Общие положения методики получения математических моделей.
Положения блочно-иерархического подхода к проектированию сложных систем проявляются прежде всего при построении иерархического ряда математических моделей для создаваемых объектов.
Накаждом иерархическом уровне проектирования различают понятия математических моделей системы (ММС) и элемента (ММЭ) системы.
Как правило, элементная база любого класса систем состоит из небольшого числа типов элементов, для которых заранее разрабатываются ММЭ и заносятся в соответствующую библиотеку моделей. В то же время число систем, создаваемых на заданной элементной базе, может быть очень большим, и для каждого исследуемого варианта каждой проектируемой системы нужно иметь свою ММС. Поэтому задачи получения ММЭ и ММС различные.
Примерами ММЭ и ММС могут служить библиотеки типовых блоков МВТУ и МАТЛАБ.
Библиотека ММЭ для определенной предметной области создается однократно и далее пополняется по мере появления элементов нового типа или потребностей в улучшении имеющихся ММЭ. Для получения ММ новых типов элементов нет строгих формальных алгоритмов, эти модели создаются опытными специалистами на основе теоретического или экспериментального изучения свойств элементов.
Общая методика получения ММЭ включает в себя выполнение следующих процедур:
1. Определение свойств объекта (элемента), которые должна отражать модель. Включение в перечень таких отражаемых свойств, оценка которых не требуется для принятия проектных решений на определенном этапе проектирования, приводит к усложнению модели и нерациональному расходованию ресурсов САПР.
2. Сбор исходной информации о выбранных свойствах объекта. Используются знания о закономерностях функционирования объекта, справочные данные, планируются и реализуются необходимые экспериментальные исследования и т. д.
3. Получение структуры модели, т. е. математических выражений и уравнений, описывающих в общем виде отношения между фазовыми переменными и параметрами объекта. Иногда вместо системы уравнений модель удобно представлять на некотором формальном графическом языке (например, языке графов или эквивалентных схем), допускающем однозначный перевод на язык математических формул.
4. Расчет числовых значений параметров ММЭ для заданного экземпляра или группы экземпляров объектов. Известны значения выходных параметров yjист объекта и необходимо выбрать такие значения внутренних параметров xi модели, при которых оценки выходных параметров уjm, полученные на основе моделирования, были максимально приближены к значениям yjист. Другими словами, задача расчета xi формулируется как экстремальная задача:
 (1)
(1)
где εм—норма вектора относительных погрешностей

XD—заданная область возможных значений внутренних параметров.
5. Оценка точности и адекватности модели. Обычно точность определяется в некоторой тестовой ситуации, характеризуемой заданными значениями внешних переменных qk. и известными значениями yjист, при этом необходимо, чтобы эта тестовая ситуация не использовалась при решении задачи (1). Однако оценки точности, полученные в одной или нескольких точках пространства QΠ внешних переменных Q= (q1, q2,… qi), не дают полных сведений о возможностях применения модели в других точках этого пространства. Эти введения можно получить при построении области адекватности (ОА) модели.
Область адекватности — это область в пространстве QΠ, в пределах которой погрешность εм модели не превышает заданное значение. Определение и представление ОА как области с нелинейными границами в многомерном пространстве требует значительных вычислительных ресурсов. Поэтому вместо истинной ОА используют область адекватности, аппроксимированную (ОАА). ОАА можно взять в виде гиперпараллелепипеда, вписанного в ОА и имеющего ребра, параллельные координатным осям пространства внешних переменных. В двухмерном пространстве это квадрат, причем ОАА можно тогда описать в виде совокупности неравенств. Построение ОАА осуществляется с помощью методов оптимизации допусков, и несмотря на переход от ОА к ОАА, оно довольно трудоемкое. Поэтому практически его целесообразно выполнять только для математических моделей унифицированных элементов, на протяжении длительного времени входящих в элементную базу проектируемой аппаратуры.
Требования к точности моделирования зависят от ряда факторов: характера проектной процедуры, близости к завершающим итерациям и т. п. Использование во всех случаях одних и тех же ММЭ, которые при этом должны быть высокоточными, следовательно, сложными, требующими больших затрат вычислительных ресурсов, нецелесообразно. Поэтому в ПМК для определенных типов элементов желательно иметь несколько ММ, различающихся размерами ОА и экономичностью. Математическая модель элемента, наиболее точно и всесторонне отражающая свойства моделируемого объекта, называется полной моделью, а ММЭ, менее универсальные и точные, но более экономичные по сравнению с полной моделью, называются макромоделями.
