

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Почему при недогрузке асинхронный двигатель работает с малым значением коэффициента мощности? Поясните, используя векторную диаграмму.
На выделенном фиктивном сопротивлении образуется, при протекании по нему тока  , механическая мощность (т.е. мощность на валу двигателя). Если двигатель мало закружен то
, механическая мощность (т.е. мощность на валу двигателя). Если двигатель мало закружен то  мала, мощность фиктивного сопротивления тоже мала и при неизменном
мала, мощность фиктивного сопротивления тоже мала и при неизменном  это возможно в том случае, если ток мал. Следовательно, для малозагруженного двигателя можно цепь (
это возможно в том случае, если ток мал. Следовательно, для малозагруженного двигателя можно цепь (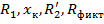 ) удалить, останется только цепь намагничивания из сопротивлений X₀, R₀, и для двигателя нормального исполнения коэффициент мощности цепи намагничивания не превышает 0,3 – это минимальный cosφ с которым может работать двигатель, а малозагруженный двигатель будет к нему приближаться.
) удалить, останется только цепь намагничивания из сопротивлений X₀, R₀, и для двигателя нормального исполнения коэффициент мощности цепи намагничивания не превышает 0,3 – это минимальный cosφ с которым может работать двигатель, а малозагруженный двигатель будет к нему приближаться.
4.8. Почему напряжение синхронных генераторов в значительно большей степени зависит от тока нагрузки, чем у генераторов постоянного тока? Каков физический смысл имеет параметр - отношение короткого замыкания (О.К.З.)? Определите ток короткого замыкания синхронного генератора, работающего без регулятора напряжения, если его напряжение на холостом ходу равно номинальному, а О.К.З.=1,1.
 Для сопоставления выберем ГПТ с независимым возбуждением.
Для сопоставления выберем ГПТ с независимым возбуждением.
Нужно рассмотреть внешнюю характеристику генератора  . Эта характеристика выглядит падающей. Чем больше нагружаем тем меньше напряжение.
. Эта характеристика выглядит падающей. Чем больше нагружаем тем меньше напряжение.
ΔU₁ - падение напряжения на проводниках обмотки якоря, как имеющих активное сопротивление  ;
;
ΔU₂ - падение напряжения, вызванное реакцией якоря. Реакцией якоря называется добавление к магнитному полю обмотки возбуждения (основное поле) магнитного поля  , созданного протекающими по якорю токами.
, созданного протекающими по якорю токами.
Для СГ внешняя характеристика имеет круто падающий вид по сравнению с ГПТ.
 ΔU₁ - потеря напряжения в проводниках обмотки статора;
ΔU₁ - потеря напряжения в проводниках обмотки статора;
ΔU₂ - потери на индуктивном сопротивлении рассеяния обмотки статора
ΔU₃ - потери на реакции якоря.
 Потери на реакции якоря по сравнению с ГПТ намного выше у СГ. Они настолько велики, что если замкнуть накоротко СГ, то установившийся ток короткого замыкания будет в районе номинального (от 1,5 до 1,8), если ГПТ закоротить то ток вырастет в 20..30 раз по сравнению с номинальным. Напряжения ΔU₁, ΔU₂, ΔU₃ выделяются как на активном так и на индуктивном сопротивлениях, поэтому они складываются геометрически Это объясняет саблеобразный вид естественной характеристики.
Потери на реакции якоря по сравнению с ГПТ намного выше у СГ. Они настолько велики, что если замкнуть накоротко СГ, то установившийся ток короткого замыкания будет в районе номинального (от 1,5 до 1,8), если ГПТ закоротить то ток вырастет в 20..30 раз по сравнению с номинальным. Напряжения ΔU₁, ΔU₂, ΔU₃ выделяются как на активном так и на индуктивном сопротивлениях, поэтому они складываются геометрически Это объясняет саблеобразный вид естественной характеристики.
ОКЗ представляет собой установившееся значение тока КЗ в относительных единицах к номинальному току, если КЗ произошло из режима ХХ генератора. 
При включении трансформатора в сеть иногда отключается автомат защиты от перегрузки. Почему? Является ли это признаком потери работоспособности трансформатора? Какую роль играет параметр напряжение короткого замыкания, который обязательно указывается в сертификате.
Трансформатор на холостом ходу состоит из сопротивлений только цепи намагничивания:
Если составить ДУ для трансформатора 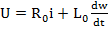 , а затем использовать определение индуктивности как отношение потокосцепления к току:
, а затем использовать определение индуктивности как отношение потокосцепления к току:  можно ДУ записать для потокосцеплений:
можно ДУ записать для потокосцеплений:

Величина To зависит от мощности трансформатора:
До 10кВт – То= до 0,1-0,2 сек.
