Структурные схемы автоматизации в проектах автоматизации рекомендуется разрабатывать в соответствии с ГОСТ 24.302-80. Система технической документации на АСУ. Общие требования к выполнению схем (п. 2.1, 2.2, 2.6).
Графическое построение схемы должно давать наиболее наглядное представление о последовательности взаимодействия функциональных частей в изделии. На линиях взаимодействия рекомендуется стрелками (по ГОСТ 2.721-74) обозначать направления хода процессов, происходящих в изделии.
На структурной схеме отображаются в общем виде основные решения проекта по функциональной, организационной и технической структурам автоматизированной системы управления технологическими процессами (АСУ ТП) с соблюдением иерархии системы и взаимосвязей между пунктами контроля и управления, оперативным персоналом и технологическим объектом управления. Принятые при выполнении структурной схемы принципы организации оперативного управления технологическим объектом, состав и обозначения отдельных элементов структурной схемы должны сохраняться во всех проектных документах на АСУ ТП, в которых они конкретизируются и детализируются в функциональных схемах автоматизации, структурной схеме комплекса технических средств (КТС) системы, принципиальных схемах контроля и управления, а также в проектных документах, касающихся организации оперативной связи и организационного обеспечения АСУ ТП.
Исходными материалами для разработки структурных схем являются:
- задание на проектирование АСУ ТП;
- принципиальные технологические схемы основного и вспомогательного производств технологического объекта;
- задание на проектирование оперативной связи подразделений автоматизируемого технологического объекта;
- генплан и титульный список технологического объекта.
Структурная схема разрабатывается на стадиях «проект» и «рабочий проект». На стадии «рабочая документация» при двух - стадийном проектировании структурная схема разрабатывается только в случае изменений технологической части проекта или решений по АСУ ТП, принятых при утверждении проекта автоматизации.
В качестве примера на рис. 8.4 приведена структурная схема управления сернокислотным производством.
На структурной схеме показывают:
- технологические подразделения автоматизируемого объекта (отделения, участки, цехи, производства);
- пункты контроля и управления (местные щиты, операторские и диспетчерские пункты и т.п.), в том числе не входящие в состав разрабатываемого проекта, но имеющие связь с проектируемыми системами контроля и управления;
- технологический (эксплуатационный) персонал и специализированные службы, обеспечивающие оперативное управление и нормальное функционирование технологического объекта;
- основные функции и технические средства (устройства), обеспечивающие их реализацию в каждом пункте контроля и управления;
- взаимосвязь подразделений технологического объекта, пунктов контроля и управления и технологического персонала между собой и с вышестоящей системой управления (АСУ).

Рис. 8.4. Фрагмент структурной схемы управления и контроля сернокислотным производством:1-линия связи с цеховой химической лабораторией; 2 - линия связи с пунктами контроля и управления кислотным участком; 3 - линия связи с пунктом контроля и управления III и IV технологическими линиями
Функция АСУ ТП и их условные обозначения на рис. 8.4
Таблица 8.1
| Условное обозначение
| Наименование
|
|
| Контроль параметров
|
|
| Дистанционное управление технологическим оборудованием и исполнительными устройствами
|
|
| Измерительное преобразование
|
|
| Контроль и сигнализация состояния оборудования и отклонения параметров
|
|
| Стабилизирующее регулирование
|
|
| Выбор режима работы регуляторов и ручное управление задатчиками
|
|
| Ручной ввод данных
|
|
| Регистрация параметров
|
|
| Расчет технико-экономических показателей
|
|
| Учет производства и составления данных за смену
|
|
| Диагностика технологических линий (агрегатов)
|
|
| Распределение нагрузок технологических линий (агрегатов)
|
|
| Оптимизация отдельных технологических процессов
|
|
| Анализ состояния технологического процесса
|
|
| Прогнозирование основных показателей производства
|
|
| Оценка работы смены
|
|
| Контроль выполнения плановых заданий
|
|
| Контроль проведения ремонтов
|
|
| Подготовка и выдача оперативной информации в АСУП
|
|
| Получение производственных ограничений и заданий от АСУП
|
Элементы структурной схемы изображаются, как правило, в виде прямоугольников. Отдельные функциональные службы [отдел главного энергетика (ОГЭ), отдел главного механика (ОГМ), отдел технического контроля (ОТК) и т.п.] и должностные лица (директор, главный инженер, начальник цеха, начальник смены, мастер и т. п.) допускается изображать на структурной схеме в виде кружков.