Исполнительные устройства
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от управляющего устройства командным сигналом, называется исполнительным устройством. Выходным параметром исполнительного устройства (ИУ) является расход вещества или энергии, поступающих в объект управления или выходящих из него, а входным — командный сигнал управляющего устройства.
Исполнительное устройство содержит, как правило, несколько функциональных блоков: усилитель мощности; исполнительный механизм; регулирующий орган; датчик положения; блок обратной связи; блок сигнализации крайних положений; блок ручного управления.
В зависимости от конкретных условий структура и конструкция ИУ могут существенно различаться. Например, если управляющим воздействием является изменение потока электроэнергии (в аппаратах с электрообогревом, в электролитических ваннах, в электролизерах), то необходимость в исполнительном механизме и регулирующем органе отпадает, а роль исполнительного устройства играет усилитель. В ряде устройств регулирующий орган является частью технологического оборудования. Например, при формовании полимерных пленок, асбестоцементных плит, металлического проката толщина изделия регулируется за счет изменения расстояния между прокатными валками, которые и являются в данном случае регулирующим органом.
Структура исполнительного устройства может быть разнообразной. Например, микропроцессорная техника позволяет регуляторы встраивать в исполнительные устройства, тем самым превращая ИУ в комбинированные устройства для управления различными технологическими параметрами.
По виду действия ИУ делятся на нормально открытые (НО) и нормально закрытые (НЗ). При прекращении подвода энергии, создающей перестановочные усилия, проходное сечение нормально открытого ИУ полностью открывается (рис. 74, а), нормально закрытого ИУ — полностью перекрывается (рис. 74, б).
Исполнительные устройства типа НО целесообразно применять, когда при аварийном прекращении подачи воздуха в исполнительный механизм безопасно иметь открытую технологическую линию (трубопровод). В противном случае применяют исполнительные устройства типа НЗ. Например, в ректификационной колонне на технологических линиях подачи исходного сырья и теплоносителя для его подогрева, а также на линиях отбора высококипящего и низко-кипящего компонентов ставят исполнительные устройства типа НЗ; на линиях же подачи пара в куб ректификационной колонны и орошения в верхнюю часть (укрепляющую) ректификационной колонны устанавливают исполнительные устройства типа НО. В случае аварийной ситуации ректификационная колонна работает «сама на себя». Из такого состояния ректификационную колонну легче вывести на заданный режим, чем из состояния полного ее останова.
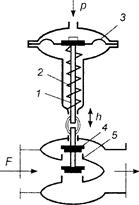
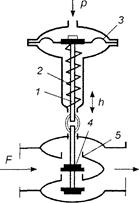
Рис. 74. Схемы клапанов с мембранными исполнительными механизмами:
а — нормально открытый (НО); б — нормально закрытый (НЗ); / — шток; 2 — пружина; 3 — мембрана; 4 — затвор; 5 — седло
Исполнительное устройство является «рабочей лошадкой» процессов управления. Одно из главных требований к ИУ — высокая надежность работы. В большинстве современных контуров управления используются датчики и регуляторы без движущихся частей. Единственным элементом контура, содержащим движущиеся части, остается исполнительное устройство. Следовательно, оно наиболее подвержено износу и коррозии и требует повышенного внимания для того, чтобы находиться в рабочем состоянии. К сожалению, исполнительное устройство является также и наиболее затратным элементом контура регулирования. На его долю приходится от 50 % до 75 % капитальных затрат на контур регулирования и до 90 % затрат на ремонт и текущие расходы.
Правильный выбор и расчет исполнительных устройств имеет первостепенное значение, поскольку погрешности в их работе непосредственно влияют на качество управления.
Основными функциональными блоками ИУ являются исполнительный механизм и регулирующий орган.