До 100кВт – То= до 0,5-0,6 сек.
До 1000кВт – То= ~1 сек.
Свыше 1000кВт – То= до 2-5 сек.
Если решить ДУ относительно потокосцеплений Ψ, то решение будет состоять из принужденной и свободной составляющих. Принужденная- синусоидальная, т.к. напряжение U подключаемое к трансформатору синусоидальное.
Свободная- экспонента с То
При превышении в ПП потокосцепления Ψ на 0.4-0.7 из-за нелинейности кривой намагничивания амплитуда тока повышается в 5-10 крат. Если Т  большая, то импульсы повышенного тока медленно затухают и трансформатор долго находится под большим током.
большая, то импульсы повышенного тока медленно затухают и трансформатор долго находится под большим током.
В данном вопросе Uкз никакой роли не играет.
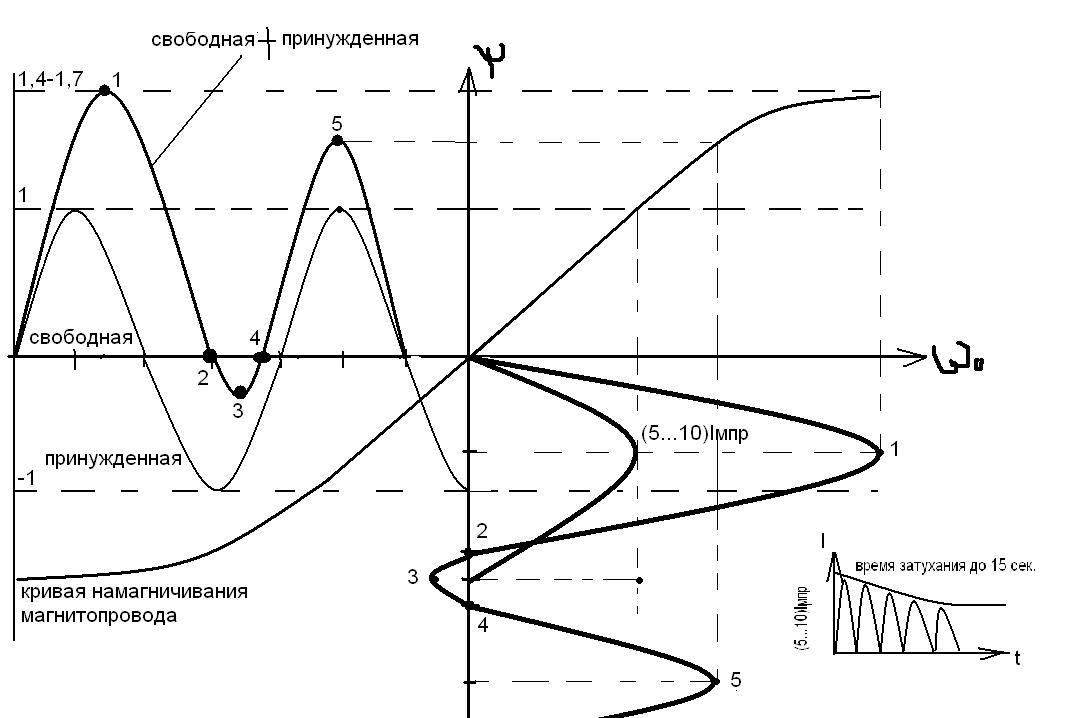
Привести механические характеристики двухскоростного асинхронного двигателя с переключением числа пар полюсов с треугольника на двойную звезду. Показать траекторию перехода рабочей точки с высшей скорости на низшую при номинальном моменте. Пояснить, когда разгонится двигатель быстрее в одну ступень или в две на высшую скорость.
При указанном переключении обмоток сохраняется мощность на валу. Причем на треугольнике обмоток число пар полюсов в 2 раза больше, чем при двойной звезде.
Траектория перехода с высшей скорости на низшую:
1-2 – переход в результате переключения обмоток(скорость не меняется)
2-3 – генераторное торможение с рекуперацией энергии
3-4 - двигательный режим с пониженной частотой до точки 4.
Разгон в 1 ступень (сразу на высокоскоростной обмотке)
Время разгона  . От точки 5 до точки 6 избыточный момент
. От точки 5 до точки 6 избыточный момент 
После точки 6 до точки 1 – разгон осуществляется быстрее, т.к. Мизб2 увеличивается.
Разгон в 2 ступени.
