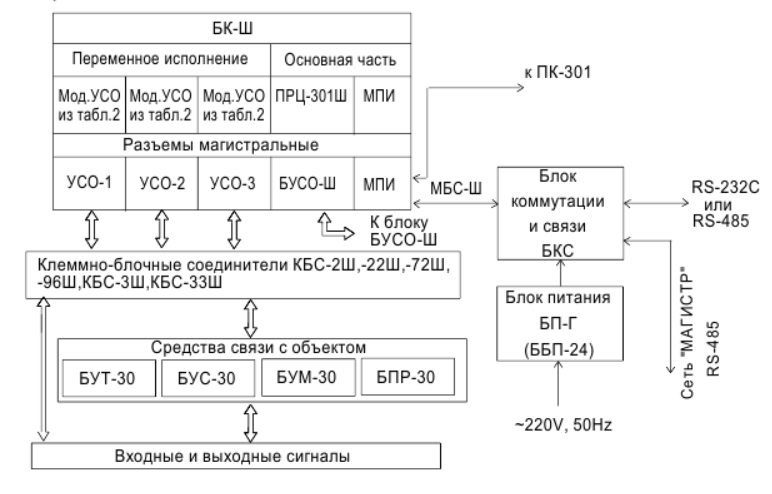
Рис. 2.14. Структурная схема контроллера КР-300.
Состав и конструкция контроллера.
Основным блоком контроллеров является блок контроллера БК-Ш.
В состав БК-Ш входят:
каркас с генмонтажной платой;
модуль процессора ПРЦ-301Ш;
от 1 до 3 модулей УСО;
модуль питания МПИ.
На передней панели блока расположены 3 вилки IDСC 24: Гр.1…Гр.3 для ввода – вывода аналоговых и дискретных сигналов. На панели модуля МПИ расположены розетка DB-9 ПУЛЬТ для подключения пульта контроллера ПК-301 и розетка DB-15 ПИТ для подключения питания и приборных цепей. На задней стенке расположен винт заземления.
Блок БУСО-Ш
Блок БУСО-Ш предназначен для увеличения числа входов-выходов контроллеров. Состав контроллеров определяется блоками, модулями и другими изделиями, входящими в его состав.
Конструктивно блоки БК и БУСО выполнены в виде блочного каркаса в контроллере КР-300Ш в которых расположены модули питания, процессора и УСО (до пяти модулей).
Соединение БК-Ш с БУСО-Ш выполняется путем внутреннего подключения между собой. К одному блоку БК-Ш возможно подсоединить до четырех блоков БУСО-Ш.
На рис. 2.15 изображены его установочные размеры:
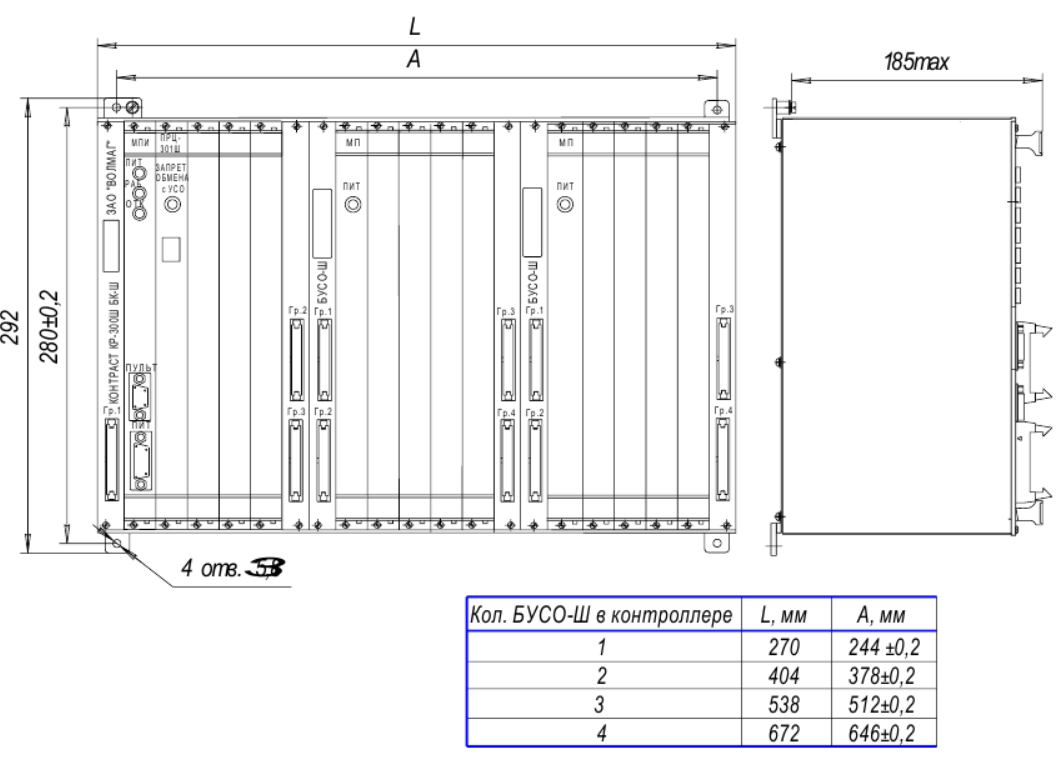
Рис. 2.15. Установочные размеры контроллера КР-300Ш.