12 Программно-технические комплексы на базе контроллеров в составе ЛСУ
13 Исполнительные устройства в составе ЛСУ учебник Акматбекова
Исполнительные устройства САУ. Исполнительные устрой ства (механизмы) предназначены для непосредственного воздействия на рабочий орган. По виду применяемой энергии исполнительные ме ханизмы бывают электрические, гидравлические, пневматические и комбинированные (электрогидравлические и электропневматиче ские). Наиболее надежными являются гидравлические устройства. Конструктивно гидравлические и пневматические устройства вы полняются в виде мембранных, поршневых, сильфонных и лопаст ных. Эти устройства позволяют получать наибольшее усиление для перемещения органа регулирования. К электрическим исполнительным устройствам относятся элек тромагнитные и электромашинные устройства. Исполнительные механизмы могут выполнять простейшие опе рации типа «открыть», «закрыть», в этом случае их называют двухпо зиционным. Исполнительные механизмы могут осуществлять более сложное ступенчатое или плавное регулирование. Исполнительные устройства автоматических регуляторов значительную часть времени работают в переходных режимах, поэтому к ним предъявляются тре бования малой инерционности и повышенной чувствительности. Электромагнитные исполнительные устройства. К устрой ствам этого типа можно отнести реле, соленоиды и электромагнитные муфты. Реле - элемент, в котором изменение входной электрической величины преобразуется в механическое перемещение, замыкающее или размыкающее контакты. Электромагнитные реле, которые при меняются для переключения мощных цепей тока, называют контакто рами. Соленоид представляет собой катушку, внутри которой распо- 215 ложен якорь. При подаче напряжения на катушку якорь приходит в движение и перемещает рабочий орган. В системах автоматики применяются электромагнитные муфты следующих типов: фрикционные, порошковые и муфты скольжения. Фрикционная муфта состоит из двух полумуфт, насаженных на ведущий и ведомый валы. Когда на обмотку ведущей полумуфты по дается напряжение, то полумуфты притягиваются и благодаря трению между ними ведомая полумуфта приводится во вращение, перемещая орган регулирования. В муфтах скольжения момент вращения на ве домый вал передается за счет магнитного поля, создаваемого обмот кой, расположенной на ведущей полумуфте, при вращении которой в ведомой полумуфте индуцируется ток; при взаимодействии двух маг нитных полей возникает момент вращения, приводящий в движение ведомый вал. В системах автоматизации тепловлажной обработки изделий широко распространены электромагнитные вентили типа СВВ и СВМП, в которых исполнительным механизмом служит электромаг нит. На рис.5.6.8 приведена схема простейшего электромагнитного вентиля, который состоит из электромагнита с якорем, пружины и зо лотников. Рисунок 5.6.8 Электромагнитный вентиль: 1 - электромагнит; 2 - якорь; 3- разгрузочный золотник; 4 - золотник; 5 - пружина. Когда на электромагнит напряжение не подаётся, то под действием пружины якорь электромагнита занимает нижнее положение и основ ное отверстие вентиля закрыто золотником. Небольшое отверстие в золотнике закрыто разгрузочным золотником. Необходимое уплотне ние в этом узле достигается за счет перепада давления. При замыка- 216 нии контактов, питающих электромагнит, последний срабатывает и, преодолевая усилие пружины, втягивает якорь в себя. Вентиль откры вается полностью. Таким образом, вентиль потребляет энергию толь ко в том случае, если он открыт. Электромагнитные вентили предна значены для работы совместно с системами дистанционного и авто матического регулирования паро-воздушной и водной среды при тем- пературах до 150°С и давлении до 16 кГс/см. Электромашинные исполнительные устройства. К электро машинным исполнительным устройствам относятся устройства с электрическими двигателями различных типов. Двигатели постоянно го тока обычно используются в системах совместно с электромашин ными усилителями. Для управления такими двигателями применяют тиристорные преобразователи. Двигатели переменного тока приме няются в системах автоматического управления различных классов благодаря их простоте, надежности, малой инерционности и удобства управления. Для включения электродвигателей используются контак торы и магнитные пускатели. В системах автоматического управле ния часто используются исполнительные устройства типов