Система сходяихся сил
Система сил линии действия которых пересекаються в одной точке называються сходящимися.
Согласно аксиоме 3 (присоеденения) перенесем по линии их дествия в точку О
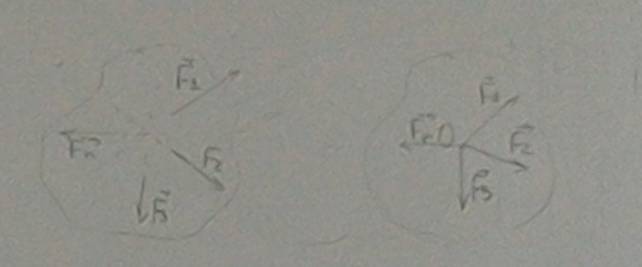
Таким образом любую систему сил, приложенных в разных точках тела можно заменить эквивалентной системо сходящихся сил, сходщихся в одной точка.
Равнодествующая R, систеы сходящихся сил, будет определяться по правилу многоугольника. Последовательность откладывания сил при построении многоугольника произвольная. При этом может изменятьс форма многоугольника, но направление и значение равнодействующих (замыкающего звена) останеться постояйнной.
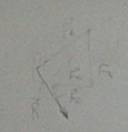
Следовательное равноддействующая какого угодно чесла сил, приложенных в одной точке, будет приложенна в той же точке, и равна геометрической сумме этих сил
Сложение сходяися сил по правилу многоугольника можно рассматривать так же, как результат последовательного сложения. Данных сил по правилу треугольника.
При решении задач можно использовать анатлитический метод. То есть рассматривать проэкции сил.
Прэкция замыкающего звена многоугольника на какую либо ось равна алгеобраической сумме проэкций сил на эти же оси.
Силовой многоугольник.
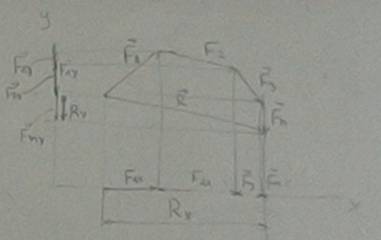
Rx=F1x+F2x+F3x+….Fnx=ΣFix
Ry=F1y+F2y+F3y+….Fny=ΣFix
определяет велечину равнодествующей R
Условия системы сходящихся сил.
Система находистья в равновесии если силовой многоугольник, построенный на соотвствующих силах, этой системы.
Мы расматриваем наш силово многоугольник замкнутым.
В таком случае R=0
В плоскости
Rx=0, Ry=0
В пространстве
Rx=0 Ry=0 Rz=0
Условия равновесия системы сходящихс сил на плоскости
ΣХi=0
ΣYi=0
Сумма проэкций всех сил, действющих на тело на оси х и у равны нулю.
В пространственой системе равны на оси x y и z.
Если сил больше чем уравнени (ольше трех тогда урованине статисечкие неопредленимая).
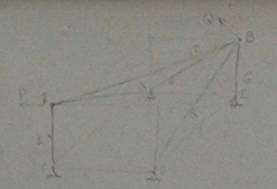
Тогда применяеться метод вырезания узлов.
Разбивает на два узла: Уел А и узел В.
Дано Q, P
Вводим углы.
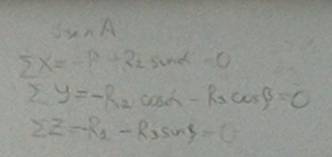
Узел А
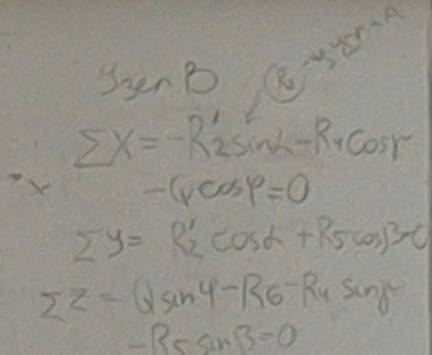
Узел В
Произвольная плоская система сил.
Момент силы.
Раличают следующие виды моментов силы:
1.алгебраический момент силы относительно центра. (относительно точки).