В состав БУСО-Ш входят:
каркас с генмонтажной платой;
от 1 до 4 модулей УСО;
модуль питания МП;
На передней панели блока расположены четыре вилки IDCС-24 (Гр.1…Гр.4) для ввода – вывода аналоговых и дискретных сигналов.
Модули УСО
К устройствам связи с объектом УСО относятся:
модули аналоговых сигналов МАС-3, МАВ;
модуль аналоговых и дискретных сигналов МДА-3;
модуль дискретных сигналов МСД.
Модули УСО
Контроллер имеет широкий выбор модулей ввода-вывода аналоговых и дискретных сигналов (модулей УСО), предназначенных для взаимодействия с периферийными устройствами. Модули УСО осуществляют:
прием и преобразование сигналов от различных датчиков к уровню и формату сигналов для передачи их ведущему устройству (микроконтроллеру ШМК, блоку контроллера или верхнему уровню управления);
прием и преобразование сигналов от ведущего устройства для передачи их исполнительным устройствам.
Модули УСО – ведомые устройства полевой сети, взаимодействующие с ведущим устройством по протоколам МАГИСТР, MODBUS RTU через интерфейс RS-485 в радиальной сети. Модулям, подключенным к одной полевой сети, присваивается сетевой номер от 1 до 31.
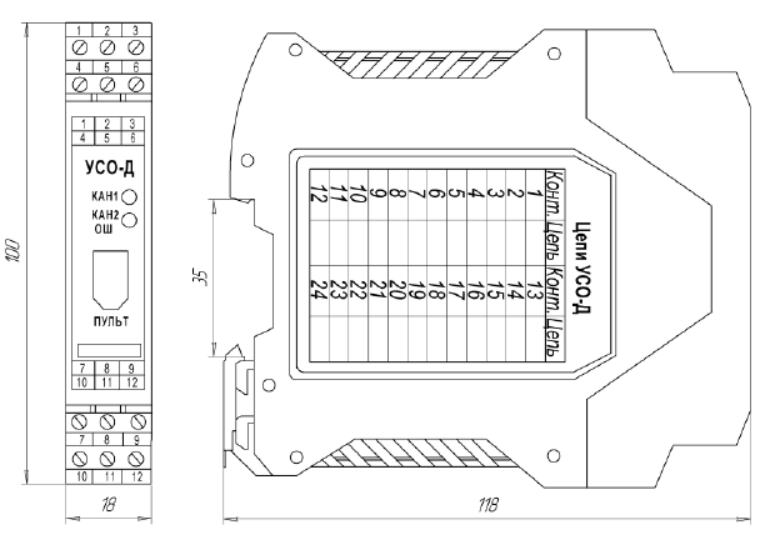
Рис.2.17. Внешний вид и габаритные размеры модулей УСО-Д
Блок питания БП-Д
Блок питания БП-Д (далее – блок БП-Д) предназначен для преобразования напряжения постоянного тока 24 В в стабилизированное напряжение постоянного тока для питания датчиков АСУ ТП.
БП-Д-01 имеет два гальванически развязанных выхода, максимальный ток – 100 мА
Блок питания БП-Г
Блок питания БП-Г (далее – блок БП-Г) предназначен для преобразования сетевого напряжения переменного тока 220 В в напряжение постоянного тока 24 В.
БП-Г-00 имеет 4 гальванически развязанных выхода, максимальный ток на выходе 1,2 – 4А, 3-8 - 0,5 А
Как было сказано выше контроллер КР-500 современнее, компактней и быстрее своего предшественника, поэтому в работе используем его.
На рис. 2.20 представлена техническая структура САУ

Рис. 2.20 Техническая структура САУ температурой перегретого пара.
Токовый сигнал (4..20 мА) от датчика температуры пара после пароперегревателя (ТХАУ Метран-271) поступает на аналоговый вход модуля МАС-Д, после чего цифровой сигнал по кабелю «витая пара» с выхода модуля МАС-Д поступает на вход блока контроллера БК-500. Туда же поступает сигнал от задатчика с операторской станции через интерфейс Ethernet. Сформированный по ПИ-закону алгоритмом РАН сигнал токовый подается на вход алгоритма РИМ, туда же поступает сигнал с датчика температуры пара после пароохладителя (через модуль МАС-Д) и результирующий сигнал, сформированный по ПИ-закону алгоритмом РИМ, поступает на модуль дискретного вывода (по кабелю «витая пара») МСД-Д. Дискретный сигнал от МСД-Д через блок ручного управления БР поступает на блок управления электродвигателем БУЭР1-30, а от него на исполнительный механизм МЭОФ-250/25, который воздействует на регулирующий орган, изменяя расход питательной воды на пароохладитель.
