Теорема Вариньона о моменте равнодействующей
Если система сил имеет равнодействующую, то момент этой равнодействующей относительно любого центра равен алгебраической сумме моментов сил системы относительно того же центра. Доказательство: Пусть система сил F1, F2, F3 … приводится к равнодействующей, приложенной в точке O. Такая система не находится в равновесии (R ≠ 0). Уравновесим эту систему силой R’, равной равнодействующей R, направленной по линии ее действия в противоположную сторону (аксиома о двух силах).
 Таким образом, система исходных сил F1, F2, F3 … и уравновешивающей силы R’ находится в равновесии и должна удовлетворять уравнениям равновесия, например:
Таким образом, система исходных сил F1, F2, F3 … и уравновешивающей силы R’ находится в равновесии и должна удовлетворять уравнениям равновесия, например:
Поскольку сила R’, равна равнодействующей R и направлена по линии ее действия в противоположную сторону, то MA(R’) = - MA(R). Подстановка этого равенства в уравнение равновесия дает:
Различные формы системы условий равновесия плоской системы сил.
Первая форма условий равновесия
Для равновесия произвольной плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор R этих сил и их главный момент Mo относительно произвольной точки O, лежащей в плоскости действия этих сил, были равны нулю, т.е.
ΣFk = 0, ΣMo(Fk) = 0 (1.3)
В координатной форме эти условия выражаются следующими тремя уравнениями:
ΣFkx = 0, ΣFky = 0, ΣMo(Fk) = 0.
Вторая форма условий равновесия (теорема о трех моментах)
Теорема о трех моментах – алгебраическая сумма моментов сил относительно трех произвольных точек A,B,C, не лежащих на одной прямой, равна нулю, т.е.
ΣMA(Fk) = 0, ΣMB(Fk) = 0, ΣMC(Fk) = 0; (1.5)
Третья форма условий равновесия
Алгебраическая сумма моментов всех сил относительно двух любых точек A и B равна нулю и сумма проекций этих сил на ось Ox, не перпендикулярную к прямой, проходящей через точки A и B, равна нулю, т.е. ΣMA(Fk) = 0, ΣMB(Fk) = 0, ΣFkx = 0. (1.6)
Связи и реакции связей
Свободное тело – свобода перемещений тела не ограничивается никакими другими телами.
Несвободное тело – его движение ограничено другими телами.
Связь – тело, ограничивающее свободу перемещений объекта.
Реакция связи – сила, действующая на объект со стороны связи.
Принцип освобождаемости от связи – несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие соответствующими реакциями.
1. Нить, шарнирный стержень: Реакция нити (стержня) направлена по нити (по стержню).
2. Абсолютно гладкая поверхность: Реакция гладкой поверхности направлена перпендикулярно общей касательной плоскости, проведенной к соприкасающимся поверхностям тела и связи.
3. Неподвижный цилиндрический шарнир: Реакция неподвижного шарнира проходит через центр шарнира перпендикулярно оси шарнира и имеет произвольное направление. Реакцию неподвижного шарнира можно разложить на две составляющие, например, Rx и Ry, параллельные координатным осям.
4. Подвижный цилиндрический шарнир: Реакция подвижного шарнира проходит через центр шарнира перпендикулярно оси шарнира и плоскости опирания.
5. Неподвижный сферический шарнир: Реакция неподвижного сферического шарнира проходит через центр шарнира и имеет произвольное направление в пространстве. Реакцию неподвижного
сферического шарнира можно разложить на три составляющие, например, Rx, Ry, Rz, параллельные координатным осям.
6. Жесткая плоская заделка: В жесткой плоской заделке возникает три реактивных усилия: две составляющие реактивные силы Rx и Ry, а также реактивный момент (пара сил) MA.
Общее правило для связей любого вида:
Если связь препятствует одному или нескольким перемещениям (максимальное число перемещений – три поступательных и три вращательных), то по направлению именно этих и только этих перемещений возникают соответствующие реакции (силы и моменты).
Аксиомы статики
А1. Аксиома инерции – Под действием взаимно уравновешенной системы сил тело находится в состоянии покоя или равномерного прямолинейного движения.
А2. Аксиома двух сил – Если тело под действием двух сил находится в равновесии, то эти силы равны по модулю и направлены по одной прямой в противоположные стороны. Такие две силы представляют собой простейшую взаимно уравновешенную систему сил.
А3. Аксиома присоединения – Если к заданной системе сил присоединить (или изъять) взаимно уравновешенную систему сил, то кинематическое состояние тела не изменится.
Следствие из аксиомы присоединения – Кинематическое состояние тела не изменится, если силу перенести по линии ее действия.
А4. Аксиома параллелограмма – Равнодействующая двух пересекающихся сил равна диагонали параллелограмма, построенного А5. Аксиома действия и противодействия – Всякому действию соответствует равное и противоположное противодействие (III закон Ньютона).
А6. Аксиома отвердевания – Равновесие деформируемого тела сохраняется при его затвердевании (обратное справедливо не всегда).
Принцип освобождаемости от связи – несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие соответствующими реакциями.
Пара сил
Пара сил – совокупность двух параллельных друг другу сил, равных по величине и направленных в противоположные стороны. Пара сил более не может быть упрощена (не может быть заменена одной силой) и представляет собой новую силовую характеристику механического взаимодействия.
Момент пары сил на плоскости равен произведению модуля любой из сил пары на плечо пары, взятым со знаком + (плюс), если вращение плоскости под действием пары сил происходит против часовой стрелки, и со знаком – (минус) в противном случае.
Теорема. Момент пары не зависит от выбора полюса.
В этом можно убедиться вычислением суммы моментов от каждой из сил относительно любого центра, например точки А:

Теорема о сложении пар сил на плоскости – Систему пар сил на плоскости можно заменить одной парой, момент которой равен алгебраической сумме моментов исходных пар. Кинематическое состояние тела не изменится.
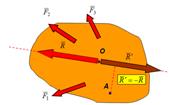
Теорема Вариньона о моменте равнодействующей
Если система сил имеет равнодействующую, то момент этой равнодействующей относительно любого центра равен алгебраической сумме моментов сил системы относительно того же центра. Доказательство: Пусть система сил F1, F2, F3 … приводится к равнодействующей, приложенной в точке O. Такая система не находится в равновесии (R ≠ 0). Уравновесим эту систему силой R’, равной равнодействующей R, направленной по линии ее действия в противоположную сторону (аксиома о двух силах).
Таким образом, система исходных сил F1, F2, F3 … и уравновешивающей силы R’ находится в равновесии и должна удовлетворять уравнениям равновесия, например:
Поскольку сила R’, равна равнодействующей R и направлена по линии ее действия в противоположную сторону, то MA(R’) = - MA(R). Подстановка этого равенства в уравнение равновесия дает: