Для определения минимального и достаточного количества признаков вначале из всех предварительно отобранных необходимо исключить явно нерациональные (табл. 4.2) (например, с точки зрения сложности их выявления и контроля или которые дублируют другие признаки и т.д.). Затем из оставшихся признаков в минимально необходимую и достаточную группу отбирают такие, которые несут максимум информации при каждой очередной проверке. Процесс отбора в минимально необходимую и достаточную группу прекращают, как только отобранные признаки в сумме окажутся способными нести информацию обо всех состояниях контролируемого объекта. Описанный подход к определению минимального количества контролируемых параметров (признаков состояния) нашел наибольшее распространение, именно поэтому ниже он рассматривается детально.
Таблица 4.2
| Параметры
| Состояния
| Информативность
|
| S1
| S2
| S3
| S4
| S5
| Ixi
| Zxi
|
| X1
|
|
|
|
|
|
| 0,72
|
|
| X2
|
|
|
|
|
|
| 0,72
|
|
| X3
|
|
|
|
|
|
| 0,72
|
|
| X4
|
|
|
|
|
|
| 0,72
|
|
| X5
|
|
|
|
|
|
|
|
|
| X6
|
|
|
|
|
|
| 0,97
|
|
| X7
|
|
|
|
|
|
| 0,97
|
|
| X8
|
|
|
|
|
|
| 0,72
|
|
Для наглядности решать задачу определения минимального количества признаков будем поэтапно, иллюстрируя практическим примером.
На первом этапе анализируются данные предварительно составленной таблицы взаимосвязей состояний и признаков (см. табл. 4.1 лекция 5), а также информативности признаков. При этом зачеркиваются строки, соответствующие следующим признакам (см. табл. 4.2):
· признакам, которые не реагируют ни на одно из состояний, (то есть признакам, содержащим в строке одни нули). В таблице таких признаков нет;
· признакам, которые реагируют на все состояния, (то есть признакам, содержащим в строке одни единицы). В таблице таким признаком является х5 (повышение температуры);
· признакам, которые дублируют другой признак, (то есть имеют одинаковое расположение единиц и нулей). Из двух и более одинаковых по информативности признаков вычеркивают тот (те), которые сложнее контролировать в эксплуатационной практике.
В таблице одинаковыми по информативности являются признаки х2 и х3, а также признаки х6 и х7. В первой группе более сложно контролируемым является признак х3, а во второй - признак х7. Именно эти два признака и должны быть вычеркнуты.
Вычеркнутые строки (а соответственно - вычеркнутые признаки) из дальнейшего рассмотрения исключаются. По результатам первого этапа формируется сокращенная таблица (табл. 4.3).
Таблица 4.3
| Параметры
| Состояния
| Информативность
|
| S1
| S2
| S3
| S4
| S5
| Ixi
| Zxi
|
| X1
|
|
|
|
|
| 0,72
|
|
| X2
|
|
|
|
|
| 0,72
|
|
| X4
|
|
|
|
|
| 0,72
|
|
| X6
|
|
|
|
|
| 0,97
|
|
| X8
|
|
|
|
|
| 0,72
|
|
На втором этапе путем последовательного условного разбиения сокращенной таблицы (матрицы) на ряд более мелких таблиц (подматриц) выполняется отбор необходимого и достаточного количества признаков. Речь идет о последовательном условном разбиении предыдущей таблицы. При каждом разбиении определяется самый информативный признак, включаемый в искомую группу минимально необходимых и достаточных признаков.
Условное разбиение исходной матрицы на подматрицы осуществляется в следующей последовательности:
1. В исходной матрице устанавливается и фиксируется наиболее информативный признак (в нашем примере это X6) (см. таблицу 4.3).
2. Рассматривая строку наиболее информативного и зафиксированного признака, выявляют состояния, на которые данный признак реагирует (в нашем примере это S2, S4 и S5), а также на какие не реагирует (в нашем примере это S1 и S3) (см. таблицу 4.3).
3. Состояния, на которые наиболее информативный признак реагирует (в нашем примере это S2, S4 и S5), образуют столбцы правой подматрицы (табл. 4.4). Строки правой подматрицы образуют те признаки, которые реагируют хотя бы на одно из указанных в столбце состояний (в нашем примере это X2, X4 и X8). Элементами правой подматрицы являются единицы или нули, переписываемые из исходной матрицы (см. табл. 4.3) и стоящие в ней на пересечении соответствующих строк и столбцов.
Таблица 4.4
| Параметры
| Состояния
| Информативность
|
| S2
| S4
| S5
| Zxi
|
| X2
|
|
|
|
|
| X4
|
|
|
|
|
| X8
|
|
|
|
|
4. Состояния, на которые выделенный ранее параметр не реагирует (в нашем примере это S1 и S3), образуют столбцы левой подматрицы (табл. 4.5). Строки левой подматрицы образуют те параметры, которые реагируют хотя бы на одно из указанных в столбцах состояния (в нашем примере это X1 и X4). Элементами левой подматрицы являются единицы или нули, переписываемые из соответствующих мест исходной матрицы (см. табл. 4.3).
5. Для каждого параметра в левой и правой подматрицах рассчитываются показатели информативности параметров (отдельно для каждой подматрицы):
 ,
,
где l - количество подматриц, в которые включен рассматриваемый признак xi;
mi - количество единиц в каждой i -й подматрице по рассматриваемому признаку xi; ni - количество нулей в каждой i -й подматрице по рассматриваемому признаку xi.
