

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Оглавление
Постановка задачи. 4
Теоретические основы управления движенем. 5
Методы продольного управления. 5
Модели движения в пространстве. 6
Выбор фильтров в разомкнутой системе. 8
Изолированный тангаж.. 9
Изолированное вертикальное перемещение. 12
Выбор фильтров в замкнутой системе. 15
Изолированный тангаж.. 16
Изолированное вертикальное перемещение. 19
Сравнение качества управления. 22
Поведениеобъекта управления при неточно заданных аэродинамических коэффициентах в фильтрах.
. 23
Задача первая. 23
Задача вторая. 25
Заключение. 28
Список литературы.. 30
Постановка задачи
В настоящей работе рассматривается управление движением в продольном канале при наличии дополнительных органов управления. Исследуется задачи управления в прямой и с обратной связьях. Задачи работы включают в себя:
1. Определение передаточных функцией  ,
,  и
и  в короткопериодическом движении в разомкнутом контуре управления в случае постоянного угла тангажа (
в короткопериодическом движении в разомкнутом контуре управления в случае постоянного угла тангажа ( ) и варьируемости угла атаки (
) и варьируемости угла атаки ( ). Определение уравнении фильтров по желаемой передаточной функции
). Определение уравнении фильтров по желаемой передаточной функции
2. Составление и сравнение передаточных функций короткопериодического движения в разомкнутом и замкнутом контурах управления. В случаях с варьируемым углом атаки () при постоянном угле тангажа () и варьируемым углом тангажа
( ) при постоянном угле атаки (
) при постоянном угле атаки ( ). Определение уравнений фильтров.
). Определение уравнений фильтров.
В определении математической модели короткопериодического движения продольного канала, воспользуемся линеаризованной системой уравнений представляющую поведение ЛА в вертикальной плоскости [1]. В исследованиях допускается ряд упрощений, который позволяет упростить математическую модель движения, при сохранении поведения исследуемого объекта. Полагаем, что:
|
|
1. Движение самолета происходит с постоянной скоростью 
2. Движение самолета происходит с постоянной тягой двигателей 
3. Не учитываем влияния изменения угла атаки на скос потока за крылом

Таким образом, исходные линеаризованные уравнения примут вид:




Исходные коэффициенты математической модели движения, необходимые для определения качества управления:





Цель работы включает в себя изучение классических методов управления в продольном канале, создание модели движения самолета, имеющего органы непосредственного управления силами в продольном канале, сравнение качества управления в обеих методах управления и установление преимуществ и недостатков методов.
Теоретические основы управления движением.
Выбор фильтров в разомкнутой системе.

|

|

|

|

|

|

|

|
| Рис. 3 Схема задачи |
Система уравнений задачи имеет вид:
Законы управления системы:



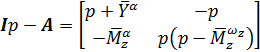
Представим уравнения в уравнение состояния:


Изолированный тангаж
Условием выполнения маневра изолированного тангажа считается 
Управление углом атаки равно нулю:


С помощью уравнения можем определить уравнения фильтров:


С учетом фильтров, уравнения движения примут вид:


Характеристическое уравнение:

