История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Лабораторная работа №6.
Линейная фильтрация полей
Для решения одной из основных задач обработки геологических полей (собственно геологических, геофизических или геохимических полей) на начальной стадии их анализа наиболее широко применяются различные приемы фильтрации.
Геофизическое поле представляет собой в общем случае сумму сигнала a(x) и помехи v(x) F(x)= a(x)+v(x)
| Определение 1.8 | Под сигналом понимается закономерная часть случайного поля, которая содержит полезную информацию о геологическом объекте. |
| Определение 1.9 | Помеха - случайная часть поля представляет собой возмущения, препятствующие выделению полезной информации. |
Помеха может быть геологического происхождения (связанная с неоднородностями изучаемых геологических тел, влиянием перекрывающих насосов, вторичных геологических процессов и др.) и технического происхождения, связанная с погрешностями измерений, вариациями поля и т.д.
Простейшим способом фильтрации является усреднение по различным реализациям случайной функции, т.е. нахождение ее математического ожидания. Рис. 2.1.
 (7.2.1)
(7.2.1)
где: k - номер реализации, N- число реализации случайного поля.
 |
нескольких контрольных маршрутов.
Вычисление оценки математического ожидания стационарной случайной функции проводится по формуле:
 (7.2.2)
(7.2.2)
где: n - число пикетов на профиле.
Это можно рассматривать, как своего рода сглаживание, только по одной реализации.
Естественно возникает желание распространить эту идею и на нестационарные случайные функции.
|
|
Так можно сделать, если случайная функция достаточно протяженна и подсчет среднего осуществляется на интервале, в пределах которого случайную функцию можно приближенно считать стационарной.
За сглаженное значение функции в этом случае принимается среднее значение случайной функции внутри интервала L с центром в точке xj (Среднее значение  относится к середине интервала)
относится к середине интервала)
Перемещая интервал вдоль оси Х, каждый раз подсчитывая среднее значение внутри интервала, получим отфильтрованное поле. Рассмотренный метод носит название скользящего среднего или скользящего окна.
В этом случае фильтрация случайной функции методом скользящего окна по одной ее реализации осуществляется по формуле
 (7.2.3)
(7.2.3)
где: L- ширина окна (нечетное число пикетов),
j- номер центрального пикета в окне,
i- номер пикета в пределах окна.
Чем больше L, тем лучше сглаживание, тем более плавной получится сглаженная функция, которой мы фактически оцениваем истинное математическое ожидание. Однако при слишком большом L сгладится и само математическое ожидание случайной функции. Следовательно, возникает задача определения длины окна.
Рис. 2.1
При решении этой задачи обычно исходят из характера корреляционных свойств случайной функции, о которых судят по величине радиуса корреляции R. Длина фильтра не должна превышать 2R.
Проведем фильтрацию случайной функции приведенной в таблице
Рис. 2.2(а).
| x | ||||||||||
| F(x) | ||||||||||
| x | ||||||||||
| F(x) |


|
|
Рис 2.2(а)
Прежде всего, вычислим автокорреляционную функцию.
Рис.2.2(б).
 | |||
| |||
Рис. 2.2(б)
Анализ автокорреляционной функции показывает, что в реализации случайной функции представлены два вида колебаний:
|
|
1) c полупериодом, равным 2R=9 пикетам;
2) коротко - периодические колебания, отражающие ошибки
наблюдений.
Эти коротко - периодические колебания, которые в данном случае являются помехой, необходимо отфильтровать. Поэтому ширину окна выбираем (L=7)<9 (нечетное число пикетов).
Отфильтрованное поле приведено на рис. 2.2(в).
|

 |



|
Рис.2.2(в)
Рассмотренный выше прием линейной фильтрации скользящее среднее,
Рис. 3.5.1
Лабораторная работа №7.
Построение матеметической модели продуктивного пласта на основе Байесовской стратегии
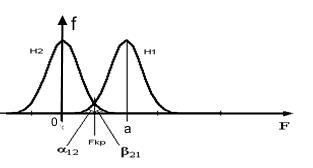
Пусть в рассматриваемом районе встречены две породы (продуктивный пласт и вмещающая порода) и, в соответствии с этим будем проверять справедливость одной из двух гипотез:
H1 – гипотеза о том, что в данной точке пространства находится продуктивный пласт;
H2 –гипотеза о том, что в данной точке пространства находится вмещающая порода.
Пусть априорные вероятности гипотез:
Р(Н1)=0.5; Р(Н2)=0.5;  .
.