МЭО, МЭОБ, МЭОК, МЭМ, РИМЗ, ИМТМ, ИМ, ПР-М, ДР. Электрические исполнительные механизмы ИМ-2/120 использу ются для перемещения регулирующих органов в системах автомати ческого регулирования, а также в схемах ручного дистанционного управления. Исполнительный механизм ИМ-2/120 состоит из следу ющих основных частей: конденсаторного реверсивного электропри вода, шестеренчатого редуктора, конечных выключателей, реостата обратной связи и кривошипа для соединения с регулирующим орга ном. Общий конец обмоток проводом 2 подключается к сети (рис. 5.6.9). Реверс электродвигателя КД осуществляется переключением конденсатора С последовательно с одной из обмоток с помощью кно пок Bi и В2. При подключении к сети через конечный выключатель KBi двигатель будет вращаться по часовой стрелке, а при подключе нии к сети через выключатель КВ2 направление вращения изменится. Рабочий угол поворота может быть установлен любым в преде лах 120°. Номинальный момент на выходном валу 2 кГм. Время пол ного хода кривошипа на 120° - 40 сек. Исполнительные механизмы с конденсаторными двигателями выполняются с моментами на выходном валу до 45 кГ м. Двухпозици онный исполнительный механизм ДР (рис.5.6.10) состоит из однофаз ного асинхронного электродвигателя и редуктора, находящихся в од- 217 Рисунок 5.6.9 Электрическая схема ИМ-2/120. Рисунок 5.6.10 Исполнительный механизм ДР: 1,2 - контакты; 3 - внутреннее контактное кольцо; 4 - наружное контактное кольцо; 5,6 - конечные выключатели, 7 - движок; 8 - однофазный асинхронный электродвигатель с редуктором. 218 ном корпусе, конечных выключателей, контактов, контактных колец и движка. Когда значение регулируемой величины находится в задан ных пределах, контакты 1 и 2 управляющего прибора разомкнуты (например, реле температуры). Двигатель и движок вращаются, пока движок замыкает кольцо 3 с внешним контактным кольцом 4. До стигнув конечного выключателя 5, движок размыкает цепь питания двигателя и останавливает двигатель. Изменение регулируемого па раметра приведет к замыканию контакта 1. Двигатель включается, движок поворачивается по часовой стрелке и входит в контакт с ниж ней половиной контактного кольца 3 и 4. Регулирующий орган пере мещается, пока движок не дойдёт до конечного выключателя 6. Те перь двигатель снова включится только при замыкании контакта 2, то есть когда регулируемый параметр выйдет за заданные пределы (те перь уже в другую сторону). При этом рабочий орган придет к друго му крайнему положению. Исполнительные механизмы типа ДР осу ществляет как поворот регулирующего органа, так и его поступатель ное движение. Гидравлические и пневматические исполнительные механизмы удобны и надежны в эксплуатации, компактны и просты по конструк ции и поэтому широко применяются в автоматических устройствах. Среди гидравлических и пневматических исполнительных механиз мов наибольшее распространение получили мембранные и поршне вые устройства. Пневматические исполнительные механизмы. Как отмеча лось выше, существуют следующие виды исполнительных механиз мов: мембранные, поршневые, сильфонные и лопастные. Пневмати ческие исполнительные механизмы характеризуются высокой надеж ностью, дешевизной и простотой конструкции. Многие из них обла дают значительной мощностью, т.е. способны при значительном ходе развивать большие перестановочные усилия. Пример поршневого исполнительного механизма в составе уси лителя типа сопло-заслонка показан на рис.5.6.6, а в составе струйно го усилителя - на рис.5.6.7. Наибольшее распространение получили мембранные исполни тельные механизмы (МИМ). Пневматические МИМ предназначены для пропорционального преобразования входного пневматического сигнала в механическое перемещение выходного звена (штока, рыча га). Величина перемещения штока составляет 100 ^ 160мм и рассчита на на работу с золотниковыми регулирующими клапанами. МИМ вы- 219 пускаются конструктивно объединенными с регулирующими клапа нами в единое изделие (рис. 5.6.11). МИМ состоит из мембраны 1 с жестким центром 2, пружины 3, зажатой мембраной и корпусом 4, штока 5, сальников 6 и золотника клапана 7. Рисунок 5.6.11. Рабочее вещество с давлением Рвх поступает во входную камеру и действует на мембрану. Мембрана прогибается, в зависимости от величины давления сжимая или отпуская пружину, и перемещает шток, соединенный с золотником клапана. При этом уменьшается или увеличивается степень открытие клапана, тем самым уменьшая или увеличивая количество вещества или энергии, поступающего на объ ект управления. Мембранные приводы не являются самотормозящимися, т.е. ис чезновение командного сигнала приводит к тому, что рабочий орган, управляемый МИМ, занимает одно из крайних положений: "открыто" или "закрыто". В связи с этим при проектировании системы автомати зации с использованием МИМ необходимо выбрать такой тип рабоче го органа, при котором исчезновение командного сигнала не приведет к опасным нарушениям в работе объекта автоматизации