В заказной спецификации (табл. 2.5) представлены все выбранные технические средства автоматизации.
| Позиция
| Наименование и техническая характеристика
| Тип, марка
| Код оборудования
| Завод-изготовитель
| Единица измерения
| Кол-во
| Масса единицы
| Примечание
|
|
|
|
|
|
|
|
|
|
|
|
| Исполнительный механизм
МЭОФ-250/25-0,25У-99К с блоками БСПТ10 и БП20, с конечными выключателями положения.
| МЭОФ-250/25-0,25У-99К
|
| ОАО”Завод Электроники и Механики” г. Чебоксары
| шт.
|
|
|
|
|
| Датчик температуры ТХАУ Метран-271 -02-160-0,5-t10-(0…600ºС)4-20мА-У1.1(30) ТУ4211-003-12580824-2001-ГП
| ТХАУ Метран-271
|
| Промышленная группа «Метран» г.Челябинск
| шт.
|
|
|
|
|
| Блок питания БП-Г
| БП-Г
|
| ЗАО «Волмаг г. Чебоксары
| шт.
|
|
|
|
|
| Блок питания БП-Д.02
| БП-Д.02
|
| ЗАО «Волмаг г. Чебоксары
| шт.
|
|
|
|
|
| Блок управления электродвигателем реверсивный БУЭР 1-30-00
| БУЭР 1-30-00
|
| ЗАО «Волмаг г. Чебоксары
| шт.
|
|
|
|
|
| Контроллер КР-500
| КР-500
|
| ЗАО «Волмаг г. Чебоксары
| шт.
|
|
|
|
|
| Модуль дискретных выходов МСД-Д
| МСД-Д
|
| ЗАО «Волмаг г. Чебоксары
| шт.
|
|
|
|
|
| Модуль аналоговых входов МАВ-Д
| МАВ-Д
|
| ЗАО «Волмаг г. Чебоксары
| шт.
|
|
|
|
|
| Запорно-регулирующая арматура METSO T5_03
| METSO T5_03
|
| Metso Flow Control Inc
| шт.
|
|
|
|
Таблица 2.5
Алгоритм РАН.
На рис. 2.22, ниже представлена функциональная схема алгоритма РАН.
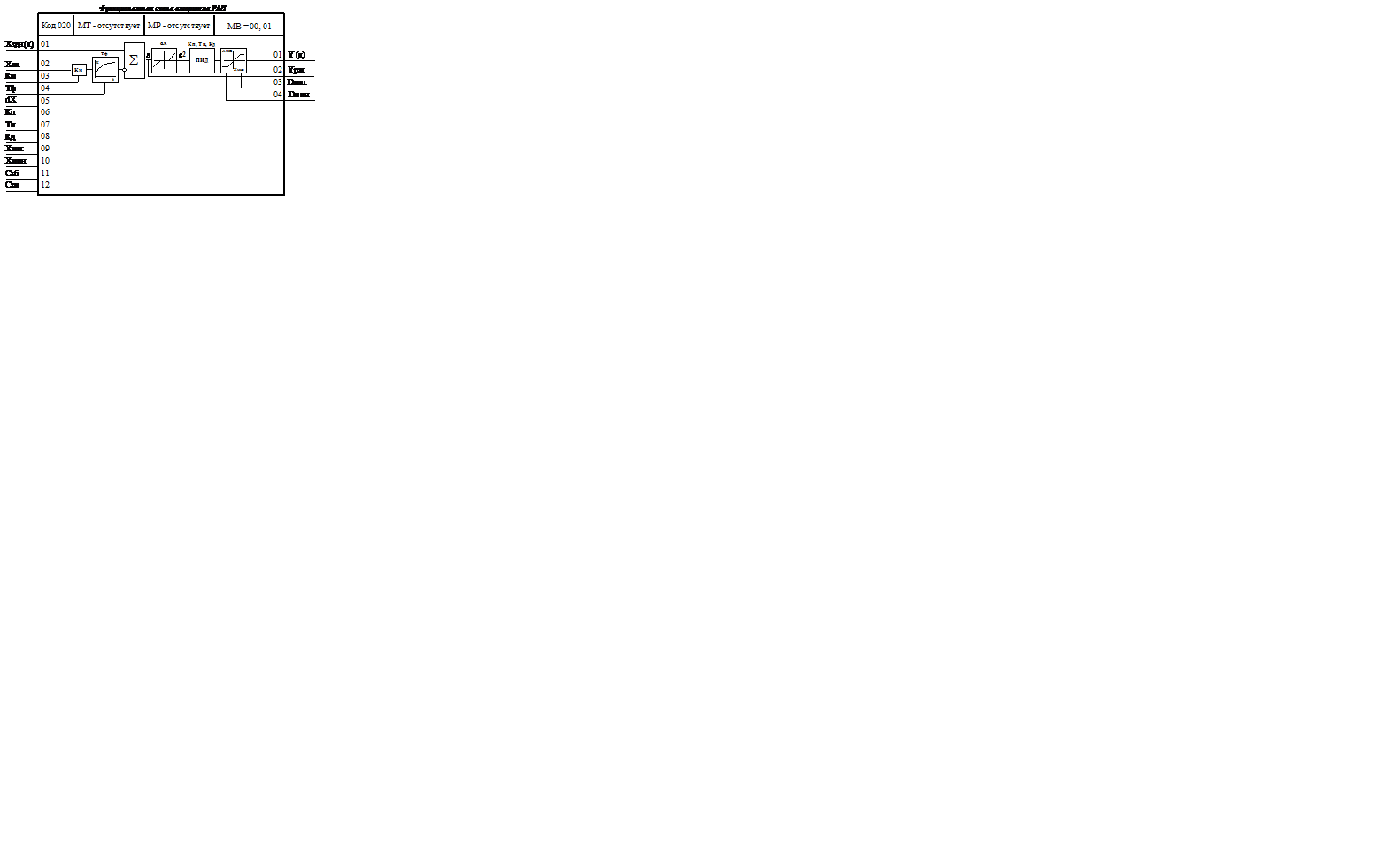
Рис 2.22 Структурная функциональная схема алгоритма РАН.
РАН (регулирование аналоговое) - Алгоритм используется при построении ПИД-регулятора, имеющего аналоговый выход. Алгоритм, как правило, сочетается с пропорциональным исполнительным механизмом (позиционером) либо используется в качестве ведущего в схеме каскадного регулирования.
Помимо формирования ПИД закона в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется, вводится зона нечувствительности. Выходной сигнал алгоритма ограничивается по максимуму и минимуму.