2.Векторный момент силы относительно центра. (относительно точки)
3. Момент силы относительно оси. (для пространственных систем)
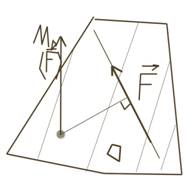 Момент силы относительно точки (векторна форма) — это вектор численно равный произведению модуля силы на плечо т. е. На кратчайшее расстояние от точки до линии действия силы. Вектор момента направлен перпендикулярно плоскости, проходящей через данную точку и силу. Направление вектора выбирается таки образом что бы с его острия видеть вращение, совершаемое силой в направлении против хода часовой стрелки.
Момент силы относительно точки (векторна форма) — это вектор численно равный произведению модуля силы на плечо т. е. На кратчайшее расстояние от точки до линии действия силы. Вектор момента направлен перпендикулярно плоскости, проходящей через данную точку и силу. Направление вектора выбирается таки образом что бы с его острия видеть вращение, совершаемое силой в направлении против хода часовой стрелки.
Момент силы характеризует ее вращательно движение
Алгеброический момент силы(относительно (.) О - это взятая со знаками (+) и (—) скалярная величина равная произведению модуля силы на ее плече.
 Плече относительно которого вычелсяеться алгеброический момент наываеться моментной точкой.
Плече относительно которого вычелсяеться алгеброический момент наываеться моментной точкой.
Если сила поворачивает тело против хода часовой стрелки то накк момента (+). Если по ходу часов стрелки то знак момента (-).
Теорема Вариньона.
Различают следующие виды теоремы Вариньона.
-Для плоской системы
-Для пространствено системы.
Свойства пары сил.
1.Не изменяя действие пары сил на твердое тело, пару можно переносить в любое место в плоскости ее действия.
2. не изменяя действия оказываемого на твердое тело пару сил можно переносить в дугую плоскость.
3.Действие пары сил на твердое тело характеризуется моментом пар.
Момент пары на схемах изображаеться в виде дуговой стрелки показывающий направление поворота пары. При этом момент пары сил может быть приложен к любой точке тела.
Система сходяихся сил
Система сил линии действия которых пересекаються в одной точке называються сходящимися.
Согласно аксиоме 3 (присоеденения) перенесем по линии их дествия в точку О
Таким образом любую систему сил, приложенных в разных точках тела можно заменить эквивалентной системо сходящихся сил, сходщихся в одной точка.
Равнодествующая R, систеы сходящихся сил, будет определяться по правилу многоугольника. Последовательность откладывания сил при построении многоугольника произвольная. При этом может изменятьс форма многоугольника, но направление и значение равнодействующих (замыкающего звена) останеться постояйнной.
Следовательное равноддействующая какого угодно чесла сил, приложенных в одной точке, будет приложенна в той же точке, и равна геометрической сумме этих сил
Сложение сходяися сил по правилу многоугольника можно рассматривать так же, как результат последовательного сложения. Данных сил по правилу треугольника.
При решении задач можно использовать анатлитический метод. То есть рассматривать проэкции сил.
Прэкция замыкающего звена многоугольника на какую либо ось равна алгеобраической сумме проэкций сил на эти же оси.
Силовой многоугольник.
Rx=F1x+F2x+F3x+….Fnx=ΣFix
Ry=F1y+F2y+F3y+….Fny=ΣFix
определяет велечину равнодествующей R
Условия системы сходящихся сил.
Система находистья в равновесии если силовой многоугольник, построенный на соотвствующих силах, этой системы.
Мы расматриваем наш силово многоугольник замкнутым.
В таком случае R=0
В плоскости
Rx=0, Ry=0
В пространстве
Rx=0 Ry=0 Rz=0
Условия равновесия системы сходящихс сил на плоскости
ΣХi=0
ΣYi=0
Сумма проэкций всех сил, действющих на тело на оси х и у равны нулю.
В пространственой системе равны на оси x y и z.
Если сил больше чем уравнени (ольше трех тогда урованине статисечкие неопредленимая).
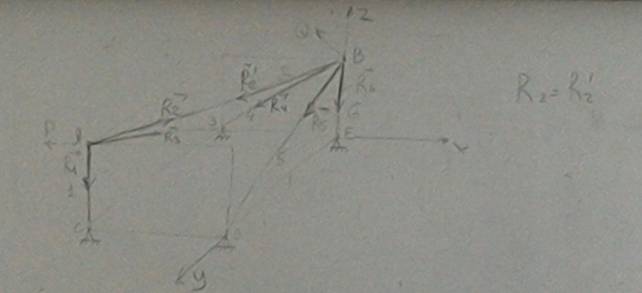
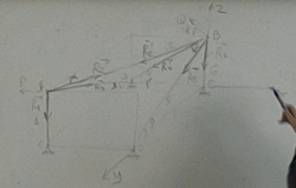
Тогда применяеться метод вырезания узлов.