14 Выбор средств измерений, средств автоматизации и вспомогательных устройств при создании ЛСУ
15 Программное обеспечение локальных систем управления учебник Акматбекова
Современные САУ чаще всего строятся с применением микро контроллера или программируемых логических контроллеров (ПЛК) и промышленных контроллеров. Поэтому они представляют собой программно-технические комплексы (ПТК), т.к. имеют четко выра женную техническую и программную составляющую. Кроме того, со временные ПТК для контроля и управления техническими объектами являются также сетевыми системами, потому что имеют возможность работать в составе компьютерной и телекоммуникационной сети. Для поддержки работы в составе сети универсальные и управ- 137 ляющие компьютеры снабжаются сетевыми операционными систе мами (ОС). ОС выполняет две основные функции: 1) обеспечение пользователю удобств посредством предоставления для него расширенной машины; 2) повышение эффективности использования компьютера путем рационального управления его ресурсами. Использование большинства компьютеров на уровне машинного языка затруднительно ввиду особой трудоемкости программирования. При использовании машинного языка следует указывать не только команду, но и ее многочисленные параметры, которые позволяют за программировать один из возможных вариантов выполнения элемен тарной операции. ОС представляет собой программный интерфейс, позволяющий программисту или оператору максимально просто взаимодействовать с компьютером, не требую детальных знаний аппаратурной организации компьютера и механизмов обработки команд и данных. ОС должна управлять всеми ресурсами вычислительной маши ны таким образом, чтобы обеспечить максимальную эффективность ее функционирования. Управление ресурсами состоит двух общих, не зависящих от типа ресурса задач: ■ планирование ресурса - то есть определение, кому, когда, а для делимых ресурсов и в каком количестве, необходимо выделить данный ресурс; ■ отслеживание состояния ресурса - то есть поддержание оперативной информации о том, занят или не занят ресурс, а для делимых ресурсов, - какое количество ресурса уже распределено, а какое свободно. Для решения этих общих задач управления ресурсами разные ОС используют различные алгоритмы, что, в конечном счете, и определяет их облик в целом, включая характеристики производительности, область применения и даже пользовательский интерфейс. Так, например, алгоритм управления процессором в значительной степени определяет, является ли ОС системой разделения времени, системой пакетной обработки или системой реального времени. 4.2.1 Сетевые операционные системы Сетевая операционная система составляет основу любой 138 вычислительной сети. Каждый компьютер в сети в значительной степени автономен, поэтому под сетевой ОС в широком смысле понимается совокупность ОС отдельных компьютеров, взаимодействующих с целью обмена сообщениями и разделения ресурсов по единым правилам - протоколам. В узком смысле сетевая ОС - это операционная система отдельного компьютера, обеспечивающая ему возможность работать в сети. В сетевой операционной системе отдельной машины можно выделить несколько частей: ■ средства управления локальными ресурсами компьютера: функции распределения оперативной памяти между процессами, планирования и диспетчеризации процессов, управления процессорами в мультипроцессорных машинах, управления периферийными устройствами и другие функции управления ресурсами локальных ОС. ■ средства предоставления собственных ресурсов и услуг в общее пользование - серверная часть ОС (сервер). Эти средства обеспечива ют, например, блокировку файлов и записей, что необходимо для их совместного использования; ведение справочников имен сетевых ре сурсов; обработку запросов удаленного доступа к собственной фай ловой системе и базе данных; управление очередями запросов