Функциональная схема алгоритма содержит несколько звеньев (Рис.4.1). Звено, выделяющее сигнал рассогласования, суммирует два входных сигнала, при этом один из сигналов масштабируется, фильтруется и инвертируется. Сигнал рассогласования e на выходе этого звена (без учета фильтра) равен:
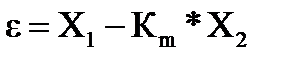
где Км ¾ масштабный коэффициент.
Фильтр нижних частот первого порядка имеет передаточную функцию:
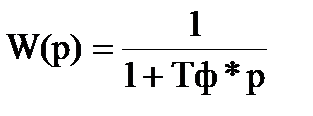
где Тф ¾ постоянная времени фильтра.
Зона нечувствительности не пропускает на свой выход сигналы, значения которых находятся внутри установленного значения зоны. Сигнал e2 на выходе этого звена равен:
e2= 0 при | e| £Х D /2;
e2=(|e | - ХD /2)*sign e при | e| >ХD /2,
где ХD ¾ зона нечувствительности.
ПИД-звено выполняет пропорционально-интегрально-дифференциальное преобразование сигнала и имеет передаточную функцию:
 ,
,
где Кп, Ти, Кд ¾ соответственно коэффициент пропорциональности, постоянная времени интегрирования и коэффициент времени дифференцирования, равный Кд=Тд/Ти (при Кд*Ти>819 значение Тд= ¥).
Алгоритм РИМ
На рис. 2.23 ниже представлена функциональная схема алгоритма РИМ.

Рис. 2.23 Функциональная схема алгоритма РИМ.
Алгоритм используется при построении ПИД-регулятора, работающего в комплекте с исполнительным механизмом постоянной скорости. Алгоритм, как правило, применяется в сочетании с алгоритмом импульсного вывода, который преобразует выходной аналоговый сигнал алгоритма РИМ в последовательность импульсов, управляющих исполнительным механизмом. Помимо формирования закона регулирования в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется, вводится зона нечувствительности.
Звено, выделяющее сигнал рассогласования, суммирует два входных сигнала, при этом один из сигналов масштабируется, фильтруется и инвертируется. Сигнал рассогласования на выходе этого звена (без учета фильтра) равен:
где Км ¾ масштабный коэффициент.
Фильтр нижних частот первого порядка имеет передаточную функцию:
, (4‑6)
где Тф ¾ постоянная времени фильтра.