Проведен каротаж опорной скважины, в результате этого получено поле F.
Наблюдаемое поле есть адитивная смесь полезного сигнала и помехи.
F=a (x) + v (x),
Где: a средний уровень поля для продуктивного пласта.
Предположим, что помеха распределена по нормальному закону с математическим ожиданием равным нулю и среднеквадратическим отклонением σ:
Запишем дифференциальные функции распределения для каждой гипотезы
 (3.5.1)
(3.5.1)
 (3.5.2)
(3.5.2)
(3.5.3)
Будем проводить анализ данных каротажа в окне длиной L, тогда дифференциальные функции в окне примут вид:
 ; (3.5.4)
; (3.5.4)
 ; (3.5.5)
; (3.5.5)
j - середина окна.
i- текущая точка внутри окна.
Кривые распределения дифференциальных функций будут иметь следующий вид:
Случайные функции и их характеристики
Геологические модели исследуемого геологического пространства создаются на основе анализа комплексной геологической информации. Среди этой информации важное место занимают геологические, геохимические и геофизические поля, полученные в результате геологических, геохимических и геофизических съемок различного уровня, каротажа скважин и др.
| Определение 1.1 | Случайной называют функцию, которая в результате испытания принимает тот или иной конкретный вид, заранее неизвестно какой именно. |
Случайные функции - это упорядоченные по времени или пространству случайные величины. Примерами случайных функций в геологической практике, как уже отмечалось, являются: результаты опробования вдоль горных выработок, измерения геофизических или геохимических полей, измерения вариаций магнитного поля в течение дня, данные каротажа скважин и документации скважин и др.
|
|
| Определение 1.2 | Случайная функция, аргументом которой является время, называется случайным процессом F(t). |
| Определение 1.3 | Случайная функция, аргументом которой является координаты пространства, называется случайным полем F(x). |
Каждый конкретный вид, который принимает случайная функция в результате испытания, называется ее реализацией.
При проведении серии испытаний получают семейство реализаций случайной функции.
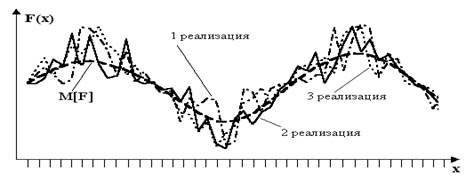 |
Примером такого семейства являются контрольные измерения геофизического поля по одному и тому же профилю.
| Определение 1.4 | Совокупность значений случайной функции для любого фиксированного значения аргумента xj называется сечением случайной функции и является обычной случайной величиной F(xj). |
Для этой случайной величины можно вычислить математическое ожидание M[F(xj)], дисперсию D[F(xj)] и другие характеристики, построить функцию плотности распределения fFj и т.д. Если вычислить математическое ожидание и дисперсию для каждого значения аргумента х случайной функции, получим математическое ожидание M[F] и дисперсию D[F] случайной функции.
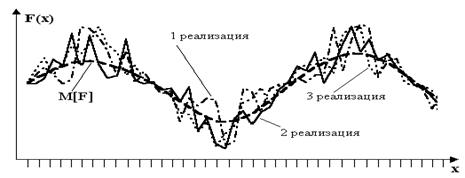
Математическое ожидание случайной функции характеризует некоторую среднюю функцию, вокруг которой колеблются все ее реализации.
 (7.1)
(7.1)
Дисперсия случайной функции характеризует разброс реализаций относительно математического ожидания случайной функции.
 (7.2)
(7.2)
Здесь:  Fk(xi) - реализация случайной функции
Fk(xi) - реализация случайной функции
K - количество реализаций.
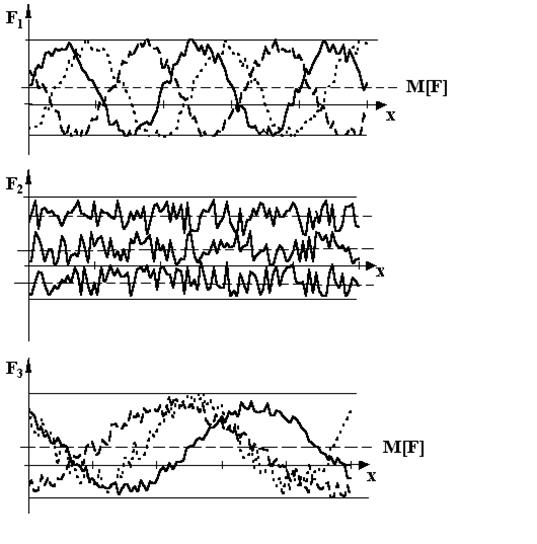
| Определение 1.5 | Случайная функция называется стационарной, если ее математическое ожидание, дисперсия и автокорреляционная функция не изменяются с изменением аргумента. |
| Определение 1.6 | Стационарные функции, характеристики которых полученные по одной реализации, являются представительными для всех реализаций и для всей функции в целом, называются эргодическими. |
 |
|
|
На рис. 7.2. приведены стационарные случайные функции, кроме того F1 и F3 являются также и эргодическими.