Передаточная функция угла атаки от перемещения руля высоты:
Передаточная функция угла тангажа от перемещения руля высоты:
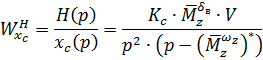
Передаточная функция высоты полета от перемещения руля высоты:
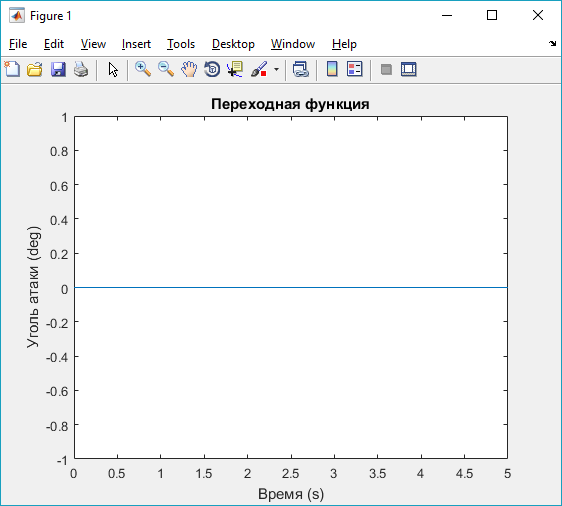
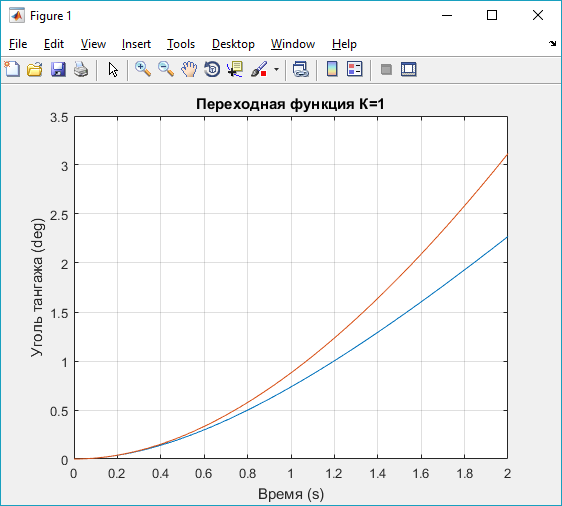
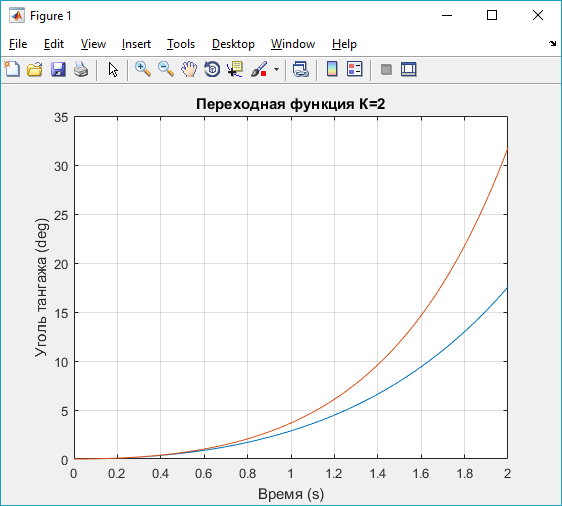
Исследуем поведение самолета при управлении тангажом для значения
 . Проверим как ошибка определения аэродинамического коэффициента
. Проверим как ошибка определения аэродинамического коэффициента  влияет на точность управления по углу тангажа. Предположим, что исходное значение
влияет на точность управления по углу тангажа. Предположим, что исходное значение  считаем истинным, неточное определение коэффициента
считаем истинным, неточное определение коэффициента  . Такое значение ошибки называется грубой ошибкой.
. Такое значение ошибки называется грубой ошибкой.
|
|
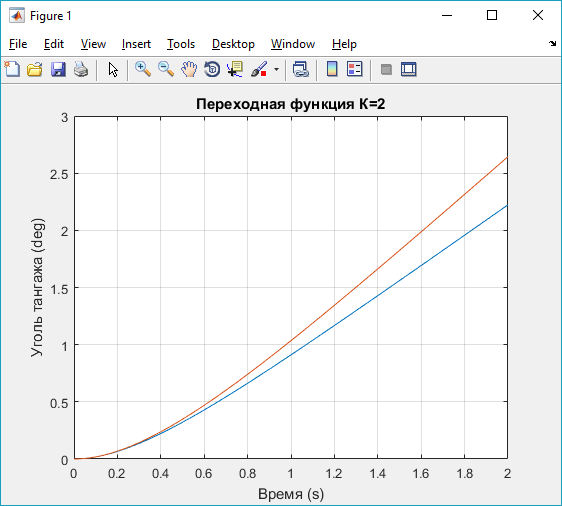
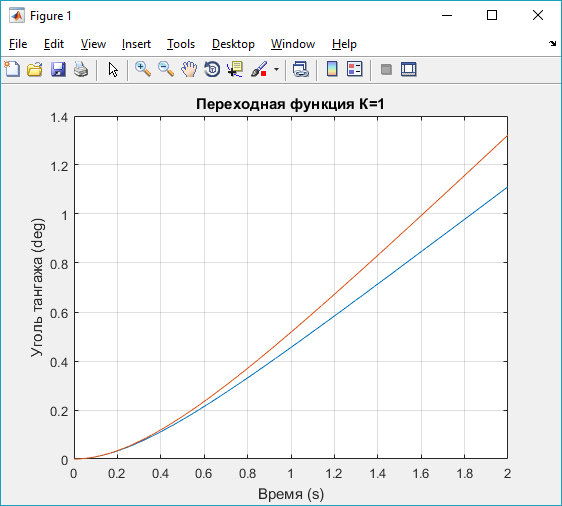
На графике, нижняя линя представляет управление тангажом с учетом истинного значения коэффициента .
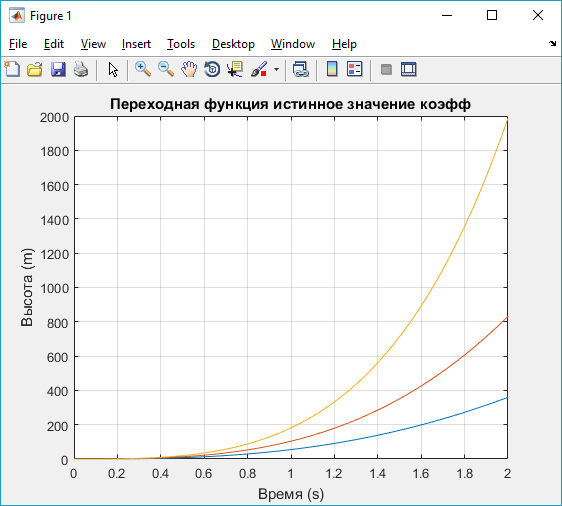
Проверим качество управления на примере изменения высоты:
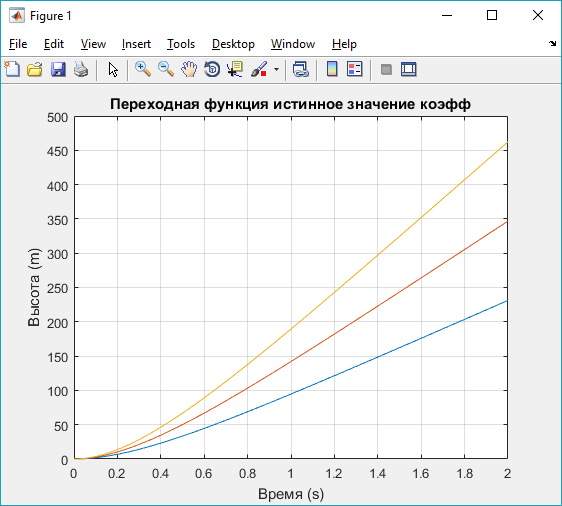
Приведенные графики представляют характеристики для коэффициентов ,  ,
, 
Рис. 4
Система уравнений задачи имеет вид:


Законы управления системы:




Представим уравнения в уравнении состояния:

Изолированный тангаж
Условием выполнения маневра изолированного тангажа считается
Управление углом атаки равняется нулю:


С помощью уравнения можем определить уравнения фильтров:


С учетом фильтров, уравнения движения примут вид:


Характеристическое уравнение:

Передаточная функция угла атаки от перемещения штурвала:
Передаточная функция угла тангажа от перемещения штурвала:

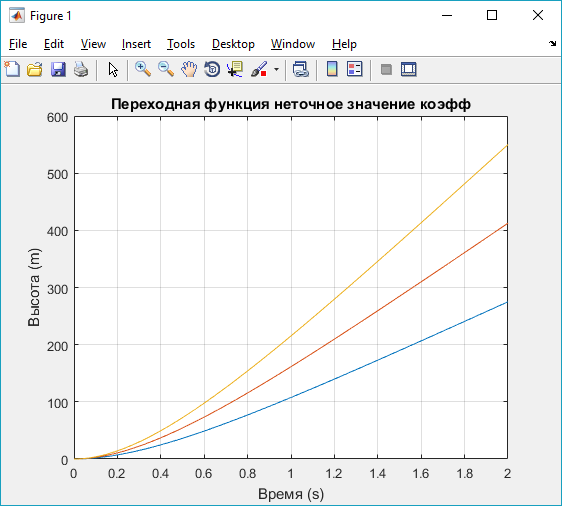
Исследуем поведение самолета при управлении углом атаки для значения . Проверим как ошибка определения аэродинамического коэффициента  влияет на точность управления по углу тангажа. Предположим, что исходное значение считаем истинным, неточное определение коэффициента . Такое значение ошибки называется грубой ошибкой.
влияет на точность управления по углу тангажа. Предположим, что исходное значение считаем истинным, неточное определение коэффициента . Такое значение ошибки называется грубой ошибкой.
На графике, нижняя линя представляет управление тангажом с учетом истинного значения коэффициента .
Проверим качество управления на примере изменения высоты:


Приведенные графики представляют характеристики для коэффициентов , ,
Задача вторая

|

|

|

|

|
|
|

|

|
|
|
Изолированный тангаж



Изолированное вертикальное перемещение 





Заключение
В данной работе были рассмотрены случаи управления в разомкнутом и замкнутом контуре движения самолета в формах: изолированного вертикального перемещения и изолированного тангажа. В двух примерах было показано математическое определение уравнений фильтров. В результате мы пришли к следующим выводам:
1. В работе рассмотрены варианты управления самолетом с органом непосредственного управления подъемной силой в разомкнутом и замкнутом контуре. С учетом законов управления были определены уравнения фильтров:
| № фильтра | Форма движения | Вариант 1 | Вариант 2 |