Сначала включается низкоскоростная обмотка и работают на ней до точки 6, а потом переключается на высокоскоростную. Т.к. избыточный момент на участке 5-6 существенно вырос, то время разгона до точки 6 сократится в несколько раз по сравнению с предыдущим пунктом. От тоски 6-до точки1 разгон происходит как и в предыдущем случае.
ДВИГАТЕЛЬ РАЗГОНИТСЯ БЫСТРЕЕ В 2 СТУПЕНИ
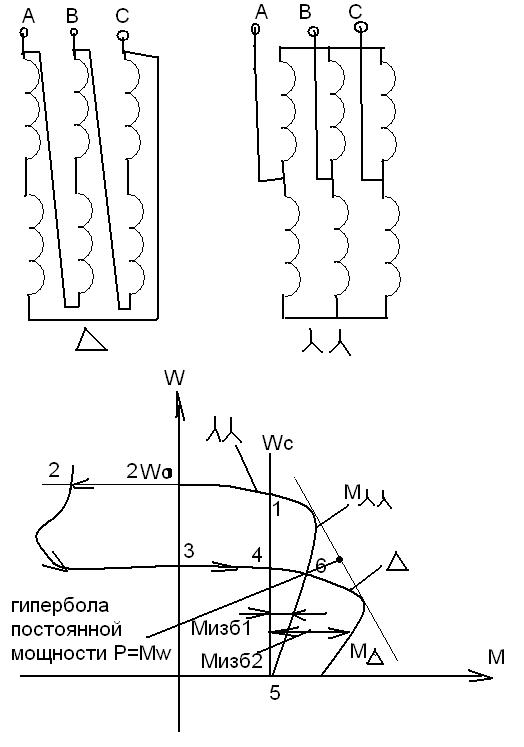
Машина постоянного тока имеет явно выраженную замедленную коммутацию. Каким будет при этом характер искрения щеток? Как улучшить коммутацию (приблизить к прямолинейному характеру) посредством изменения степени действия добавочных полюсов (ДП) генератора?
Рассмотрим ГПТ:
Положение А: по секции протекает ток(против часовой стрелки) и с левой стороны секции через коллектор-щетку ток выходит наружу в виде Iкол.
На петушке в правой секции In=0
Положение Б: коллекторные пластины закорочены щеткой =>создан КЗ-контур =>создается эдс генератора. В КЗ-контуре устанавливается ток в обеих секциях.
В КЗ контуре устанавливается ток в обоих секциях.
Изменению тока в секции препятствует еси(эдс самоиндукции).Ток изменяется практически по линейному закону. Iл- падает, Iп- растет.
Положение В аналогично А-ток протекает по правой пластине коллектора.
Если к моменту перехода схемы от Б к В ток левой секции не уменьшается до 0, то при сходе щетки с левой пластины коллектора возникает дуга- ЯВЛЕНИЕ ЗАМЕДЛЕННОЙ КОММУТАЦИИ, т.к. Тс в секции окажется большой Тс=Rc/Lc. Это явления хуже следующего.
Если к моменту схода с пластины щетки ток левый Iл не только уменьшается до 0, но с становится противоположного направления- УСКОРЕННАЯ КОММУТАЦИЯ. При сходе щетки с пластины также возникнет ДУГА. Если учесть сопротивление щеточного контакта то окажется что худшее действие оказывает замедленная коммутация, у нее дуга более текучая т.к. постоянная времени в секции окажется большей Тс=Rc/Lc. При ускоренно коммутации Тс мало, и если возникает дуга то она быстро гаснет.
Для уменьшения искрения необходимо применить дополнительные полюса. При установке дополнительных полюсов достигается главная цель: уменьшается евр той секции, коллекторные пластины которой соприкасается со щеткой.
Малая эдс евр- создает малый ток в кз-секции, соответственно будет малая дуга.
4.15. Что произойдет с работой трехфазного асинхронного электропривода, имеющего вентиляторную нагрузку на валу (рис.), если в процессе нормальной работы произойдет обрыв одной из фаз (например, сгорел предохранитель в одной из фаз)?
ВВОДНАЯ ЧАСТЬ
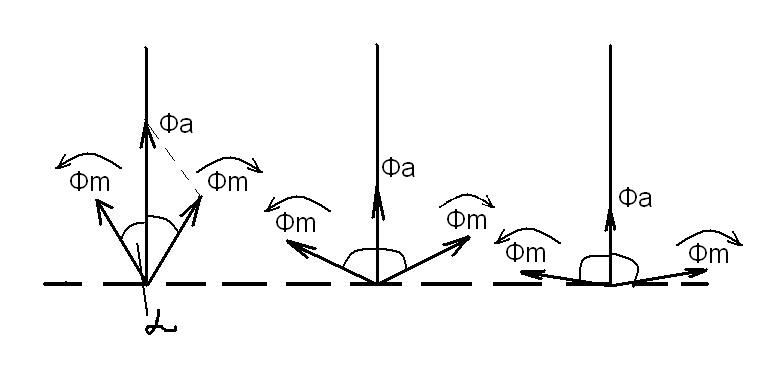
Магнитный поток в фазе А:
-всегда на оси катушки
-не вращается
-его можно представить в виде 2х одинаковых по амплитуде вращающихся в противоположные стороны полей



Рассмотрим фазу B
Поток Фмв(ß) имеет по отношению к оси B 
Противоположно вращающийся поток  симметричен относительно оси В.
симметричен относительно оси В.
Рассмотрим фазу C
Поток Фмс(ß) имеет по отношению к оси C 
Вращаемся на  и получаем Фмс(à). Поток
и получаем Фмс(à). Поток  располоден симметрично относительно оси С.
располоден симметрично относительно оси С.
Эти построения справедливы с 3мя целыми обмотками (норм АД)
Построения приведены ниже
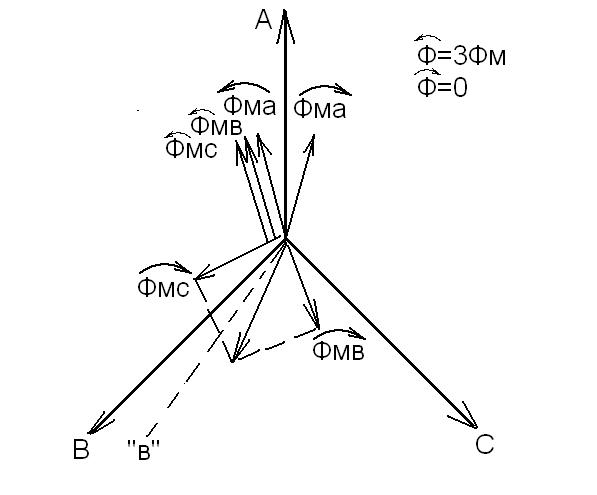
1.Пусть оборвется обмотка фазы А (Uф- не изменилось). В этом случае Фма(ß),Фма(à) исчезнут и значения полей будут следующими:
Ф (ß)=2 Фм(ß)
Ф(à)=Фм(à)
От одного снижения Ф(ß) момент уже уменьшится в:
Строим механические характеристики:
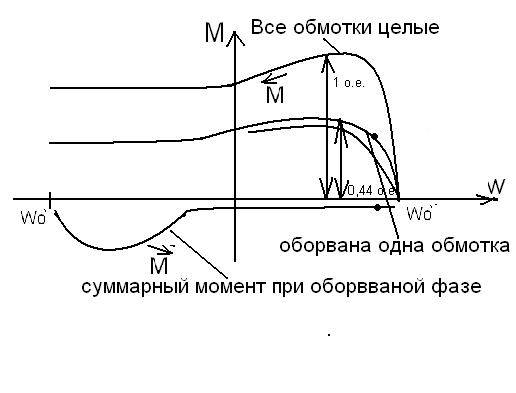
По сравнению с моментов, когда все обмотки целые, момент будет равен 40% => двигатель будет вращаться.
Если учесть тот факт, что напряжение фазных обмоток (220 В)уменьшится до половины линейного (190 В), то момент еще уменьшится в ¾ раз (=  )²).
)²).
Окончательно Мвр упадет до 30%, судя по графику 15-4 двигатель скорее всего остановится. 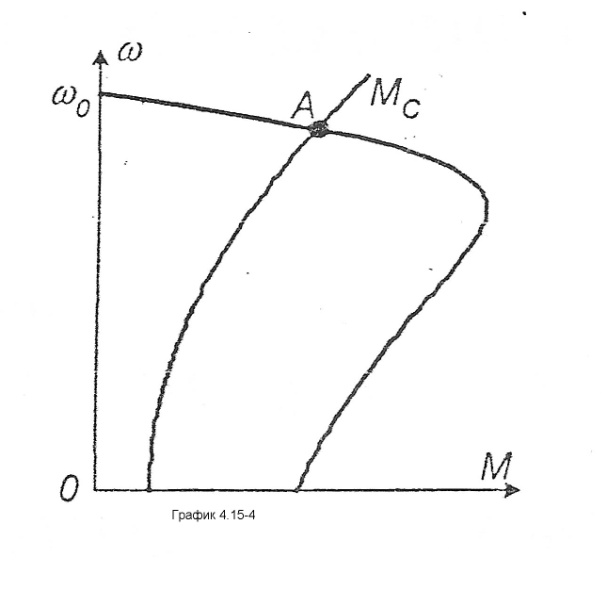
Что такое модальное управление электроприводом? Приведите характеристики электропривода, настроенного на технический и симметричный оптимум: графики переходных процессов, значений ошибок регулирования, величин времени регулирования и заброса.