Зона нечувствительности не пропускает на свой выход сигналы, значения которых находятся внутри установленного значения зоны. Сигнал e2 на выходе этого звена равен:
e2= 0 при | e| £Х D/2;
e2=(|e | - ХD /2)*sign e при | e| >ХD /2, где ХD ¾ зона нечувствительности.
ПДД2 звено имеет передаточную функцию:
где Тм ¾ время полного перемещения исполнительного механизма, движущегося с максимальной скоростью.
В сочетании с интегрирующим исполнительным механизмом, имеющим передаточную функцию Wим(р) = 1/(Тм*р), общая передаточная функция регулятора с алгоритмом РИМ имеет вид:
 ,
,
где Кп, Ти, Кд ¾ соответственно коэффициент пропорциональности, постоянная времени интегрирования и коэффициент времени дифференцирования, равный Кд=Тд/Ти (при Кд*Ти> 819 значение Тд=¥).
Алгоритм имеет 2 выхода. Выход Y ¾ основной выход алгоритма. На выходе Ye формируется отфильтрованный сигнал рассогласования.
4. Алгоритм ЗДН.
На рис. 2.24 ниже представлена функциональна схема алгоритма ЗДН.
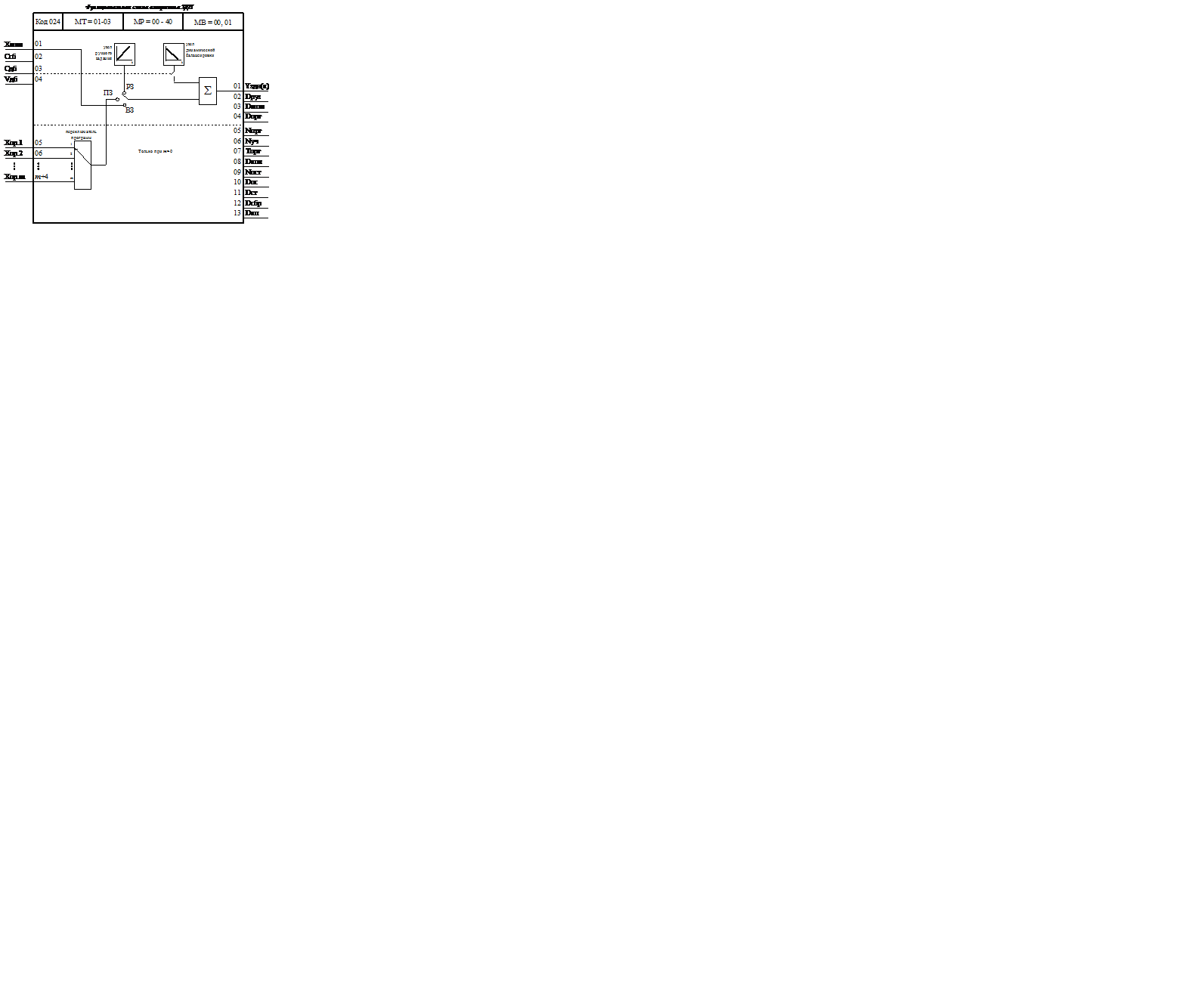
Рис 2.24 Функциональна схема алгоритма ЗДН.