Внутри прямоугольников, изображающих участки (подразделения) автоматизируемого объекта, раскрывается их производственная структура. При этом выделяются цехи, участки, технологические линии либо группы агрегатов для выполнения законченного этапа технологического процесса, которые являются существенными для раскрытия в документах проекта всех взаимосвязей между управляемой (технологическим объектом управления) и управляющей системами.
На схеме функции АСУ ТП могут указываться в виде условных обозначений, расшифровка которых дается в таблице на поле чертежа (табл.8.1).
Наименование элементов производственной структуры должны соответствовать технологической части проекта и наименованиям, используемым при выполнении других документов проекта АСУ ТП.
Взаимосвязь между пунктами контроля и управления, технологическим персоналом и объектом управления изображается на схеме сплошными линиями. Слияние и разветвление линий показываются на чертеже линиями с изломом (рис.8.4).
При наличии аналогичных технологических объектов (цехов, отделений, участков и т. д.) допускается раскрывать на схеме структуру управления только для одного объекта. Об этом на схеме даются необходимые пояснения.
Из структурной схемы на рис.8.4 следует, что система управления основными технологическими процессами сернокислотного производства четырехуровневая:
- первый уровень - местное управление агрегатами осуществляемое аппаратчиками с рабочих постов;
- второй уровень - централизованное управление несколькими агрегатами, входящими в тот или иной технологический участок, осуществляемое старшим аппаратчиком;
- третий уровень - централизованное управление несколькими участками, входящими в I и II (или III и IV) технологические линии сернокислотного производства;
- четвертый уровень - управление с диспетчерского пункта всеми технологическими линиями сернокислотного производства, осуществляемое диспетчером.
Структурные схемы выполняются, как правило, на одном листе. Таблица с условными обозначениями (табл.8.1) располагается на поле чертежа схемы над основной надписью. Таблица заполняется сверху вниз. При большом числе условных обозначений продолжение таблицы помещают слева от основной надписи с тем же порядком заполнения. Основную надпись и дополнительные графы к ней выполняют согласно ГОСТ 21.103-78.
Толщину линий на схеме выбирают в соответствии с ГОСТ 2.303-68. Рекомендуется использовать для условных изображений линии толщиной 0, 5 мм; для линий связи - 1 мм; для остальных линий - 0, 2 - 0, 3 мм.
Размеры цифр и букв для надписей выбирают в соответствии с ГОСТ 2.304-81. Пояснительный текст следует выполнять в соответствии с ГОСТ 2.316-68. Текстовую часть, помещенную на поле чертежа, располагают над основной надписью. Между текстовой и основной надписями не допускается помещать изображения, таблицы и т.п. Пункты пояснительного текста должны иметь сквозную нумерацию. Каждый пункт записывают с красной строки. Заголовок «Примечание» не пишут. В тексте и надписях не допускаются сокращения слов, за исключением общепринятых, а также установленных приложениями к ГОСТ 2.316-68 и ГОСТ 2.105-95.
Размеры всех условных изображений не регламентируются и выбираются по усмотрению исполнителя с соблюдением одинаковых размеров для однотипных изображений.
В настоящее время для технологического контроля и автоматического управления широкое применение находят агрегатированные системы средств телемеханики, комплексы технических средств локальных измерительных и управляющих систем, агрегатированные системы контроля и регулирования, электрические централизованные и др.
Агрегатированные комплексы выполняются, как правило, на элементах микроэлектронной техники, имеют развитую и гибкую систему связей между входящими в нее устройствами, а также с объектом управления и обслуживающим персоналом, обеспечивающую достаточно широкие возможности их использования в различных вариантах компоновки и режимах работы.
Персональные ЭВМ и сети ПЭВМ находят широкое применение для компоновки различных структур АСУ ТП в энергетической, химической, нефтехимической, нефтеперерабатывающей, газовой, металлургической, металлообрабатывающей, горнорудной, приборостроительной, целлюлозно-бумажной и других отраслях промышленности.