На рис.2.1 приведена обобщенная структурная схема ЭП замкнутого типа, в которой источник питания и двигатель образуют силовую часть (СЧ) ЭП.
Метод последовательной коррекции заключается в том, что регулятор включен последовательно с силовой частью. Достоинствами метода последовательной коррекции являются:
 1. Регулятор содержит только маломощные элементы.
1. Регулятор содержит только маломощные элементы.
2. Синтез передаточной функции регулятора Wрег(р) наиболее прост.
3. Реализация регулятора по определенной таким образом передаточной функции Wрег(р) наиболее проста.
Метод модального управления состоит в том, что передаточная функция разомкнутого контура ЭП Wраз(р) имеет стандартный вид – моду.
В автоматизированном электроприводе (АЭП) применяются две моды, называемые настройками на технический и симметричный оптимумы.
Настройка на технический оптимум
Передаточная функция разомкнутой САУ ЭП имеет вид
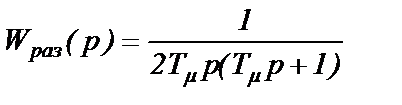 , (2.1)
, (2.1)
где Тμ - малая постоянная времени, входящая в передаточную функцию Wсч(р) силовой части.
Переходный процесс замкнутой САУ ЭП (рис.2.2, график 1) имеет следующие динамические характеристики:
tp.тo=4,7 Тμ, σто=4,3 % (2.2)
АЭП является астатическим 1-го порядка (сомножитель р в знаменателе передаточной функции Wраз(р) имеет первый порядок), поэтому статическая ошибка регулирования равна нулю.
Переходный процесс описывается формулой
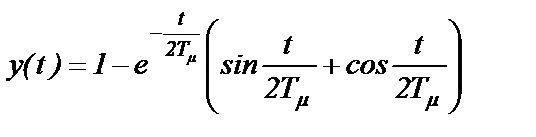 (2.3)
(2.3)

Произведем расчет передаточной функции регулятора Wрег(р), задаваясь различными передаточными функциями Wсч(р).
Будем использовать передаточную функцию силовой части следующего общего вида
 , (2.4)
, (2.4)
в которой постоянная времени T1 меньше всех остальных: T1<{T2, T3,…,Tn}.
Обозначим наименьшую постоянную времени как Тμ=Т1. Остальные постоянные времени назовем большими постоянными времени.
1). Пусть в Wсч(р) имеется только одна большая постоянная времени Т2. Передаточная функция силовой части примет вид
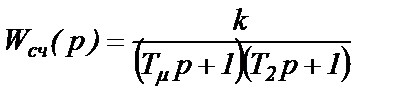 (2.5)
(2.5)
Так как регулятор и силовая часть включены последовательно, то
 и
и  (2.6)
(2.6)
Вычисляем
 (2.7)
(2.7)
Синтезирован ПИ-регулятор с коэффициентом передачи kП пропорциональной части и постоянной времени ТИ интегральной части. Этот регулятор реализуется на основе операционного усилителя.
2). Пусть в Wсч(р) имеется две больших постоянных времени Т2 и Т3. Передаточная функция силовой части примет вид
 (2.8)
(2.8)
Вычисляем
 (2.9)
(2.9)
Синтезирован ПИД-регулятор с коэффициентом передачи kП пропорциональной части, постоянной времени ТИ интегральной части и постоянной времени ТД дифференциальной части. Этот регулятор реализуется на основе операционного усилителя. Из-за Д-части регулятор чувствителен к помехам.
Асинхронно вентильный каскад электропривода, содержащего АД с фазным ротором. Как с помощью инвертора напряжения ведомого сетью регулируется частота вращения АД? Почему к.п.д. асинхронно-вентильного каскада выше к.п.д. электропривода с реостатами в цепи ротора АД?
В регулировочных режимах в сопротивлении RP выделятся тепло. Мощность тепловыделений равна произведению напряжения URP на сопротивлении RP и тока IRP через него (что и уменьшает КПД). Эту мощность можно с помощью инвертора напряжения преобразовать в мощность переменного тока и отдать (рекуперировать) ее в сеть. Наиболее простое решение рекуперации энергии достигается на ведомом сетью инверторе напряжения.