Для эргодических случайных функций оценки статистических характеристик могут вычисляться по более простым формулам по одной реализации.
 (7.3)
(7.3)
 (7.4)
(7.4)
где: n- число значений случайной функции в одной реализации.
Математическое ожидание определяет среднюю линию, а дисперсия - полосу, в которой осуществляются реализации случайной функции. Однако, поведение функции внутри полосы бывает совершенно различным.
Так, например, F1 и F2 имеют примерно одинаковые M[F] и D[F], однако, колебания функций различны.
| Определение 1.7 | Характеристикой изменчивости какой-либо реализации функции вдоль оси абсцисс может служить величина зависимости между соседними значениями функции. Эта зависимость оценивается автокорреляционной функцией (АКФ). |
Для функций с дискретным аргументом (т.е. когда измерения проведены по регулярной сети). Автокорреляционная функция вычисляется по формуле:
AKФF(θ) = rF( (7.5)
(7.5)
Где  (7.6)
(7.6)
Автоковариационная функция:
здесь:  - величина сдвига реализации случайной функции, равная 1,2,..m пикетам.
- величина сдвига реализации случайной функции, равная 1,2,..m пикетам.
Рассмотрим пример вычисления автокорреляционной функции.
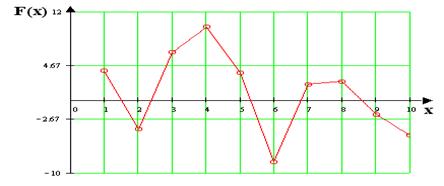 |
Рис. 7.3(а)
Вычислим математическое ожидание M[F] и вычтем его из значений функции в результате получим:
| xi | ||||||||||
| Fxi-М[F] | -4 | 6,5 | 3,7 | -8,5 | 2,1 | 2,5 | -2,0 | -4,8 |
Требуется построить автокорреляционную функцию.
1. Пусть =0
| xi | ||||||||||
| Fxi-М[F] | -4 | 6,5 | 3,7 | -8,5 | 2,1 | 2,5 | -2,0 | -4,8 | ||
| Fxi-М[F] | -4 | 6,5 | 3,7 | -8,5 | 2,1 | 2,5 | -2,0 | -4,8 |
KF(0)= 
KF(0) = 30,2;  rF(0) =1
rF(0) =1
Значение автоковариационной функции для =0 соответствует
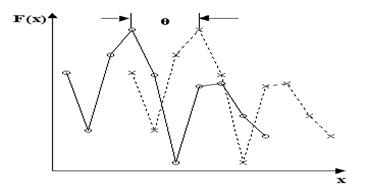 |
Рис. 7.3(б)
2. Пусть =1 KF1(1)= 
| xi | ||||||||||
| Fxi-М[F] | -4 | 6,5 | 3,7 | 8,5 | 2,1 | 2,5 | -2,0 | |||
| Fxi+1-М[F] | -4 | 6,5 | 3,7 | 8,5 | 2,1 | 2,5 | -2,0 | -4,8 |
KF1(1)= 
KF(1)=6,6  rF(1)=0,219
rF(1)=0,219
3. Пусть =2 KF2(2)= 
| x1 | |||||||||||
| Fxi-М[F] | -4 | 6,5 | 3,7 | 8,5 | 2,1 | 2,5 | -2.0 | ||||
| Fxi+2-М[F] | -4 | 6,5 | 3,7 | -8,5 | 2,1 | 2,5 | -2,0 | -4,8 |
KF(2)=-8,6 rF(2)= -0,285
4. Сдвигая функцию в дальнейшем на =3,4,5,...m (Рис. 10.3(б)) получим последующие значения функций.
KF(3)=-1,8 rF(3)=-0,06
KF(4)=10,0 rF(4)=0,33
KF(5)=-1,2 rF(5)=0,04
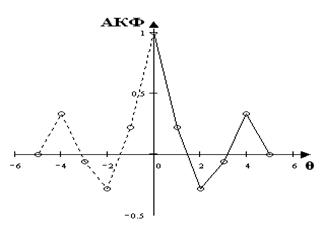 |
Рис. 7.3(в)
Автокорреляционная функция симметрична относительно вертикальной оси. При =0, rF(0)=1.
