Пуск асинхронного двигателя с короткозамкнутым ротором небольшой и средней мощности обычно осуществляется при полном напряжении (прямой пуск).
Иногда пуск двигателей с короткозамкнутым ротором с целью ограничения тока или момента осуществляется при напряжении, пониженном с помощью дополнительных резисторов или реакторов, включаемых в цепь статора, или же посредством тиристорного регулятора напряжения.
Снижение пускового тока осуществляют также переключением соединения статорных обмоток – пуск осуществляется при соединении Y, а затем соединяют статорные обмотки в Δ.
Пуск двигателей с фазным ротором осуществляется посредством пускового резистора Rр, включаемого в цепь ротора двигателя (рис.15). Число пусковых ступеней резистора и величина их сопротивлений определяются условиями пуска электропривода.
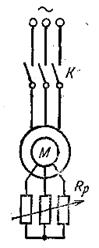
Рис.15 Схема пуска асинхронного двигателя с фазным ротором
Частотное управление асинхронным электроприводом
Регулирование частоты вращения ротора асинхронного двигателя основано на уравнении частоты вращения магнитного поля статора
 ,
,
где f1 – частота питающего напряжения, p – число пар полюсов.
При этом следует учитывать, что кроме частоты питающего напряжения следует менять также и его величину. При постоянном напряжении регулирование величины f1 вверх от номинального значения приведет к падению магнитного потока статора, т.е. к падению вращающего момента. Регулирование вниз от номинального значения приведет к снижению индуктивного сопротивления и увеличению тока статора. В этом случае двигатель будет работать в режиме глубокого насыщения магнитопровода, что обеспечит высокий уровень потерь в стали.
При частотном управлении оперируют относительными значениями напряжения U* и частоты f*
 ,
,
где Uj, fj – мгновенные значения напряжения и частоты; Uн, fн – номинальные значения.
Характеристики асинхронного электропривода при частотном управлении
Пренебрегая активным сопротивлением, для сохранения значения критического момента требуется изменять напряжение и частоту по закону
 .
.
Такой закон частотного управления называется пропорциональным. При этом получают механические характеристики (сплошные линии на рис.16)

Рис.16 Механические характеристики асинхронного двигателя при частотном управлении
В машинах малой мощности влияние активного сопротивления при использовании пропорционального закона управления сказывается на механической характеристике (пунктирные линии на рис.23).
Для учета активного сопротивления следует пользователься законом пропорционального регулирования с Ir - компенсацией.
 .
.
Закон М.П. Костенко
В ряде случаев не требуется поддерживать мгновенное значение момента, равное критическому. В этом случае пользуются соотношением Mj/Mк=const и пользуются следующей формулой (закон М.П. Костенко)
 ,
,
где Mc*=Mc/Mн – относительное значение статического момента при данной частоте вращения.
При использовании закона М.П. Костенко для Mc* =1 при превышении значения f*= 1 дальше меняется только частота при постоянном значении U* =1, поскольку невозможно превысить значение напряжения источника питания. В этом случае электропривод работает в режиме постоянства мощности и получают механические характеристики, показанные на рис.17

Рис.17 Механические характеристики асинхронного двигателя