Схема асинхронно-вентильного каскада (АВК) содержит (рис.19.1) АД, в цепи фазного ротора которого имеется неуправляемый выпрямитель, и ведомый сетью инвертор напряжения на базе управляемого выпрямителя.
К инвертору от выпрямителя ВКД (вентильного комплекта двигателя) подведена э.д.с., пропорциональная скольжению s АД. Угол опережения β инвертора выбирается таким, чтобы между напряжениями ВКД и ВКИ соблюдалось соотношение  . Инвертор, состоящий из вентильного комплекта ВКИ и согласующего трансформатора Тр, потребляет мощность постоянного тока
. Инвертор, состоящий из вентильного комплекта ВКИ и согласующего трансформатора Тр, потребляет мощность постоянного тока  и эта мощность, но уже на переменном токе, подведена к нижним (по схеме) обмоткам трехфазного трансформатора и затем трансформируется в обмотки, подсоединенные к сети. Таким образом, мощность цепи ротора АД, которая в схемах на рис.18.2 и рис.18.3 рассеивалась в виде тепловой мощности в регулировочном резисторе RР, в схеме АВК отдается в сеть. К.п.д. АВК во всем диапазоне частот вращения АД поддерживается на максимально достижимом уровне – порядка 0,85…0,95.
и эта мощность, но уже на переменном токе, подведена к нижним (по схеме) обмоткам трехфазного трансформатора и затем трансформируется в обмотки, подсоединенные к сети. Таким образом, мощность цепи ротора АД, которая в схемах на рис.18.2 и рис.18.3 рассеивалась в виде тепловой мощности в регулировочном резисторе RР, в схеме АВК отдается в сеть. К.п.д. АВК во всем диапазоне частот вращения АД поддерживается на максимально достижимом уровне – порядка 0,85…0,95.
 САР частоты вращения АД на базе АВК может быть вполне удовлетворительным даже, если она выполнена по схеме разомкнутого типа, так как механические характеристики схемы АВК близки к характеристикам частотного управления, приведенными на рис.13.3в, что доказывается ниже.
САР частоты вращения АД на базе АВК может быть вполне удовлетворительным даже, если она выполнена по схеме разомкнутого типа, так как механические характеристики схемы АВК близки к характеристикам частотного управления, приведенными на рис.13.3в, что доказывается ниже.
У АД, не используемого в АВК, существует только одно значение скольжения холостого хода на естественной характеристике sXXе=0, при котором вращающий момент АД нулевой. У АД, используемого в АВК, на искусственных механических характеристиках существует бесконечно много значений скольжения холостого хода sXXβ, при котором вращающий момент АД нулевой, и эти скольжения зависят от угла опережения β инвертора. Действительно, вращающий момент М АД обращается в ноль, если во всех его роторных обмотках токи нулевые и, следовательно, нулевой ток Id (рис.19.1). Ток Id согласно рис.19.1 равен  (19.1)
(19.1)
где RЭ – эквивалентное сопротивление цепи протекания тока Id.
 Ток Id обращается в ноль согласно (19.1) при скольжении
Ток Id обращается в ноль согласно (19.1) при скольжении  (19.2)
(19.2)
Только при β=90О скольжение sXXβ=0 и совпадает с sXXе=0 для АД без АВК.
 Жесткость искусственных механических характеристик, как показывают расчеты, уменьшается при увеличении скольжения sXXβ. Зная скольжения sXXβ холостого хода естественной или искусственных механических характеристик, можно рассчитать частоты вращения холостого ωХХ хода для этих характеристик по формуле
Жесткость искусственных механических характеристик, как показывают расчеты, уменьшается при увеличении скольжения sXXβ. Зная скольжения sXXβ холостого хода естественной или искусственных механических характеристик, можно рассчитать частоты вращения холостого ωХХ хода для этих характеристик по формуле
 (19.3)
(19.3)
где ω0 - частота вращения магнитного поля статора.
