Инструкция к драйверу ШД BL-TB6560-V2.0.
Статьи 13  14.05.2015
14.05.2015

Содержание
1. Введение
2. Внешний вид
3. Описание
4. Схемы подключения
5. Подключение драйвера к периферии
6. Настройка переключателей
7. Подключение силовых цепей
8. Светодиодная индикация
Введение:
BL-TB6560-V2.0 - драйвер управления двухфазным шаговым двигателем реализован на специализированном интегральной микросхеме Toshiba TB6560AHQ c питанием постоянным напряжением от 10В до 35В (рекомендуется 24В). Используется для управления двигателями типа Nema17, Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах.
Внешний вид:



| ОСНОВНЫЕ ХАРАКТЕРИСТИКИ:
|
| Свойства
| Параметры
|
| Входное напряжение
| от 10В до 35В постоянного напряжения (24В рекомендуется)
|
| Выходной ток
| от 0.3А до 3А (пиковое значение 3.5А)
|
| Микрошаг
| 1.. 2.. 8.. 16
|
| Регулировки тока
| 14 ступеней
|
| Температура эксплуатации
| от -10 до - 45° С
|
| Диагностика
| защита от перегрева
|
| Размеры
| 75мм*50мм*35мм
|
| Вес
| 73г
|
Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| РАЗЪЕМЫ НА ПЛАТЕ
|
| Маркировка
| Описание
|
| CLK+,CLK-
| Положительный и отрицательный контакты для тактового сигнала
|
| CW+,CW-
| Положительный и отрицательный контакты для управления направлением вращения оси шагового двигателя
|
| EN+,EN-
| Положительный и отрицательный контакты для сигнала работы шагового двигателя
|
| +24D,GND
| Положительный и отрицательный контакты для подключения блока питания
|
| A+,A-
| Контакты для подключения I фазной обмотки шагового двигателя
|
| B+,B-
| Контакты для подключения II фазной обмотки шагового двигателя
|
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором
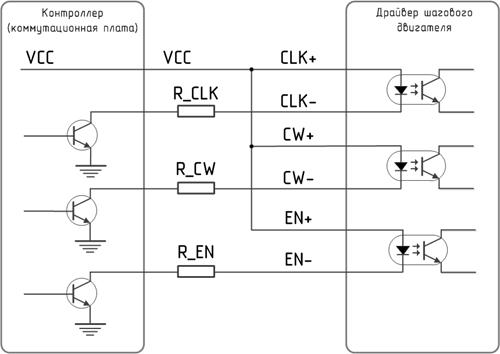
Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором

Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
· При VCC = 5В, R_CLK = R_CW = R_EN = 0;
· При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
· При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
Подключение драйвера к периферии:
Пример подключения драйвера к контролллеру BL-MACH-V1.1 (BB5001)

Представленные на схеме драйвер и контроллер можно приобрести в нашем магазине:
· КУПИТЬ контроллер BL-MACH-V1.1
· КУПИТЬ драйвер BL-TB6560-V2.0.
Настройка переключателей
Микрошаг (делитель шага) устанавливается с помощью переключателей S3, S4 как показано на рисунке:

Микрошаг - режим управления шаговым двигателем, под которым понимают режим деления шага. Микрошаговый режим отличается от простого режима полношагового управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону SIN в одной фазе и COS во второй. Такой принцип позволяет фиксировать вал в промежуточных положениях между целыми шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:16 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/16 полного шага, и для полного оборота вала потребуется подать в 16 раз больше импульсов, чем для режима полного шага.
Значения делителя шага указаны в таблице ниже:
| МИКРОШАГ (ДЕЛИТЕЛЬ ШАГА)
|
| Значение делителя
| S3
| S4
|
| 1:1
| OFF
| OFF
|
| 1:2
| ON
| OFF
|
| 1:8
| ON
| ON
|
| 1:16
| OFF
| ON
|
Настройка выходного тока, который поступает на шаговый двигатель, в режиме удержания осуществляется с помощью переключателя S2:

Удержание ротора - режим работы шагового двигателя когда подача напряжения производится на все обмотки. Момент удержания является одной из характеристик мощности шаговых двигателей.
| ТОК РЕЖИМА УДЕРЖАНИЯ
|
| Значение тока
| S2
|
| 20%
| ON
|
| 50%
| OFF
|
Установка выходного тока в рабочем режиме двигателя (вращение) устанавливается с помощью переключателей SW1, SW2, SW3, S1:

| ТОК РАБОЧЕГО РЕЖИМА
|
| (А)
| 0.3
| 0.5
| 0.8
| 1.0
| 1.1
| 1.2
| 1.4
| 1.5
| 1.6
| 1.9
| 2.0
| 2.2
| 2.6
| 3.0
|
| SW1
| OFF
| OFF
| OFF
| OFF
| OFF
| ON
| OFF
| ON
| ON
| ON
| ON
| ON
| ON
| ON
|
| SW2
| OFF
| OFF
| ON
| ON
| ON
| OFF
| ON
| OFF
| OFF
| ON
| OFF
| ON
| ON
| ON
|
| SW3
| ON
| ON
| OFF
| OFF
| ON
| OFF
| ON
| ON
| OFF
| OFF
| ON
| ON
| OFF
| ON
|
| S1
| ON
| OFF
| ON
| OFF
| ON
| ON
| OFF
| ON
| OFF
| ON
| OFF
| ON
| OFF
| OFF
|
Из-за разности параметров двигателей и их режимов возникает необходимость коррекции формы дискретных импульсов для приближения их к синусоиде. И в драйвере есть такая возможность.
Decay - параметр, который описывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) - Decay = 0%, для треугольного - Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации.

| DECAY SETTING
|
| %
| S5
| S6
|
|
| OFF
| OFF
|
|
| ON
| OFF
|
|
| OFF
| ON
|
|
| ON
| ON
|
Подключение силовых цепей:
При подключении шаговых двигателей к драйверу допускается как паралельное, так и последовательное включение. Единственное что необходимо учесть - для паралельного включения выходной ток драйвера необходимо устанавливать выше, а при включении последовательном достаточным будет ток как для одного двигателя.
Светодиодная индикация
· POWER: индикатор питания
· RUN: индикатор рабочего режима