Алгоритм применяется для формирования сигнала ручного задания в контуре регулирования. Через этот алгоритм к регулятору подключаются также программные задатчики и сигнал внешнего задания.
Алгоритм содержит узел ручного задания, узел динамической балансировки, переключатель вида задания и переключатель программ.
Алгоритм РУЧ.
На рис. 2.25 ниже представлена, функциональна схема алгоритма РУЧ.

Рис. 2.25 Функциональна схема алгоритма РУЧ.
РУЧ - Алгоритм предназначен для изменения режимов управления регулятора. С его помощью регулятор переключается в дистанционный или ручной режимы работы.
Алгоритм РУЧ применяется в составе как аналогового, так и импульсного регулятора и используется в сочетании с алгоритмом ОКР.
Алгоритм ОКР
Для того чтобы алгоритмы оперативного управления – РАН, ЗДН, РУЧ - выполняли свои функции, в комплекте с ними необходимо задействовать еще один алгоритм – ОКР– оперативный контроль регулирования. Алгоритм применяется для управления контурами регулирования следующими способами:
-с помощью пульта контроллера ПК-302 (в дальнейшем пульт)
-с помощью команд управления контурами регулирования по интерфейсу с верхнего уровня (программы визуализации данных).
Каждый контур (от 1 до 32) обслуживается своим алгоритмом ОКР. Алгоритм позволяет с помощью клавиш пульта или команд с верхнего уровня изменять режим управления, режим задания, управлять программным задатчиком, изменять выходной сигнал регулятора (в режиме ручного управления), изменять сигнал задания (в режиме ручного задатчика), а также контролировать сигналы задания и рассогласования, входной и выходной сигналы, параметры программы (при программном регулировании) и т.п. На рис. 2.26 представлена схема алгоритма ОКР.

Рис. 2.26 Функциональная схема алгоритма ОКР.
Вход Хруч подключается к основному выходу алгоритма ручного управления РУЧ. Такое соединение обеспечивает изменение режимов управления, а также ручное изменение выхода.
На вход ХВР (выход регулятора) подается сигнал, характеризующий управляющее воздействие. Для аналогового регулятора это может быть тот же выход алгоритма РУЧ или (при наличии датчика положения исполнительного механизма) сигнал на одном из аналоговых входов, к которому подключен датчик положения. Для импульсного регулятора на вход, как правило, подается сигнал от датчика положения. Выходной сигнал контролируется в процентах.
Вход NОК (ошибка контура) используется в том случае, когда необходим контроль выхода одного или нескольких сигналов за допустимый диапазон. Если есть ошибки в контурах регулирования контроллера, то на цифровом индикаторе пульта высвечивается номер контура (первого по возрастанию, в котором встречается ошибка контура). Вход NОК соединяется с выходом алгоблока, содержащим алгоритм порогового контроля ПОР данного контура (см. также описание алгоритма ПОР).
Все перечисленные выше входы (от 01 до 08) задают параметры оперативного управления, как обычного регулятора, так и каскадного регулятора, если он работает в режиме каскадного управления КУ. В последнем случае входы 01-05 определяют параметры ведущего регулятора в каскадной схеме, а входы 06-08 ¾ параметры регулятора в целом. При каскадном регулировании обычно требуется оперативно управлять также и ведомым регулятором. Такая необходимость возникает, когда каскадный регулятор переводится в режим локального управления ЛУ. Возможности управления регулятором в локальном режиме определяются сигналами, подаваемыми на входы 13-17 алгоритма ОКР.
Вход ХЗДЛ обычно соединяется с основным выходом алгоритма локального задания ЗДЛ. В этом случае текущее задание контура принимает значение ХЗДЛ.
Входы ХВХ,Л и Хe,Л задают соответственно сигналы для контура регулирования при ЛУ.
Назначение входов W0,Л и W100,Л такое же, как входов W0 и W100, но для ведомого регулятора в локальном режиме.
Вход ХКАЛ определяет тип сигналов контура. При ХКАЛ равном “0”, сигналы контура представлены в процентах, при ХКАЛ равном “1” ¾ в технических единицах.
Таким образом, с помощью алгоритма ОКР программируются (назначаются) функции и сигналы оперативного управления контуром регулирования. Алгоритм определяет, какие сигналы будут выведены на индикатор пульта и в какой шкале (проценты, технические единицы) эти сигналы (задание, вход и рассогласование) будут индицироваться на пульте или передаваться по интерфейсу на верхний уровень.
Алгоритм ВАМ
Алгоритм ВАМ – ввод с аналоговых входов, применяется для обмен данными с модулем УСО аналогового ввода.
