Векторное управление частотно-регулируемого асинхронного электропривода связано как с изменением частоты и амплитуды переменных АД, так и угла между переменными. Изменением амплитудных значений переменных и углов между их векторами обеспечивается гораздо лучшее качество переходных процессов, чем со скалярным управлением.
Информация о текущих значениях и пространственном положении векторов переменных АД может быть получена прямым их измерением с помощью соответствующих датчиков, или косвенно на базе математической модели АД. При сложности вычислительных операций и алгоритмов управления электроприводом преимущество систем с косвенным регулированием в простоте технических решений и, следовательно, в практической надежности.
Система векторного управления асинхронным электроприводом в общем случае обязана решать задачи стабилизации и регулирования скорости и момента двигателя.

 Образование момента АД возможно воздействием на абсолютные значения векторов потокосцеплений
Образование момента АД возможно воздействием на абсолютные значения векторов потокосцеплений 

 , токов
, токов 
 и фазовых сдвигов между ними. Например:
и фазовых сдвигов между ними. Например:
 ,
,
где L12 – взаимные индуктивности; L2`- собственная индуктивность ротора; - вектор потокосцепления ротора; - вектор тока статора.
Принцип построения и техническая реализация систем управления электроприводом зависит от того, какие вектора выбраны в качестве регулируемых.
В качестве регулируемых векторов выберем  и
и  . Их векторные диаграммы при ориентации
. Их векторные диаграммы при ориентации  по оси x системы координат хy, вращающейся с синхронной скоростью поля двигателя, показаны на рис.6.3. Здесь же даны проекции вектора тока статора на оси x, y, а также на оси a, b неподвижной системы координат, связанной со статором АД.
по оси x системы координат хy, вращающейся с синхронной скоростью поля двигателя, показаны на рис.6.3. Здесь же даны проекции вектора тока статора на оси x, y, а также на оси a, b неподвижной системы координат, связанной со статором АД.
Составляющие вектора
в системе координат ab могут быть подсчитаны через токи фаз статора
I А,
I В,
I С (при условии инвариантности мощности АД в двухфазной и трехфазной системах координат):
 ;
;  . (6.1)
. (6.1)
В систему координат xy проекции векторов тока I 1 a и I 1 b пересчитываются как:

 ;
;  . (6.2)
. (6.2)
Они представлены сигналами постоянного тока и не зависят от частоты питания АД. Имея в виду это, система векторного управления может строиться подобно системам управления двигателями постоянного тока, где составляющая I 1 x тока статора определяет потокосцепление y 2 АД (аналогично магнитному потоку ДПТ), а составляющая I 1 у является моментной составляющей тока статора (аналогично току якоря ДПТ).

Рис.6.3. Векторные диаграммы переменных АД при ориентации системы координат xy по потокосцеплению ротора
По аналогии с ДПТ в канале управления скоростью следует иметь внутренний контур управления составляющей тока статора I 1 у , эквивалентной току якоря ДПТ, и внешний контур управления угловой скоростью ротора. Канал управления модулем потокосцепления y 2 должен иметь контур управления составляющей тока статора I 1 x, равный току возбуждения ДПТ.
При стабилизации потокосцепления ротора (Y2 = const) механические характеристики АД похожи к характеристикам ДПТ независимого возбуждения.
Такая система векторного управления Transvektor впервые предоставлена фирмой Siemens (ФРГ). Эта система обладает двумя внешними контурами регулирования: модулем вектора потокосцепления ротора ½ Y2 ½ и угловой скоростью w ротора, а также пара подчиненных им внутренних контура регулирования составляющих тока статора I 1 x и I 1 y в осях x и y ортогональной системы координат, вращающейся с синхронной скоростью w 0 электрического поля двигателя. Система выполняет независимое управление модулем вектора потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности между моментом двигателя и составляющей намагничивающей силы статора, находящейся в квадратуре с волной потокосцепления ротора (рис.6.4).
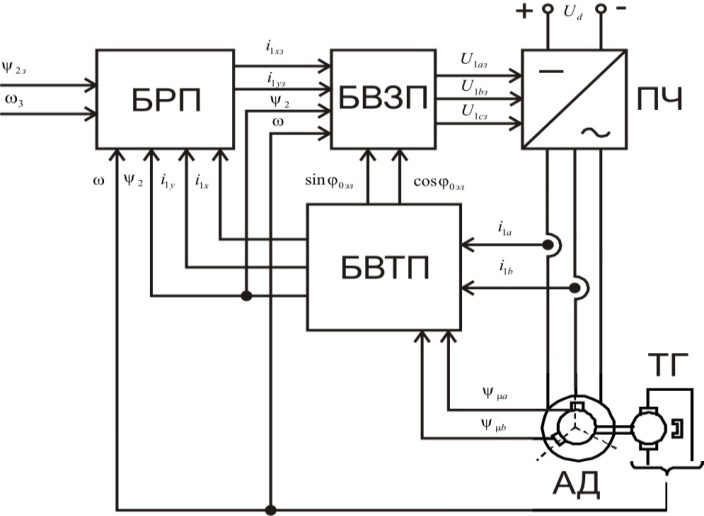
Рис.6.4. Функциональная схема системы векторного управления АД
Система управления имеет три крупных блока: блок вычисления текущих величин переменных БВТП, блок регуляторов переменных БРП и блок вычисления заданных величин переменных - управляющих воздействий БВЗП.
Чтобы вычислить фазу и амплитуду переменной трехфазного двигателя, надо определить мгновенные величины этой переменной в двух фазах двигателя. Блок БВТП меняет измеренные с датчиков Холла трехфазные мгновенные величины потока в воздушном зазоре  и
и  (в нынешних системах эти значения определяются без наличия датчиков Холла), и определенные датчиком тока действительные трехфазные переменные токи
(в нынешних системах эти значения определяются без наличия датчиков Холла), и определенные датчиком тока действительные трехфазные переменные токи  и
и  в ориентированные по полю величины потокосцепления ротора
в ориентированные по полю величины потокосцепления ротора  , намагничивающего тока
, намагничивающего тока  и активного тока
и активного тока  .
.
Задающие сигналы  и
и  поступающие на вход блока регуляторов БРП с ориентированными по полю величинами переменных применяются для определения заданных величин переменных
поступающие на вход блока регуляторов БРП с ориентированными по полю величинами переменных применяются для определения заданных величин переменных  и
и  , при помощи которых блок вычисления задающих сигналов БВЗП создает синусоидальные напряжения управления преобразователем
, при помощи которых блок вычисления задающих сигналов БВЗП создает синусоидальные напряжения управления преобразователем  и
и  .
.
В современных частотно-регулируемых электроприводах системы программного управления реализованы на базе микропроцессорной техники, данные о векторах потокосцеплений электрической машины, поступают косвенным путем на положение ее математических моделей. Наряду с этим ключевыми являются структуры управления с косвенной ориентацией по вектору потокосцепления ротора и модульным принципом построения систем управления. Оно реализует возможность сочетаний различных структур управления скоростью и моментом АД, в том числе как прямое (с помощью тахогенератора), так и косвенное (по модели) нахождение действительной скорости двигателя.
Нами принята система векторного управления с косвенной ориентацией по вектору потокосцепления ротора.