Они позволяют реализовать следующие информационно-вычислительные функции АСУ ТП:
- сбор, первичную обработку и хранение информации;
- косвенные измерения параметров процесса и состояния технологического оборудования;
- сигнализацию состояния параметров технологического процесса и оборудования;
- расчет технико-экономических и эксплуатационных показателей технологического процесса и технологического оборудования;
- подготовку информации для вышестоящих и смежных систем и уровней управления;
- регистрацию параметров технологического процесса, состояний оборудования и результатов расчета;
- контроль и регистрацию отклонений параметров процесса и состояния оборудования от заданных;
- анализ срабатывания блокировок и защит технологического оборудования;
- диагностику и прогнозирование хода технологического процесса и состояния технологического оборудования;
- оперативное отображение информации и рекомендаций ведения технологического процесса и управления технологическим оборудованием;
- выполнение процедур автоматического обмена информацией с вышестоящими и смежными системами управления.
На базе промышленных УЭВМ реализуются управляющие вычислительные комплексы (УВК), выполняющие различные функции, в том числе:
- регулирование отдельных параметров технологического процесса;
- однотактное логическое управление;
- каскадное регулирование;
- многосвязанное регулирование;
- программные и логические операции дискретного управления процессом и оборудованием;
- оптимальное управление установившимся режимом технологического процесса и работы оборудования;
- оптимальное управление переходным процессом;
- оптимальное управление технологическим объектом в целом.
В проекте автоматизации необходимо произвести выбор и компоновку агрегатированных комплексов технических средств и средств автоматизации, т.е. на базе типовых технических средств разработать структурную схему технологического контроля и управления определенными параметрами данного объекта автоматизации.
На структурной схеме агрегатированные и модульные элементы комплекса технических средств и средств автоматизации изображают в виде прямоугольников с указанием в них условных обозначений. Расшифровка этих обозначений с указанием их функций производится в таблице, помещенной на чертеже схемы. Связь между элементами схемы изображается линиями со стрелками, показывающими направление прохождения сигналов.
В качестве примера на рис.8.5 приведена упрощенная структурная схема технического обеспечения АСУ ТП доменной печи № 9 Криворожского металлургического завода, построенная с использованием средств УВК. Доменная печь имеет конвейерную систему подачи материалов на колошник. Сбор информации о работе доменной печи, конвейерной системы, шихтоподачи и других систем осуществляется датчиками уровня ДУ в шихтовых и датчиками вида материала ДВМ в промежуточных бункерах, сигнализаторами С наличия и вида материалов на конвейерах переполнения течек и промежуточных воронок, датчиками давления и перепада давления ДДПД в отдельных полостях загрузочного устройства, датчиками угла поворота ДУП лотка загрузочного устройства, датчиками температуры ДТ, датчиками расхода ДР и т. п.
Обработка и предоставление информации, стабилизация или изменение по заданной программе технологических параметров, ввод информации в УВМ и вывод рекомендаций по управлению ходом доменной печи и другие операции осуществляются с помощью технических средств централизованного контроля и управления работой доменной печи.
При разработке проектов автоматизации сложных технологических процессов с использованием агрегатированных комплексов вычислительной техники, требующих предварительного проведения научно-исследовательских экспериментальных работ в условиях действующего оборудования в период освоения проектных мощностей, следует предусматривать поэтапное выполнение монтажных работ и включение УВК в работу.
В общем случае можно рекомендовать следующее поэтапное включение УВК в работу:
1) пуск объекта с технологическим контролем и автоматическим управлением от локальных систем регулирования; в этот период уточняются динамические и статические характеристики объекта, устраняются ошибки монтажа и проекта, возможные дефекты технологического оборудования, стабилизируется технологический процесс и т. п.; отрабатываются программы и алгоритмы на УВМ без их подключения к действующему технологическому оборудованию;
2) подключение УВМ к действующему технологическому оборудованию и включение ее в режим «советчика» с выдачей эксплуатационному персоналу рекомендаций по управлению ходом доменной печи;
3) включение УВМ в режим автоматического управления объектом через системы локального регулирования.
При необходимости в проектах автоматизации приводятся структурные схемы отдельных комплексов технических средств и средств автоматизации.