Разбивает на два узла: Уел А и узел В.
Дано Q, P
Вводим углы.
Узел А
Узел В
Основные типы идеальных связей.
Идеальной называется связь в которой нет терния.
1. Гладкая поверхность.
Гладкая поверхность препятствует перемещению тела в направлении нормали.
 Поэтому реакция всегда направлена. Вегда по перпендикуляру в сторону противоположную той, куда поверхность препяствует перемещению тела.
Поэтому реакция всегда направлена. Вегда по перпендикуляру в сторону противоположную той, куда поверхность препяствует перемещению тела.

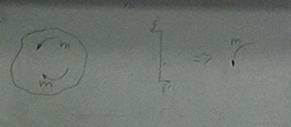
2Ребро
Реакци ребра направлена по нормали к поверхности тела и особеностью этой связи. И особеностью вляеться то что при изменении положение палки менеться направление реакции….

3.Гибкая связь.
Реакция всегда направлена вдоль гибко свяи, но ее направление определяеться в зависимости от тела, равновесие оторого мы рассматриваем.
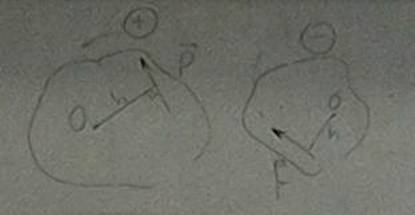
4Неподвижные опоры.
 сама точка о не может перемещаься ни в каком направлении перпендикулярном оси вращения. Линия действия реакции проходит через ось шарнира. Реакция р может иметь любое направление в плоскости перпеникулярной оси при решении задач целесообрано расматривать проекции реакций на оси координат
сама точка о не может перемещаься ни в каком направлении перпендикулярном оси вращения. Линия действия реакции проходит через ось шарнира. Реакция р может иметь любое направление в плоскости перпеникулярной оси при решении задач целесообрано расматривать проекции реакций на оси координат
5Подвижая опора.
Под шарнирную опор подведены катки. Чае всего такие конструкции применяються в мостовых механизмах. Реакция R всегда направлена перпендикулярно плоскости, на которую опираються ккатки.
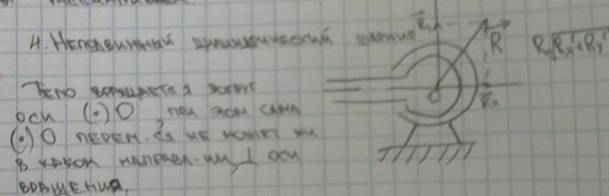
6Неподвижный сферический шарнир.
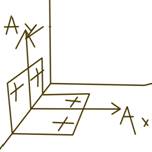
Реакция Ra проходит чере центр шарнира и может иметь любое направлениее в пространстве. При решении адач целесообрано расматривать проекции ранрс нс три оси координат.
Петля
подпятник.
Стержень
 Весом стержня можно принеберчь, если рассматривать равновесие самого стержня, то нообходимо учитывать действи сил приложенных к его концам со стороны тела и со стороны опоры. Реакция стержня на тело и тела на стержень равны и противоположнонаправленны. При ререшении задач выбираетьс объект равновесия и реакци связи направляеться по пряямой, проходяей чере стржень..
Весом стержня можно принеберчь, если рассматривать равновесие самого стержня, то нообходимо учитывать действи сил приложенных к его концам со стороны тела и со стороны опоры. Реакция стержня на тело и тела на стержень равны и противоположнонаправленны. При ререшении задач выбираетьс объект равновесия и реакци связи направляеться по пряямой, проходяей чере стржень..
Заделка. К пример гвоздь абиты в стену.
Принцип освобождамости от связей.
Любое несвободное тело при решении задач должно быть заменено на свободное тело При этом связи, наложенные на силу, отбрасываються и заменяються их реакциями.
Рассмотрим балку АБ нагрженную активными силами P и F.
В точке А
при переходе к расчету необходмо перети к расчетно схеме.
14.10.2017