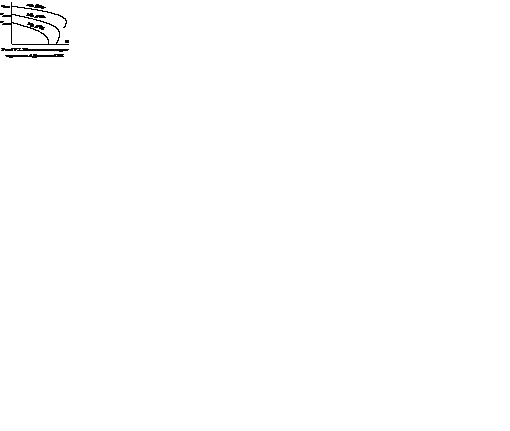
Механические характеристики АД, включенного в схему АВК, приведены на рис.19.2. Из них следует, что для повышения частоты вращения АД в схеме разомкнутого типа нужно увеличить угол опережения β. С увеличением β значение входного напряжения инвертора  уменьшится и при неизменном значении выходного напряжения
уменьшится и при неизменном значении выходного напряжения  ВКД ток Id согласно (19.1) увеличится, увеличится далее вращающий момент двигателя и частота вращения будет возрастать. Значение напряжение на кольцах ротора и, следовательно, будут уменьшаться.
ВКД ток Id согласно (19.1) увеличится, увеличится далее вращающий момент двигателя и частота вращения будет возрастать. Значение напряжение на кольцах ротора и, следовательно, будут уменьшаться.
Для уменьшения частоты вращения угол β нужно уменьшать, увеличив тем самым, входное напряжение ВКИ. Ток Id уменьшится, уменьшится вращающий момент М и частота вращения АД будет понижаться.
Более качественное регулирование частоты вращения АД с любой жесткостью механических характеристик АЭП и другими заданными показателями качества, например, показателями качества модального управления, может быть достигнуто при включении схемы АВК (рис.19.1) в контур регулирования скорости. Схема САР частоты вращения с использованием АВК приведена на рис.19.3. Она подобна схеме с рис.18.3 с тем отличием, что СИФУ управляет тиристорами вентильного комплекта ВКИ инвертора АВК.
Скалярные системы автоматического управления асинхронными двигателями базируются только на прямом учете параметров механических переходных процессов, но они не учитывают в полном объеме электрические и электромеханические процессы. Для мощных АД, имеющих значительную электрическую инерцию, а также для электроприводов, к которым предъявляются высокие требования к динамическим процессам, сложно реализовать качественный АЭП без учета электрических переходных процессов. Такие требования могут быть учтены, если использовать полные дифференциальные уравнения обмоток АД, что реализовано в системах векторного управления АД.
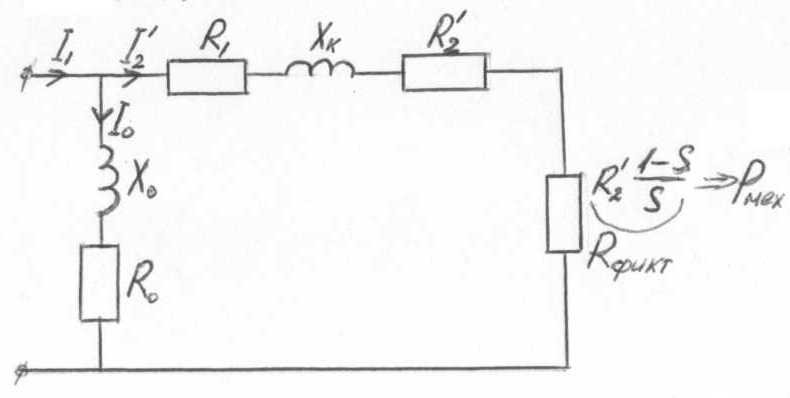
Почему при недогрузке асинхронный двигатель работает с малым значением коэффициента мощности? Поясните, используя векторную диаграмму.
На выделенном фиктивном сопротивлении образуется, при протекании по нему тока , механическая мощность (т.е. мощность на валу двигателя). Если двигатель мало закружен то мала, мощность фиктивного сопротивления тоже мала и при неизменном это возможно в том случае, если ток мал. Следовательно, для малозагруженного двигателя можно цепь () удалить, останется только цепь намагничивания из сопротивлений X₀, R₀, и для двигателя нормального исполнения коэффициент мощности цепи намагничивания не превышает 0,3 – это минимальный cosφ с которым может работать двигатель, а малозагруженный двигатель будет к нему приближаться.
4.8. Почему напряжение синхронных генераторов в значительно большей степени зависит от тока нагрузки, чем у генераторов постоянного тока? Каков физический смысл имеет параметр - отношение короткого замыкания (О.К.З.)? Определите ток короткого замыкания синхронного генератора, работающего без регулятора напряжения, если его напряжение на холостом ходу равно номинальному, а О.К.З.=1,1.
Для сопоставления выберем ГПТ с независимым возбуждением.