уда ленных пользователей к своим периферийным устройствам. ■ средства запроса доступа к удаленным ресурсам и услугам и их использования - клиентская часть ОС (редиректор). Эта часть выпол няет распознавание и перенаправление в сеть запросов к удаленным ресурсам от приложений и пользователей, при этом запрос поступает от приложения в локальной форме, а передается в сеть в другой фор ме, соответствующей требованиям сервера. Клиентская часть также осуществляет прием ответов от серверов и преобразование их в ло кальный формат, так что для приложения выполнение локальных и удаленных запросов неразличимо. ■ коммуникационные средства ОС, с помощью которых происхо дит обмен сообщениями в сети. Эта часть обеспечивает адресацию и буферизацию сообщений, выбор маршрута передачи сообщения по сети, надежность передачи и т.п., то есть является средством транс портировки сообщений. Современная ОС, как правило, должна реализовывать мультипрограммную обработку, виртуальную память, свопинг, поддерживать многооконный интерфейс, а также выполнять многие другие, совершенно необходимые функции. Кроме этих 139 функциональных требований к операционным системам предъявляются не менее важные рыночные требования. К этим требованиям относятся: • Расширяемость: код должен быть написан таким образом, что бы можно было легко внести дополнения и изменения, если это по требуется, и не нарушить целостность системы. • Переносимость: код должен легко переноситься с процессора одного типа на процессор другого типа и с аппаратной платформы одного типа на аппаратную платформу другого типа. • Надежность и отказоустойчивость: система должна быть защи щена как от внутренних, так и от внешних ошибок, сбоев и отказов. Ее действия должны быть всегда предсказуемыми, а приложения не должны быть в состоянии наносить вред ОС. • Совместимость: ОС должна иметь средства для выполнения прикладных программ, написанных для других операционных систем. Кроме того, пользовательский интерфейс должен быть совместим с существующими системами и стандартами. • Безопасность: ОС должна обладать средствами защиты ресур сов одних пользователей от других. • Производительность: Система должна обладать настолько хо рошим быстродействием и временем реакции, насколько это позволя ет аппаратная платформа. Рассмотрим более подробно некоторые из этих требований. Расширяемость. В то время как аппаратная часть компьютера устаревает за несколько лет, полезная жизнь операционных систем может измеряться десятилетиями. Примером может служить ОС UNIX. Поэтому операционные системы всегда эволюционно изменя ются со временем, и эти изменения более значимы, чем изменения аппаратных средств. Расширяемость может достигаться за счет мо дульной структуры ОС, при которой программы строятся из набора отдельных модулей, взаимодействующих только через функциональ ный интерфейс. Новые компоненты могут быть добавлены в операци онную систему модульным путем, они выполняют свою работу, ис пользуя интерфейсы, поддерживаемые существующими компонента ми. Прекрасные возможности для расширения предоставляет подход к структурированию ОС по типу клиент-сервер с использованием микро ядерной технологии. В соответствии с этим подходом ОС строится как совокупность привилегированной управляющей про граммы и набора непривилегированных услуг-серверов. Основная часть ОС может оставаться неизменной, в то время как могут быть 140 добавлены новые серверы или улучшены старые. Совместимость. Одним из аспектов совместимости является способность ОС выполнять программы, написанные для других ОС или для более ранних версий данной операционной системы, а также для другой аппаратной платформы. Необходимо разделять вопросы двоичной совместимости и совместимости на уровне исходных тек стов приложений. Двоичная совместимость достигается в том случае, когда можно взять исполняемую программу и запустить ее на выпол нение на другой ОС. Для этого необходимы: совместимость на уровне команд процессора, совместимость на уровне системных вызовов и даже на уровне библиотечных вызовов, если они являются динамиче ски связываемыми. Совместимость на уровне исходных текстов тре бует наличия соответствующего компилятора в составе программного обеспечения, а также совместимости на уровне библиотек и систем ных вызовов. При этом необходима перекомпиляция имеющихся ис ходных текстов в новый выполняемый модуль. Совместимость