На рис. 2.27 представлена схема алгоритма ВАМ.
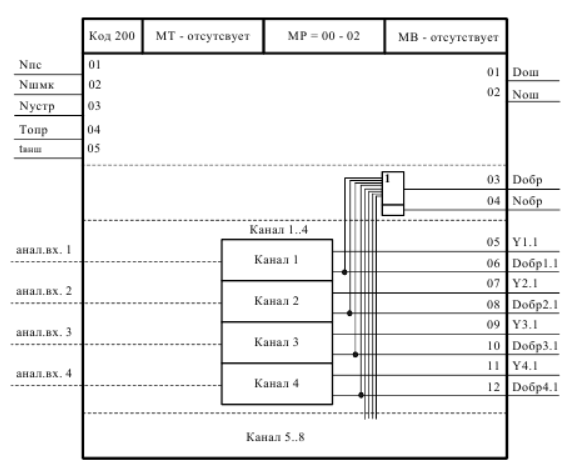
Рис. 2.27 Функциональная схема алгоритма ВАМ.
Алгоритм может применяться для связи с одинарным модулем (4 канала ввода) или двойным (8 каналов ввода). При работе с 4-х канальным модулем модификатор размера МР = 1, при связи с 8-ми канальным модулем МР = 2.
Кроме входов адресации модуля, алгоритм имеет настроечный вход Топр, который предназначен для задания периода опроса модуля и задаётся в секундах. Период опроса автоматически корректируется внутри алгоритма кратно времени цикла контроллера.
В случае использования алгоритма для обмена с модулями, где есть сигналы с датчиков температуры типа термопары и используется температура холодных спаев внешняя (находиться не на клеммах модуля), необходимо использовать вход tвнш. На входе tвнш необходимо указать внешнюю температуру холодных спаев.
Алгоритм на выходах Yi.m индицирует значение входного сигнала, на выходах Dобрi.m индицирует признак обрыва линии связи с датчиком. На выходе Dобр индицируется признак наличия обрыва хотя бы на одном из каналов, на выходе Nобр индицируется номер входа с обрывом.
Алгоритм МДВ
Схема алгоритма модуля дискретного выхода изображена на рис. 2.28
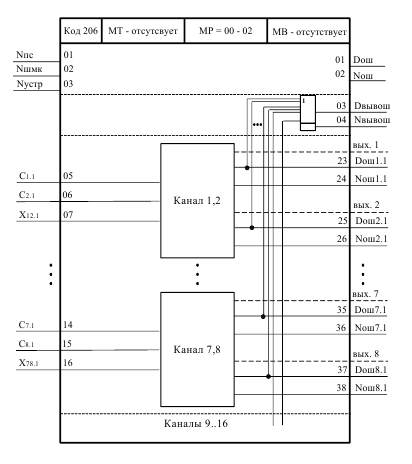
Рис. 2.28. Схема алгоритма МДВ
Алгоритм применяется для обмена данными со следующими модулями УСО: МСД-Д-00 и МСД-Д-01.
На входы Сi.m подаётся значение выхода модуля УСО. На входы Xi.m подаётся аналоговое значение для импульсатора (выхода аналогового регулятора), если пара выходов модуля работают в режиме импульсатора.
На выходе Dвыхi.m индицируется признак ошибки в работе дискретного выхода. На выходе Nвыхi.m индицируется код ошибки в работе дискретного выхода. Модификатор размера МР = 01 для МСД-Д-00, МР = 02 для МСД-Д-01, модификатор типа и масштаб времени отсутствуют.
Алгоритм ЗДЛ
Алгоритм используется в составе каскадного регулятора. Он необходим, если должно предусматриваться переключение каскадного регулятора в локальный режим и ручное изменение задания ведомого регулятора в этом режиме. Функциональная схема алгоритма ЗДН приведена на рис. 2.29.

Рис. 2.29 – Функциональная схема алгоритма ЗДЛ
Алгоритм ФИВ
Функциональная схема алгоритма представлена на рис 2.30

Рис.2.30 Функциональная схема алгоритма ФИВ.
Алгоритм применяется в тех случаях, когда контроллер должен управлять исполнительным механизмом постоянной скорости.
Алгоритм преобразует сигнал, сформированный алгоблоками контроллера (в частности, алгоритм импульсного регулирования), в последовательность импульсов переменной скважности.
Алгоритм выдает последовательность указанных импульсов на свои дискретные выходы Dб (выход “больше”) и Dм (выход “меньше”). Для вывода импульсов на модули УСО алгоритм ФИВ надо использовать совместно с алгоритмом обмена с модулем, имеющим дискретные выходы (выходы алгоритма ФИВ соединить с входами алгоритма обмена с модулем).