|
| 
| 
|
|
| 
|
| |

|
|
|
|
|
| 
|
| |

|
|
| |
|
|
2. С целью сравнения качества управления, были исследованы передаточные функции изменения высоты от перемещения штурвала:
|
|

| Форма движения | Вариант 1 | Вариант 2 |

| 
| 
| 
|
|
| 
| 
|
3. В управлении с помощью органов НУПС заметно снижается порядок астатизма системы в сравнении с управлением без органов НУПС. В рассмотрении форм движения с органами НУПС заметно, что управление с постоянным углом тангажа проще чем с постоянным углом атаки.
4. Обратная связь позволяет улучшить характеристики системы с помощью коэффициента усиления . Такое преимущество встречается лишь в управлении с постоянным углом атаки.
5. Неточное определение аэродинамических коэффициентов с относительной ошибкой порядка около 20%, незначительно влияет на характер поведения модели движения с отсутствием обратной связи. В рассмотренном случае изолированного тангажа выражение характеристического уравнения:  влияет на поведение модели движения по углу тангажа следующим образом:
влияет на поведение модели движения по углу тангажа следующим образом:
 – система становится очень чувствительной и неустойчивой.
– система становится очень чувствительной и неустойчивой.
 – система устойчива.
– система устойчива.
Не желаемые явления можно парировать с помощью коэффициента усиления .
6. Влияние неточности, более заметно в разомкнутом контуре управления, нежели в замкнутом.
7. Углы атаки и тангажа можно устранять с помощью соответствующего значения коэффициента усиления.
Список литературы
1. Динамика полета: Учебник для студентов высших учебных заведений / А.В. Ефремов, В.Ф. Захарченко, В.Н. Овчаренко и др.; под ред. Г.С. Бюшгенса —М.: Машиностроение, 2011.
2. Гуськов Ю.П., Загайнов Г.И: Управление полётом самолётов: Машиностроение 1980г.
3. Ким Д. П. Теория автоматического управления. Т. 1. Линейные системы. - М.: Физматлит,
4. В. Г. Воробьев, С. В. Кузнецов: Автоматическое Управление Полетом Самолетов: Транспорт, 1995
5. В. В. Воробьев, А. М. Киселев, В. В. Поляков: Системы Управления Летательных Аппаратов: Издание ВВИА имении профессора Н. Е. Жуковского, 2008
6. Дьяконов В.П.: MATLAB Польный самоучитель: ДМК, 2014.
Оглавление
Постановка задачи. 4
Теоретические основы управления движенем. 5
Методы продольного управления. 5
Модели движения в пространстве. 6
|
|
Выбор фильтров в разомкнутой системе. 8
Изолированный тангаж.. 9
Изолированное вертикальное перемещение. 12
Выбор фильтров в замкнутой системе. 15
Изолированный тангаж.. 16
Изолированное вертикальное перемещение. 19
Сравнение качества управления. 22
Поведениеобъекта управления при неточно заданных аэродинамических коэффициентах в фильтрах.
. 23
Задача первая. 23
Задача вторая. 25
Заключение. 28
Список литературы.. 30
Постановка задачи
В настоящей работе рассматривается управление движением в продольном канале при наличии дополнительных органов управления. Исследуется задачи управления в прямой и с обратной связьях. Задачи работы включают в себя:
1. Определение передаточных функцией , и в короткопериодическом движении в разомкнутом контуре управления в случае постоянного угла тангажа () и варьируемости угла атаки (). Определение уравнении фильтров по желаемой передаточной функции
2. Составление и сравнение передаточных функций короткопериодического движения в разомкнутом и замкнутом контурах управления. В случаях с варьируемым углом атаки () при постоянном угле тангажа () и варьируемым углом тангажа
() при постоянном угле атаки (). Определение уравнений фильтров.
В определении математической модели короткопериодического движения продольного канала, воспользуемся линеаризованной системой уравнений представляющую поведение ЛА в вертикальной плоскости [1]. В исследованиях допускается ряд упрощений, который позволяет упростить математическую модель движения, при сохранении поведения исследуемого объекта. Полагаем, что:
1. Движение самолета происходит с постоянной скоростью
2. Движение самолета происходит с постоянной тягой двигателей
3. Не учитываем влияния изменения угла атаки на скос потока за крылом
Таким образом, исходные линеаризованные уравнения примут вид:
Исходные коэффициенты математической модели движения, необходимые для определения качества управления:
Цель работы включает в себя изучение классических методов управления в продольном канале, создание модели движения самолета, имеющего органы непосредственного управления силами в продольном канале, сравнение качества управления в обеих методах управления и установление преимуществ и недостатков методов.
Теоретические основы управления движением.
|
|
|

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!