на уровне исходных текстов важна в основном для разработчиков при ложений, в распоряжении которых эти исходные тексты всегда име ются. Но для конечных пользователей практическое значение имеет только двоичная совместимость, так как только в этом случае они мо гут использовать один и тот же коммерческий продукт, поставляемый в виде двоичного исполняемого кода, в различных операционных средах и на различных машинах. Безопасность. Правила безопасности определяют такие свой ства, как защита ресурсов одного пользователя от других и установ ление квот по ресурсам для предотвращения захвата одним пользова телем всех системных ресурсов. Обеспечение защиты информации от несанкционированного доступа является обязательной функцией се тевых операционных систем. В большинстве популярных систем га рантируется степень безопасности данных, соответствующая уровню С2 в системе стандартов США. Основы стандартов в области без опасности были заложены "Критериями оценки надежных компью терных систем". Этот документ, изданный в США в 1983 году нацио нальным центром компьютерной безопасности (NCSC - National Computer Security Center), часто называют Оранжевой книгой. В со ответствии с требованиями Оранжевой книги безопасной считается такая система, которая "посредством специальных механизмов защи ты контролирует доступ к информации таким образом, что только имеющие соответствующие полномочия лица или процессы, выпол няющиеся от их имени, могут получить доступ на чтение, запись, со 141 здание или удаление информации”. Иерархия уровней безопасности, приведенная в Оранжевой книге, помечает низший уровень безопас ности как D, а высший - как А
16 SCADA системы
SCADA-система – один из основных компонентов, предназначенных для реализации Automation. Цель – сделать информацию о производстве, технологических процессах более доступной для всех подразделений предприятия, а также его клиентов, обеспечить возможность работы с этой информацией в любое время и в любом месте. Область применения SCADA-систем может быть очень широкой. Вот лишь несколько примеров эффективно решаемых задач:
- контроль производства в реальном времени, доступ к технологической информации по необходимости из любого отдела предприятия лил удаленного офиса без ожидания отчетов, возможность оперативного принятия решений не только на технологическом уровне, но и на уровне управления предприятием;
- интеграция данных АСУ ТП с программными системами управления предприятием, возможность создания “цифровой нервной системы” предприятия;
- удаленный мониторинг, необходимый в задачах диспетчеризации транспортных предприятий, систем жизнеобеспечения зданий;
- удаленная диагностика оборудования, оперативное оповещение персонала о сбоях и авариях;
- улучшение сервиса при обслуживании клиентов путем предоставления информации в реальном времени о прохождении заказа, состоянии склада.
Концепция SCADA-систем включает в себя три основные технологии: IBM PC совместимые аппаратные платформы промышленной сети, сеть Ethernet и современные Web-технологии.
Пример системы, в которой реализованы идеи SCADA-систем, показан на рис. 6.
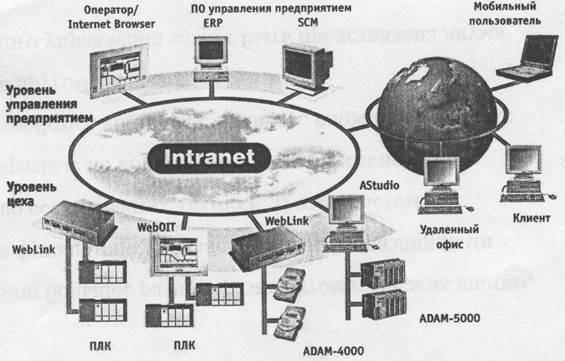
Рис. 6. Пример системы, демонстрирующей возможности
концепции Automation
Все уровни предприятия, производственные цеха, офисы, филиалы, мобильный персонал, а при необходимости и клиенты объединены одной сетью и используют Интернет-технологии для доступа к информации. Фирмы предлагают ряд свободно программируемых IBM PC совместимых устройств, накапливающих информацию и предоставляющих ее всем заинтересованным пользователям с помощью интегрированного Web-сервера.
При таком подходе для работы с технологическими данными клиенту не требуется ничего, кроме компьютера, подключенного к промышленной сети Интернет. Своевременное оповещение персонала, рассылка отчетов возможны средствами электронной почты. Для обмена информацией с программными пакетами управления безнес-процессами предприятия концепция предлагает использовать технологию ОРС.
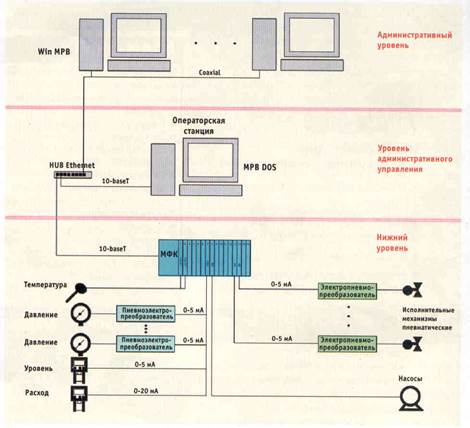
Рис.7. Функциональная схема АСУТП
АСУ ТП в большинстве случаев являются системами организационно-техническими (рис. 7), а это означает наличие функций, выполняемых человеком (оператором). Взаимодействие между оператором и технологическим процессом осуществляется с помощью программного обеспечения, получившего общее название SCАDA.