Алгоритм содержит несколько каналов связи с выходами контроллера, число которых задается модификатором МР.
Каждый канал алгоритма ФИВ содержит широтно-импульсный модулятор (ШИМ), преобразующий входной сигнал Х в последовательность импульсов со скважностью Q, пропорциональной входному сигналу: Q=X/100. При Х>100% скважность Q=1. Если X>0, импульсы формируются в выходной цепи “больше”, если X<0, то в цепи “меньше”. При Х=0 выходной сигнал равен нулю.
Параметр Т задает минимальную длительность выходного импульса. Этот параметр устанавливается в диапазоне 0 £T£ 4 сек (при ручной установке ¾ с шагом 0,1 сек) и округляется до значения, кратного времени цикла контроллера.
Параметры Тлб и Тлм задают время дополнительного импульса для выборки люфта исполнительного механизма в направлении соответственно “больше” или “меньше” при изменении направления его движения.
Параметры Т, Тлб и Тлм относятся к типу tи (минимальная длительность импульсов), задаются в диапазоне 0£tи£4 сек (при ручной установке ¾ с шагом 0,1 сек) и округляются до значения, кратного времени цикла контроллера. Размерность этих параметров (сек) не зависит от масштаба времени контроллера.
ШИМ алгоритма ФИВ со старшим номером алгоблока имеет более высокий приоритет над остальными в пределах одной группы приоритетны ШИМ со старшими номерами.
Выбор структуры регулятора
При реализации системы автоматического управления на базе контроллера КР-500 возможно использовать два варианта регуляторов – с аналоговым и широтно-импульсным сигналом.
Широтно-импульсная модуляция (ШИМ) – процесс управления мощностью, подводимой к нагрузке, путем изменения скважности импульсов, при постоянной частоте. Один из методов двухуровневой ШИМ с помощью аналогового компаратора. На один из входов компаратора подаётся пилообразное напряжение от вспомогательного генератора, на другой вход — модулирующее напряжение. Состояние выхода компаратора — ШИ-модуляция. На рис. 2.2: сверху — пилообразный сигнал и модулирующее напряжение, снизу — результат ШИМ.
Рис. 2.2 Двухуровневая ШИМ с помощью аналогового компаратора.
Так как для регулирования температуры пара будет использоваться исполнительный механизм постоянной скорости, то ведомый регулятор будет дискретный, с широтно-импульсным выходным сигналом, а ведущий – аналоговый, с унифицированным токовым сигналом (4..20 мА).
Выбор контроллера
На ТЭС АО «Кратонтара» для управления к/а ст. № 3 более 10 лет используется программируемый логический контроллер серии КОНТРАСТ – КР-300.
На рис. 2.13 представлен внешний вид контроллера КР-300Ш – в шкафном исполнении.
Рис. 2.13. Внешний вид контроллера КР-300Ш
На рис. 2.14 представлена структурная схема контроллера КР-300Ш.
Рис. 2.14. Структурная схема контроллера КР-300.
Состав и конструкция контроллера.
Основным блоком контроллеров является блок контроллера БК-Ш.
В состав БК-Ш входят:
каркас с генмонтажной платой;
модуль процессора ПРЦ-301Ш;
от 1 до 3 модулей УСО;
модуль питания МПИ.
На передней панели блока расположены 3 вилки IDСC 24: Гр.1…Гр.3 для ввода – вывода аналоговых и дискретных сигналов. На панели модуля МПИ расположены розетка DB-9 ПУЛЬТ для подключения пульта контроллера ПК-301 и розетка DB-15 ПИТ для подключения питания и приборных цепей. На задней стенке расположен винт заземления.
Блок БУСО-Ш
Блок БУСО-Ш предназначен для увеличения числа входов-выходов контроллеров. Состав контроллеров определяется блоками, модулями и другими изделиями, входящими в его состав.
Конструктивно блоки БК и БУСО выполнены в виде блочного каркаса в контроллере КР-300Ш в которых расположены модули питания, процессора и УСО (до пяти модулей).
Соединение БК-Ш с БУСО-Ш выполняется путем внутреннего подключения между собой. К одному блоку БК-Ш возможно подсоединить до четырех блоков БУСО-Ш.
На рис. 2.15 изображены его установочные размеры:
Рис. 2.15. Установочные размеры контроллера КР-300Ш.
В состав БУСО-Ш входят:
каркас с генмонтажной платой;
от 1 до 4 модулей УСО;
модуль питания МП;
На передней панели блока расположены четыре вилки IDCС-24 (Гр.1…Гр.4) для ввода – вывода аналоговых и дискретных сигналов.
Модули УСО
К устройствам связи с объектом УСО относятся:
модули аналоговых сигналов МАС-3, МАВ;
модуль аналоговых и дискретных сигналов МДА-3;
модуль дискретных сигналов МСД.