Таблица 4.5
| Параметры
| Состояния
| Информативность
|
| S1
| S3
| Zxi
|
| X1
|
|
|
|
| X4
|
|
|
|
Рассчитанные значения Ixi и Zxi по каждому признаку вписываются в соответствующие строки и столбцы подматриц, так как это показано в таблицах 4.4 и 4.5.
6. Условно считая каждую ранее полученную подматрицу за исходную матрицу, повторяются (для каждой подматрицы отдельно) все действия по пунктам 1...5. Итеративное (повторяющееся) дробление на подматрицы повторяется до тех пор, пока реагирование или не реагирование того или иного признака однозначно не укажет на строго определенное состояние контролируемого объекта. Пример такого "ветвящегося" от исходной матрицы процесса дробления представлен на рисунке 14.
7. Решение задачи прекращается, как только путем выделения и фиксирования наиболее информативных признаков будут однозначно указаны все состояния контролируемого объекта.
Третий этап является завершающим. На этом этапе анализируются и оформляются результаты выполнения первых двух этапов. Оформление результатов заключается в заполнении итоговой таблицы. Все состояния контролируемого объекта образуют столбцы (в нашем примере это S1, S2, S3, S4, S5). Все наиболее информативные признаки, выявленные на втором этапе, образуют строки итоговой таблицы (табл. 4.6) (в нашем примере это х1, х2, х6, х8). Элементами итоговой таблицы, проставляемыми на пересечении столбцов и строк, являются символы "+" или "-". Эти символы могут быть легко проставлены, если воспользоваться рис.14.
Таблица 4.6
| Параметры
| Состояния
|
| S1
| S2
| S3
| S4
| S5
|
| X1
| -
|
| +
|
|
|
| X2
|
| -
|
|
| +
|
| X6
| +
| -
| +
| -
| -
|
| X8
|
| +
|
| -
| +
|
|
|
| S1
| S2
| S3
| S4
| S5
|
|
| X1
|
|
|
|
|
|
|
| X2
|
|
|
|
|
|
|
| X4
|
|
|
|
|
|
|
| X6
|
|
|
|
|
|
|
| X8
|
|
|
|
|
|
+ -
|
| S1
| S3
|
|
| S2
| S4
| S5
|
| X1
|
|
|
| X2
|
|
|
|
| X4
|
|
|
| X4
|
|
|
|
|
|
|
|
| X8
|
|
|
|
+ - + -
+ -
Примечание: «+» - если при проверке параметра он в норме; «-» - не в норме
Рис. 14. Схема выявления состояний
На завершающем этапе оформляют матрицу кодов, которую можно понимать и как искомую группу контролируемых параметров и как алгоритм (в матричном виде) поиска места отказа в объекте диагностирования (табл.4.7).
Рассмотренные процедуры формирования достаточного набора контролируемых параметров позволяют заключить:
- подход И.М. Синдеева позволяет уменьшить до минимума число контролируемых параметров (с 7 до 4);
Таблица 4.7
| Параметры
| Состояния
|
| S1
| S2
| S3
| S4
| S5
|
| X1
| -
| +
| +
| +
| +
|
| X2
| +
| -
| +
| +
| +
|
| X6
| +
| -
| +
| -
| -
|
| X8
| +
| +
| +
| -
| +
|
- достаточное число контролируемых параметров оказалось меньше числа состояний объекта, что возможно благодаря комплексному использованию результатов замера параметров при диагностировании объекта;
- таблица кодов представляет эффективный алгоритм поиска места отказа в системе. Так, при наличии отказа в системе необходимо замерить четыре параметра (X1, X2, X6 и X 8). Если параметр X1 окажется не в норме, а три другие параметра (X2, X6 и X8) - в норме, то произошло событие S1 (отказ блока №1). Если после замеров четырех параметров параметры X1 и X8 окажутся в норме, а параметры X2 и X6 - не в норме, то произошло событие S2 - отказ блока №2 и т.д.
Необходимо отметить, что в соответствии с ГОСТ алгоритмы поиска места отказа обычно оформляют в виде графической схемы. Пример такой схемы алгоритма представлен на рис.15.
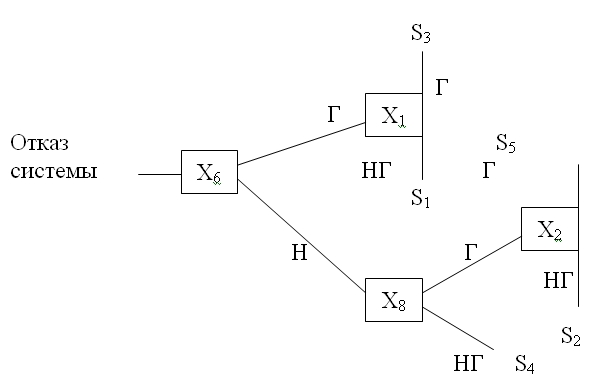
Рис. 15. Схема алгоритма поиска места отказа:
Г - проверяемый параметр «годен» (соответствует требованиям документации);
НГ - проверяемый параметр «не годен»;
Хi - i -ый проверяемый параметр;
Sj - отказ j -ой сборочной единицы (агрегата).