Функции, которые возлагаются на любую SCADA-систему, независимо от того, является она широко тиражируемым продуктом известной компании или создана специалистами отдела АСУ ТП предприятия для своих конкретных нужд, следующие:
- прием информации о контролируемых технологических параметрах от контроллеров нижних уровней и датчиков (рис. 7);
- сохранение принятой информации в архивах для дальнейшего использования;
- вторичная обработка принятой информации для формирования сводных данных;
- графическое представление хода технологического процесса, а также принятой и архивной информации в удобной для восприятия форме (рис. 8);
- прием команд оператора и передача их в адрес контроллеров нижних уровней и исполнительных механизмов;
- оповещение эксплуатационного и обслуживающего персонала об обнаруженных аварийных событиях, связанных с контролируемым технологическим процессом и функционированием программно-аппаратных средств АСУ ТП с регистрацией действий персонала в аварийных ситуациях (рис. 9);
- формирование сводок и других отчетных документов на основе архивной информации (рис. 10);
- обмен информацией с автоматизированной системой управления предприятием или с так называемой, комплексной автоматизированной системой (КАС);
- непосредственное автоматическое управление технологическим процессом в соответствии с заданными алгоритмами.
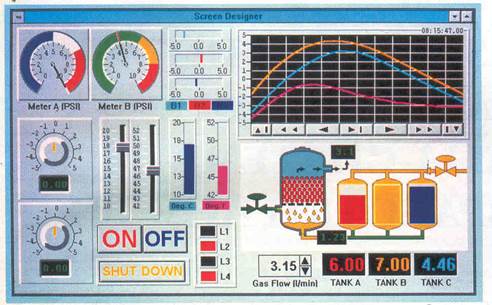
Рис.8. Интерфейс администратора ТП

Рис. 9. Внешний вид журнала событий
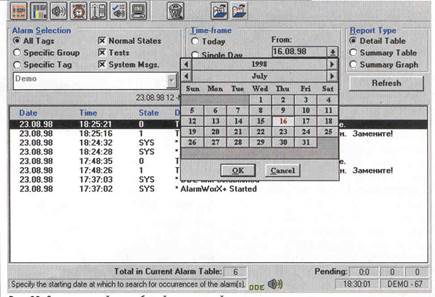
Рис. 10. Сводка аварийных событий за истекший период
Перечисленные ранее функции могут выполняться набором прикладных программ, разработанном практически на любом языке высокого уровня общего назначения. Причем, по быстродействию, ресурсоемкости и другим показателям эффективности программного обеспечения такие программы могут даже опережать аналогичное ПО, созданное с помощью специализированных инструментальных SCADA-систем. Но инструментальные SCADA-системы позволяют значительно ускорить процесс создания ПО верхнего уровня АСУ ПТ, не требуя при этом от разработчика знаний современных процедурных языков программирования общего назначения.
Таблица 8.1
| Условное обозначение
| Наименование
|
|
| Контроль параметров
|
|
| Дистанционное управление технологическим оборудованием и исполнительными устройствами
|
|
| Измерительное преобразование
|
|
| Контроль и сигнализация состояния оборудования и отклонения параметров
|
|
| Стабилизирующее регулирование
|
|
| Выбор режима работы регуляторов и ручное управление задатчиками
|
|
| Ручной ввод данных
|
|
| Регистрация параметров
|
|
| Расчет технико-экономических показателей
|
|
| Учет производства и составления данных за смену
|
|
| Диагностика технологических линий (агрегатов)
|
|
| Распределение нагрузок технологических линий (агрегатов)
|
|
| Оптимизация отдельных технологических процессов
|
|
| Анализ состояния технологического процесса
|
|
| Прогнозирование основных показателей производства
|
|
| Оценка работы смены
|
|
| Контроль выполнения плановых заданий
|
|
| Контроль проведения ремонтов
|
|
| Подготовка и выдача оперативной информации в АСУП
|
|
| Получение производственных ограничений и заданий от АСУП
|
Элементы структурной схемы изображаются, как правило, в виде прямоугольников. Отдельные функциональные службы [отдел главного энергетика (ОГЭ), отдел главного механика (ОГМ), отдел техническо