Для различных  автокорреляционная функция представляет собой коэффициенты корреляции двух случайных величин F(xi) и F(
автокорреляционная функция представляет собой коэффициенты корреляции двух случайных величин F(xi) и F( ).
).
|
|
Числовой характеристикой зависимости значений случайной функции вдоль профиля является радиус корреляции R, т.е. такое среднее расстояние, на котором сохраняется положительная корреляционная связь в структуре случайной функции.
В простейшем случае радиус корреляции (R) представляет собой расстояние от начала координат до пересечения rF с осью абсцисс. Удвоенный радиус корреляции 2R характеризует средний полупериод колебаний случайной функции. Если R<1 - исследуемая функция называется некоррелируемой.
Лабораторная работа №6.
Линейная фильтрация полей
Для решения одной из основных задач обработки геологических полей (собственно геологических, геофизических или геохимических полей) на начальной стадии их анализа наиболее широко применяются различные приемы фильтрации.
Геофизическое поле представляет собой в общем случае сумму сигнала a(x) и помехи v(x) F(x)= a(x)+v(x)
| Определение 1.8 | Под сигналом понимается закономерная часть случайного поля, которая содержит полезную информацию о геологическом объекте. |
| Определение 1.9 | Помеха - случайная часть поля представляет собой возмущения, препятствующие выделению полезной информации. |
Помеха может быть геологического происхождения (связанная с неоднородностями изучаемых геологических тел, влиянием перекрывающих насосов, вторичных геологических процессов и др.) и технического происхождения, связанная с погрешностями измерений, вариациями поля и т.д.
Простейшим способом фильтрации является усреднение по различным реализациям случайной функции, т.е. нахождение ее математического ожидания. Рис. 2.1.
(7.2.1)
где: k - номер реализации, N- число реализации случайного поля.
|
нескольких контрольных маршрутов.
Вычисление оценки математического ожидания стационарной случайной функции проводится по формуле:
(7.2.2)
где: n - число пикетов на профиле.
Это можно рассматривать, как своего рода сглаживание, только по одной реализации.
Естественно возникает желание распространить эту идею и на нестационарные случайные функции.
Так можно сделать, если случайная функция достаточно протяженна и подсчет среднего осуществляется на интервале, в пределах которого случайную функцию можно приближенно считать стационарной.
За сглаженное значение функции в этом случае принимается среднее значение случайной функции внутри интервала L с центром в точке xj (Среднее значение относится к середине интервала)
Перемещая интервал вдоль оси Х, каждый раз подсчитывая среднее значение внутри интервала, получим отфильтрованное поле. Рассмотренный метод носит название скользящего среднего или скользящего окна.
В этом случае фильтрация случайной функции методом скользящего окна по одной ее реализации осуществляется по формуле
(7.2.3)
где: L- ширина окна (нечетное число пикетов),
j- номер центрального пикета в окне,
i- номер пикета в пределах окна.
Чем больше L, тем лучше сглаживание, тем более плавной получится сглаженная функция, которой мы фактически оцениваем истинное математическое ожидание. Однако при слишком большом L сгладится и само математическое ожидание случайной функции. Следовательно, возникает задача определения длины окна.
Рис. 2.1
При решении этой задачи обычно исходят из характера корреляционных свойств случайной функции, о которых судят по величине радиуса корреляции R. Длина фильтра не должна превышать 2R.
Проведем фильтрацию случайной функции приведенной в таблице
Рис. 2.2(а).
| x | ||||||||||
| F(x) | ||||||||||
| x | ||||||||||
| F(x) |
|
|
Рис 2.2(а)
Прежде всего, вычислим автокорреляционную функцию.
Рис.2.2(б).
| |||
| |||
Рис. 2.2(б)
Анализ автокорреляционной функции показывает, что в реализации случайной функции представлены два вида колебаний:
1) c полупериодом, равным 2R=9 пикетам;
2) коротко - периодические колебания, отражающие ошибки
наблюдений.
Эти коротко - периодические колебания, которые в данном случае являются помехой, необходимо отфильтровать. Поэтому ширину окна выбираем (L=7)<9 (нечетное число пикетов).
Отфильтрованное поле приведено на рис. 2.2(в).
|
|
|
Рис.2.2(в)
Рассмотренный выше прием линейной фильтрации скользящее среднее,
|
|
|

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!