Рис. 8.5. Упрощенная структурная схема АСУ ТП доменной печи № 9 Криворожского металлургического завода
ДНМ - датчики наличия материалов; ДУ - датчики уровня; ДВ - датчики массы; АШиК - анализаторы шихты и кокса; ВК - влагомер кокса; ДВМ - датчики вида материалов; ДРЛК - датчики разрыва лент конвейеров; ПВМБ - питатели для выдачи материалов из бункеров; ИМ - исполнительные механизмы; ДТ - датчики температуры; ДДПД - датчики давления или перепада давлений; ДР - датчики расхода; ДВл - датчики влажности; АДиГ - анализаторы дутья и газа; ДУП- датчики угла поворота; ТК - телекамеры; СТ - сигнальное табло; ВП - вторичные приборы; МС - мнемосхемы; КУ - ключи управления; РЗВД - ручные задатчики массы дозы; ЛСДМ - локальные системы дозирования материалов; ЛСР - локальные системы регулирования; БЦИЧ - блок цифровой индикации с частотными вводами; РДЗ - ручные дистанционные задатчики; ЦИ - цифровые индикаторы; ИПМ-индикаторы положения механизмов; ТВ - телевизоры; ЭВМ ШП - электронная вычислительная машина шихтоподачи (управляющая взвешиванием материалов и производительностью тракта ШП); ЦВУ СЦК - цифровое вычислительное устройство системы централизованного контроля (осуществляющее сбор и обработку первичной информации, расчет комплексных и удельных показателей работы печи, автоматическое заполнение отчетных документов); БЦР - блок цифровой регистрации; БЦИД- блок цифровой индикации с дискретными вводами; ЭВМ УХДП - электронная вычислительная машина, управляющая тепловым состоянием и ходом печи; ИТ - информационные табло; I - первый этап внедрения (пусковой комплекс); II и III-соответственно второй и третий этапы внедрения.
18 Расчётные методы определения параметров настройки контроллеров в ЛСУ
19 Моделирование ЛСУ
Моделирование, в общем смысле – это представление какого-либо явления (процесса) некоторым описанием.
Описание может быть словесным, в виде моделей:
Физическое моделирование - это исследование объектов на физических моделях, представляющих собой некоторые объекты, сохраняющие физическую природу исходного объекта, либо описываемые математическими уравнениями, аналогичными уравнениям. описывающим исходный объект. Примером первого типа моделирования является исследование аэродинамических свойств самолета или автомобиля на макетах, примером второго типа моделирование маятника с помощью RLC – цепочки (колебательного звена).
Математическое моделирование - ММ – запись на языке математики законов, управляющих протеканием исследуемого процесса или описывающих функционирование изучаемого объекта. ММ представляет собой компромисс между бесконечной сложностью изучаемого объекта или явления и желаемой простотой его описания.
ММ должна быть достаточно полной для того. чтобы можно было изучать свойства объекта и в то же время простой для того. чтобы ее анализ существующими в математике и вычислительной технике средствами был возможен.
Имитационное моделирование основано на воспроизведении с помощью ЭВМ развернутого во времени процесса функционирования системы с учетом взаимодействия с внешней средой. Основой всякой имитационной модели (ИМ) является: разработка модели исследуемой системы, выбор информативных характеристик объекта, построение модели воздействия внешней среды на систему, выбор способа исследования имитационной модели. Условно имитационную модель можно представить в виде действующих, программно (или аппаратно) реализованных блоков. Блок имитации внешних воздействий (БИВВ) формирует реализации случайных или детерминированных процессов, имитирующих воздействия внешней среды на объект. Блок обработки результатов (БОР) предназначен для получения информативных характеристик исследуемого объекта. Необходимая для этого информация поступает из блока математической модели объекта (БМО). Блок управления (БУИМ) реализует способ исследования имитационной модели, основное его назначение – автоматизация процесса проведения ИЭ.

