

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Одной из главных целей синтеза автоматической системы является обеспечение требуемой точности в установившихся и переходных режимах. Точность систем в установившихся режимах можно улучшить, увеличивая порядок астатизма и коэффициент разомкнутого контура. Но при этом, как правило, уменьшается запас устойчивости, увеличивается колебательность и, как следствие, ухудшается точность системы в переходных процессах. Эффективным средством устранения противоречия между условиями точности в установившихся и переходных режимах служит компенсация внешних воздействий путём осуществления инвариантности (независимости одной физической величины от другой).
Инвариантность в автоматических системах достигается при помощи управления по возмущению: управляющее воздействие формируется в зависимости от изменений возмущающего воздействия.
Рассмотрим схему комбинированной системы (рис.1). Уравнение такой системы имеет вид:

 +
+  , (5.1)
, (5.1)
где:
 -передаточная функция системы по задающему воздействию;
-передаточная функция системы по задающему воздействию;
 - передаточная функция системы по возмущению.
- передаточная функция системы по возмущению.
Управляемая величина не зависит от возмущения, если передаточная функция по возмущению равна нулю. А это возможно, если равен нулю её числитель. Отсюда условие инвариантности стабилизируемой величины по отношению к возмущению:
 .
.
Находим передаточную функцию компенсирующего устройства:
 . (5.2)
. (5.2)
Подставляя в формулу (5.2) найденные ранее передаточные функции объекта по различным каналам и регулятора, получаем передаточную функцию компенсирующего устройства:

где запаздывание можно разложить следующим образом:

 (5.3)
(5.3)
Для удобства практической реализации компенсатора используется типовой физически реализуемый компенсатор, передаточная функция которого имеет вид:
|
|
 (5.4)
(5.4)
Вопрос при этом сводится к поиску таких Тк, при которых выражение (5.4) максимально приближается к (5.3). Делается это по следующим формулам:
 ,
,
По формулам разложения дробно-рациональных функций:

Полученная передаточная функция физически реализуемого компенсатора имеет вид:
Определение показателей качества в системе по возмущающему воздействию с компенсатором и без него
Для построения переходной характеристики по возмущающему воздействию запишем передаточную функцию по возмущению:
С компенсатором


Расчет и построение данного переходного процесса выполняется в программе «СС», он показан на рис.10.
Определяем показатели качества системы:
1. Статическая ошибка:
 .
.
2. Время регулирования:

3. Перерегулирование:

Качество управления считается удовлетворительным, если перерегулирование не превышает 30-40%.
4. Колебательность:

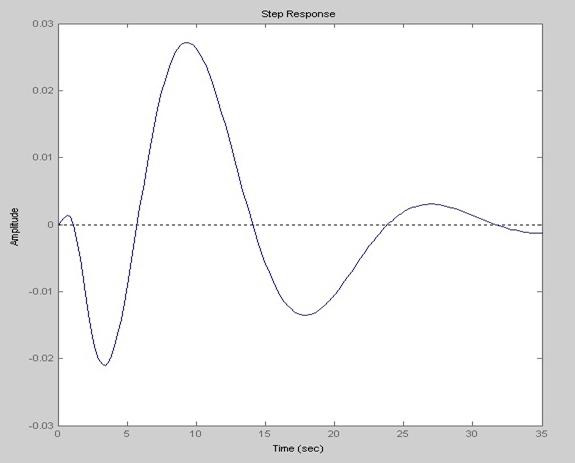
Рис. 10, Переходный процесс САУ по возмущающему воздействию с компенсатором
Без компенсатора
Расчет и построение данного переходного процесса выполняется в программе «СС», он показан на рис.11.
Определяем показатели качества системы:
1. Статическая ошибка:
.
2. Время регулирования:

3. Перерегулирование:

Качество управления считается удовлетворительным, если перерегулирование не превышает 30-40%.
4. Колебательность:

5. Степень затухания:

Интенсивность затухания колебаний в системе считается удовлетворительной, если  .
.
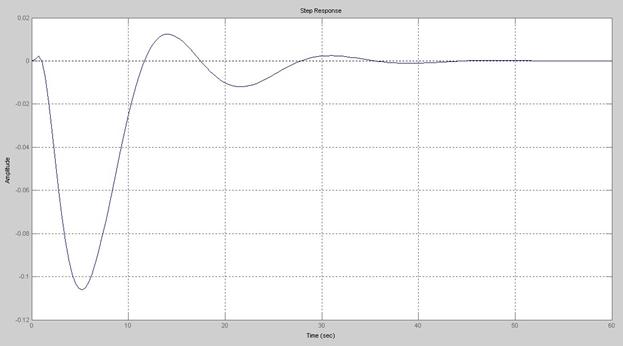
Рис. 11, Переходный процесс САУ по возмущающему воздействию без компенсатора
Вывод: Оценив переходные процессы по возмущающему воздействию, можно сделать вывод, что построенная система автоматического управления является работоспособной и имеет показатели качества на хорошем уровне.
Рис.12 Структурная схема комбинированной системы управления
|
|
|
|
|

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!