Тэги: руководство
Инструкция к драйверу ШД BL-TB6560-V2.0.
Статьи 13 14.05.2015
Содержание
1. Введение
2. Внешний вид
3. Описание
4. Схемы подключения
5. Подключение драйвера к периферии
6. Настройка переключателей
7. Подключение силовых цепей
8. Светодиодная индикация
Введение:
BL-TB6560-V2.0 - драйвер управления двухфазным шаговым двигателем реализован на специализированном интегральной микросхеме Toshiba TB6560AHQ c питанием постоянным напряжением от 10В до 35В (рекомендуется 24В). Используется для управления двигателями типа Nema17, Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах.
Внешний вид:
| ОСНОВНЫЕ ХАРАКТЕРИСТИКИ:
|
| Свойства
| Параметры
|
| Входное напряжение
| от 10В до 35В постоянного напряжения (24В рекомендуется)
|
| Выходной ток
| от 0.3А до 3А (пиковое значение 3.5А)
|
| Микрошаг
| 1.. 2.. 8.. 16
|
| Регулировки тока
| 14 ступеней
|
| Температура эксплуатации
| от -10 до - 45° С
|
| Диагностика
| защита от перегрева
|
| Размеры
| 75мм*50мм*35мм
|
| Вес
| 73г
|
Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| РАЗЪЕМЫ НА ПЛАТЕ
|
| Маркировка
| Описание
|
| CLK+,CLK-
| Положительный и отрицательный контакты для тактового сигнала
|
| CW+,CW-
| Положительный и отрицательный контакты для управления направлением вращения оси шагового двигателя
|
| EN+,EN-
| Положительный и отрицательный контакты для сигнала работы шагового двигателя
|
| +24D,GND
| Положительный и отрицательный контакты для подключения блока питания
|
| A+,A-
| Контакты для подключения I фазной обмотки шагового двигателя
|
| B+,B-
| Контакты для подключения II фазной обмотки шагового двигателя
|
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором
Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором
Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
· При VCC = 5В, R_CLK = R_CW = R_EN = 0;
· При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
· При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
Подключение драйвера к периферии:
Пример подключения драйвера к контролллеру BL-MACH-V1.1 (BB5001)
Представленные на схеме драйвер и контроллер можно приобрести в нашем магазине:
· КУПИТЬ контроллер BL-MACH-V1.1
· КУПИТЬ драйвер BL-TB6560-V2.0.
Настройка переключателей
Микрошаг (делитель шага) устанавливается с помощью переключателей S3, S4 как показано на рисунке:
Микрошаг - режим управления шаговым двигателем, под которым понимают режим деления шага. Микрошаговый режим отличается от простого режима полношагового управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону SIN в одной фазе и COS во второй. Такой принцип позволяет фиксировать вал в промежуточных положениях между целыми шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:16 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/16 полного шага, и для полного оборота вала потребуется подать в 16 раз больше импульсов, чем для режима полного шага.
Значения делителя шага указаны в таблице ниже:
| МИКРОШАГ (ДЕЛИТЕЛЬ ШАГА)
|
| Значение делителя
| S3
| S4
|
| 1:1
| OFF
| OFF
|
| 1:2
| ON
| OFF
|
| 1:8
| ON
| ON
|
| 1:16
| OFF
| ON
|
Настройка выходного тока, который поступает на шаговый двигатель, в режиме удержания осуществляется с помощью переключателя S2:
Удержание ротора - режим работы шагового двигателя когда подача напряжения производится на все обмотки. Момент удержания является одной из характеристик мощности шаговых двигателей.
| ТОК РЕЖИМА УДЕРЖАНИЯ
|
| Значение тока
| S2
|
| 20%
| ON
|
| 50%
| OFF
|
Установка выходного тока в рабочем режиме двигателя (вращение) устанавливается с помощью переключателей SW1, SW2, SW3, S1:
| ТОК РАБОЧЕГО РЕЖИМА
|
| (А)
| 0.3
| 0.5
| 0.8
| 1.0
| 1.1
| 1.2
| 1.4
| 1.5
| 1.6
| 1.9
| 2.0
| 2.2
| 2.6
| 3.0
|
| SW1
| OFF
| OFF
| OFF
| OFF
| OFF
| ON
| OFF
| ON
| ON
| ON
| ON
| ON
| ON
| ON
|
| SW2
| OFF
| OFF
| ON
| ON
| ON
| OFF
| ON
| OFF
| OFF
| ON
| OFF
| ON
| ON
| ON
|
| SW3
| ON
| ON
| OFF
| OFF
| ON
| OFF
| ON
| ON
| OFF
| OFF
| ON
| ON
| OFF
| ON
|
| S1
| ON
| OFF
| ON
| OFF
| ON
| ON
| OFF
| ON
| OFF
| ON
| OFF
| ON
| OFF
| OFF
|
Из-за разности параметров двигателей и их режимов возникает необходимость коррекции формы дискретных импульсов для приближения их к синусоиде. И в драйвере есть такая возможность.
Decay - параметр, который описывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) - Decay = 0%, для треугольного - Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации.
| DECAY SETTING
|
| %
| S5
| S6
|
|
| OFF
| OFF
|
|
| ON
| OFF
|
|
| OFF
| ON
|
|
| ON
| ON
|
Подключение силовых цепей:
При подключении шаговых двигателей к драйверу допускается как паралельное, так и последовательное включение. Единственное что необходимо учесть - для паралельного включения выходной ток драйвера необходимо устанавливать выше, а при включении последовательном достаточным будет ток как для одного двигателя.