Целью имитационного моделирования является конструирование ИМ объекта и проведение ИЭ над ней для изучения закона функционирования и поведения с учетом заданных ограничений и целевых функций в условиях иммитации и взаимодействия с внешней средой. К достоинствам метода имитационного моделирования могут быть отнесены: 1. проведение ИЭ над ММ системы, для которой натурный эксперимент не осуществим по этическим соображениям или эксперимент связан с опасностью для жизни, или он дорог, или из-за того, что эксперимент нельзя провести с прошлым; 2. решение задач, аналитические методы для которых неприменимы, например, в случае непрерывно- дискретных факторов, случайных воздействий, нелинейных характеристик элементов системы и т.п.; 3.возможность анализа общесистемных ситуаций и принятия решения с помощью ЭВМ, в том числе для таких сложных систем, выбор критерия сравнения стратегий поведения которых на уровне проектирования не осуществим; 4.сокращение сроков и поиск проектных решений, которые являются оптимальными по некоторым критериям оценка эффективности; 5.проведение анализа вариантов структуры больших систем, различных алгоритмов управления изучения влияния изменений параметров системы на ее характеристики и т.д. Задачей имитационного моделирования является получение траектории движения рассматриваемой системы в n – мерном пространстве (Z1, Z2, … Zn), а также вычисление некоторых показателей, зависящих от выходных сигналов системы и характеризующих ее свойства. Основные методы имитационного моделирования:Аналитический метод применяется для имитации процессов в основном для малых и простых систем, где отсутствует фактор случайности. Метод статистического моделирования первоначально развивался как метод статистических испытаний. Это численный метод, состоящий в получении оценок вероятностных характеристик, совпадающих с решением аналитических задач (например, с решением уравнений и вычислением определенного интеграла). Комбинированный метод (аналитико-статистический) позволяет объединить достоинства аналитического и статистического методов моделирования. Он применяется в случае разработки модели, состоящей из различных модулей, представляющих набор как статистических так и аналитических моделей, которые взаимодействуют как единое целое. Причем в набор модулей могут входить не только модули соответствующие динамическим моделям, но и модули соответствующие статическим математическим моделям.
20 Оценка качества функционирования ЛСУ
Автоматические системы управления должны быть не только устойчивыми, но и обеспечивать качество процесса управления. Основные наиболее существенные требования к качеству управления, которые позволяют оценить работу почти всех систем управления, называют показателями процесса управления. Они характеризуют поведение системы в переходном процессе. Показателями качества будет время регулирования, перерегулирование, колебательность процесса, установившаяся ошибка, характер затухания переходного процесса, запас устойчивости.
Качество процессов регулирования обычно оценивают по переходной функции, которая представляет собой реакцию системы на внешнее воздействие типа единичного скачка. Для следящих систем и программного регулирования переходную функцию рассматривают по отношению к задающему воздействию, а для систем стабилизации – по отношению к возмущению.
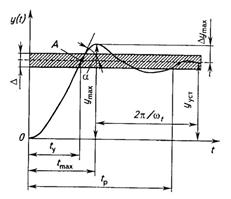
Рисунок 1. Определение показателей качества регулирования по переходной характеристике.
На рис. 1 изображена переходная функция по которой можно определить основные показатели качества переходного процесса: время регулирования, перерегулирование и др.
Время регулирования определяет длительность переходного процесса. Теоретически переходной процесс длится бесконечно долго, однако практически его считают законченным, как только отклонение регулируемой величины от нового ее установившегося значения не будет превышать допустимых пределов.
Временем регулирования называют минимальное время, по истечении которого, начиная с момента начала действия входного сигнала, выходная переменная отклоняется от установившегося значения на величину, не превышающую некоторую заданную постоянную величину 0,5.
Время регулирования характеризует быстродействие системы.
Быстродействие может характеризоваться и временем достижения переходной функцией нового установившегося значения, и временем достижения максимального значения.
Перерегулированием называется максимальное отклонение управляемой величины от заданного значения и выраженной в процентах.
Время регулирования и перерегулирования взаимосвязаны. Так, перерегулирование зависит от скорости изменения регулируемой величины, которая графически представляет собой тангенс угла наклона α (альфа) касательной в точке А к кривой (рисунок 1).
Чем больше эта скорость, тем больше перерегулирование. Поэтому для его уменьшения необходимо уменьшить скорость, с которой система подходит к новому установившемуся состоянию. Но это приведет к увеличению времени регулирования. Если система подходит к установившемуся состоянию с нулевой скоростью, то перерегулирования вообще не будет, но время регулирования значительно увеличится (рисунок 2).
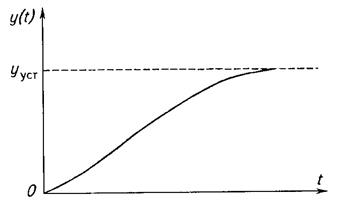
Рисунок 2. Переходная характеристика системы автоматического регулирования без перерегулирования.