Нужно рассмотреть внешнюю характеристику генератора . Эта характеристика выглядит падающей. Чем больше нагружаем тем меньше напряжение.
ΔU₁ - падение напряжения на проводниках обмотки якоря, как имеющих активное сопротивление ;
ΔU₂ - падение напряжения, вызванное реакцией якоря. Реакцией якоря называется добавление к магнитному полю обмотки возбуждения (основное поле) магнитного поля , созданного протекающими по якорю токами.
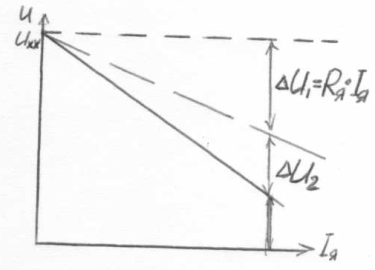
Для СГ внешняя характеристика имеет круто падающий вид по сравнению с ГПТ.
ΔU₁ - потеря напряжения в проводниках обмотки статора;
ΔU₂ - потери на индуктивном сопротивлении рассеяния обмотки статора
ΔU₃ - потери на реакции якоря.
Потери на реакции якоря по сравнению с ГПТ намного выше у СГ. Они настолько велики, что если замкнуть накоротко СГ, то установившийся ток короткого замыкания будет в районе номинального (от 1,5 до 1,8), если ГПТ закоротить то ток вырастет в 20..30 раз по сравнению с номинальным. Напряжения ΔU₁, ΔU₂, ΔU₃ выделяются как на активном так и на индуктивном сопротивлениях, поэтому они складываются геометрически Это объясняет саблеобразный вид естественной характеристики.
ОКЗ представляет собой установившееся значение тока КЗ в относительных единицах к номинальному току, если КЗ произошло из режима ХХ генератора.
При включении трансформатора в сеть иногда отключается автомат защиты от перегрузки. Почему? Является ли это признаком потери работоспособности трансформатора? Какую роль играет параметр напряжение короткого замыкания, который обязательно указывается в сертификате.
Трансформатор на холостом ходу состоит из сопротивлений только цепи намагничивания:
Если составить ДУ для трансформатора , а затем использовать определение индуктивности как отношение потокосцепления к току: можно ДУ записать для потокосцеплений:
Величина To зависит от мощности трансформатора:
До 10кВт – То= до 0,1-0,2 сек.
До 100кВт – То= до 0,5-0,6 сек.
До 1000кВт – То= ~1 сек.
Свыше 1000кВт – То= до 2-5 сек.
Если решить ДУ относительно потокосцеплений Ψ, то решение будет состоять из принужденной и свободной составляющих. Принужденная- синусоидальная, т.к. напряжение U подключаемое к трансформатору синусоидальное.
Свободная- экспонента с То
При превышении в ПП потокосцепления Ψ на 0.4-0.7 из-за нелинейности кривой намагничивания амплитуда тока повышается в 5-10 крат. Если Т большая, то импульсы повышенного тока медленно затухают и трансформатор долго находится под большим током.
В данном вопросе Uкз никакой роли не играет.
Привести механические характеристики двухскоростного асинхронного двигателя с переключением числа пар полюсов с треугольника на двойную звезду. Показать траекторию перехода рабочей точки с высшей скорости на низшую при номинальном моменте. Пояснить, когда разгонится двигатель быстрее в одну ступень или в две на высшую скорость.
При указанном переключении обмоток сохраняется мощность на валу. Причем на треугольнике обмоток число пар полюсов в 2 раза больше, чем при двойной звезде.
Траектория перехода с высшей скорости на низшую:
1-2 – переход в результате переключения обмоток(скорость не меняется)
2-3 – генераторное торможение с рекуперацией энергии
3-4 - двигательный режим с пониженной частотой до точки 4.
Разгон в 1 ступень (сразу на высокоскоростной обмотке)
Время разгона . От точки 5 до точки 6 избыточный момент
После точки 6 до точки 1 – разгон осуществляется быстрее, т.к. Мизб2 увеличивается.
Разгон в 2 ступени.
Сначала включается низкоскоростная обмотка и работают на ней до точки 6, а потом переключается на высокоскоростную. Т.к. избыточный момент на участке 5-6 существенно вырос, то время разгона до точки 6 сократится в несколько раз по сравнению с предыдущим пунктом. От тоски 6-до точки1 разгон происходит как и в предыдущем случае.
ДВИГАТЕЛЬ РАЗГОНИТСЯ БЫСТРЕЕ В 2 СТУПЕНИ
|
|
|

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
© cyberpedia.su 2017-2025 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