Значения времени регулирования и перерегулирования часто задают в качестве исходных данных для синтеза корректирующих устройств, поскольку правильным выбором и настройкой последних обеспечивается подавление нежелательных колебаний регулируемой величины в переходном процессе. Для некоторых систем перерегулирование вообще недопустимо, например для систем автоматического регулирования физических величин в процессах, связанных с приготовлением продуктов. Необходимо так же иметь в виду, что стремление уменьшить время регулирования приводит к увеличению мощности исполнительного устройства.
Колебательность процесса характеризуется числом колебаний управляемой величины за время регулирования.
Количественно колебательность оценивается по логарифмическому декременту затухания, который представляет собой натуральный логарифм отношения двух последующих амплитуд отклонений управляемой величины одного направления.
Чем больше логарифмический декремент затухания, тем быстрее происходит затухание переходного процесса.
Установившаяся ошибка показывает точность управления в установившемся режиме. Она ровняется разности между заданным значением управляемой величины и ее установившимся значением при нормальной нагрузке.
Характер затухания переходного процесса позволяет классифицировать переходные процессы в системах управления и выделить среди их многообразия четыре основных вида (рисунок 3): колебательный процесс (кривая 1) – ему присуще несколько значений перерегулирования; малоколебательный процесс (кривая 2) – процесс с одним перерегулированием; монотонный процесс (кривая 4), при котором скорость изменения управляемой величины не изменяет знака в течение всего времени регулирования; апериодический процесс (кривая 3) – процесс, когда управляемая величина меньше ее установившегося значения с точностью до зоны нечувствительности регулятора при всех значениях времени регулирования.

Рисунок 3. Основные виды характеристик переходных процессов автоматических систем регулирования при типовом единичном воздействии.
Запас устойчивости – это физическая сущность и методы определения этого показателя качества управления.
Показатели, которые характеризуют качество работы системы в переходном режиме, делят на прямые и косвенные.
Прямые показатели – это числовые оценки качества, получаемые непосредственно по переходной характеристике. Для получения прямых показателей качества необходимо иметь кривую переходного процесса, которую можно построить по структурной схеме или дифференциальному уравнению систем автоматического регулирования, используя аналоговые вычислительные машины или компьютеры.
Косвенные оценки качества переходного процесса позволяют определить некоторые особенности переходного процесса и установить влияние параметров системы на качество переходных процессов. К косвенным показателям качества относятся корневые, частотные и интегральные оценки.
Рассмотрим корневые оценки качества. Геометрически степень устойчивости можно определить как расстояние на плоскости от мнимой оси до ближайшего к ней корня или ближайшей пары комплексных корней (рисунок 4).
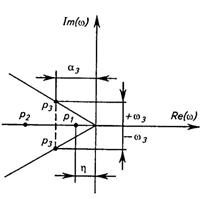
Рисунок 4. Корневые оценки качества систем автоматического регулирования.
Понятие степени устойчивости используют для синтеза систем автоматического регулирования.
Рассмотрим частотные оценки качества. При гармонических воздействиях качество систем автоматического регулирования принято оценивать по частотным характеристикам. Для этого используют следующие величины: показатель колебательности и частоту среза. Показатель колебательности – это отношение максимального значения амплитудно-частотной характеристики замкнутой системы к ее значению при частоте равной нулю. Частота среза – это частота при которой амплитудно-частотная характеристика равна единице. Косвенно она характеризует длительность переходного процесса.
Рассмотрим интегральные оценки качества. По кривой переходного процесса можно оценить качество процесса регулирования в данной системе. Косвенно оценить качество регулирования можно по площади между кривой переходного процесса и линией установившегося режима. В данном случае критерием качества будет определенный интеграл по времени от функции, характеризующей разницу между действительным и заданным значениями регулируемой величины.
21 Принципы построения ЛСУ температурой в ТОУ
22 Принципы построения ЛСУ давлением в ТОУ
23 Принципы построения ЛСУ расходом в ТОУ
24 Принципы построения ЛСУ уровнем в ТОУ
25 Системы автоматической защиты и блокировки








