

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Кафедра вычислительных методов механики деформируемого тела
Горх Эдуард Владимирович
Выпускная квалификационная работа бакалавра
Потеря устойчивости мостичного амортизатора из эластомера
Направление 010400
Прикладная математика и информатика
Научный руководитель,
кандидат физ.-мат. наук,
доцент
Кабриц С.А.
Санкт-Петербург
Содержание
Введение................................................................................................. 3
Постановка задачи................................................................................. 4
Обзор литературы................................................................................. 6
Глава 1. Математическая формулировка задачи................................. 7
1.1. Основные зависимости для арки-полоски.................................. 8
1.2. Решение поставленной задачи................................................... 12
Глава 2. Методы численного решения............................................... 15
2.1 Метод стрельбы.......................................................................... 16
2.2 Метод продолжения по параметру............................................ 17
Глава 3. Анализ результатов.............................................................. 18
3.1 Алгоритм нахождения точки бифуркации................................ 18
3.2. Бифуркация................................................................................ 20
3.3. Изолированное решение........................................................... 27
Выводы................................................................................................. 31
Заключение........................................................................................... 32
Список литературы.............................................................................. 33
Введение
Во многих областях современной техники для снижения перегрузок при ударе и изоляции вибраций широко используются различные типы амортизаторов. В одних случаях они защищают основание от действия динамических сил, в других позволяют уменьшить динамические воздействия, передаваемых на амортизируемый объект от движущегося с переменным ускорением основания.
|
|
Для поглощения перегрузок, испытываемых конструкцией при ударных воздействиях, необходимо применение амортизаторов, имеющих мягкую характеристику. Такими амортизаторами являются, в частности, амортизаторы мостичного типа. Изменяя геометрические и физические параметры эластомеров, можно изменять вид их упругой характеристики, что особенно важно для противоударных амортизаторов. Наличие значительного внутреннего трения в материале позволяет достичь хорошей виброизоляции в области высоких частот и уменьшить возможность возникновения резонансных колебаний с большими амплитудами.
Основная сложность при расчетах деформаций различных изделий из эластомера возникает из-за нелинейности задачи.
Постановка задачи
В рамках нелинейной теории тонких оболочек из эластомера [4] рассматривается задача о бифуркации мостичного амортизатора при сжатии. Под бифуркацией понимается ответвление от симметричного решения в несимметричное.

|

|

|

|

|

|
| Рис. 1. Рассматриваемый мостичный амортизатор |

|

|
Целью работы является исследовать бифуркации от симметричного состояния при различных конфигурациях системы (рис. 2) и выяснить, при каких начальных углах они возможны.
| Несимметричная конфигурация |
| Симметричная конфигурация |
|
|
|
|
|
|
|
|
|
|
|
|
| Рис. 2. Конфигурации амортизатора при сжатии |
|
|
Программная реализация решения поставленной задачи написана в среде MATLAB.
Обзор литературы
В 1981 вышла статья [2], в которой исследуется симметричное сжатие мостичного амортизатора. Построены жесткостные характеристики для разных начальных углов и толщин, приведена граница раздела областей мягкой и жесткой характеристик амортизатора. Основы нелинейной теории упругости для эластомеров были заложены Черныхом К.Ф. [3]. В [1] рассмотрена бифуркация подобной модели при условии заделки у верхнего основания. Также, там предполагается, что металлическая пластина имеет возможность поворачиваться.
В [4] группой авторов были изложены основные разделы нелинейной теории упругих оболочек из эластомеров. В работах [5–6] Кабриц С.А. и Колпак Е.П. описывают способы численного поиска точек ветвления и связанные с этим проблемы.
В учебнике [7], Бахвалов Н.С. описал метод стрельбы применительно к решению нелинейных краевых задач для систем дифференциальных уравнений.
В работе [8] подробно излагается приложение метода продолжения по параметру к проблеме неединственности решения нелинейных задач теории упругих оболочек.
В учебнике [9] подробно освещаются вопросы устойчивости механических систем, определяются критические нагрузки, предельные точки и точки бифуркации. Пановко Я.Г. и Губанова И.И. в работе [10] объяснили использование метода деидеализации для нахождения бифуркационных ветвей на примере задачи о внецентренном сжатии стержня.
Различные вопросы о подобных амортизаторах рассматриваются уже в течение многих лет. Например, в вестнике МГТУ им. Баумана в статьях [11–12] рассматривается модель нелинейного плоского напряженного состояния теории упругости при допущении сжимаемости материала. Были проведены расчеты деформаций мостичных амортизаторов с помощью МКЭ.
Решение поставленной задачи
Введем обозначение  для (1.1) и
для (1.1) и  для (1.2). Систему дифференциальных уравнений (1.1) можно представить в виде:
для (1.2). Систему дифференциальных уравнений (1.1) можно представить в виде:

| (1.4) |
а систему (1.2) в виде:

| (1.5) |
Граничные условия (1.3) можно записать в виде:
|
|

| (1.6) |
Задача сводится к решению систем (1.4), (1.5) с граничными условиями (1.6).
Для нахождения точек разветвления решений используется идея метода деидеализации [9]. В данной работе рассматривается два варианта введения неидеальностей:
а) приложение усилия  ;
;
б) фиксированное смещение верхней пластины по оси  ,
,
которые ниже будут изложены подробнее.
Алгоритм решения
Задача решается методом стрельбы. Он сводит краевую задачу к задаче Коши. Задача Коши для системы дифференциальных уравнений решается численно методом Рунге – Кутты – Мерсона. Далее методом Ньютона решается система нелинейных уравнений. В качестве начального приближения задается нулевой вектор, так как он является решением для ненагруженного состояния амортизатора. При дальнейшем выборе начальных приближений используетя метод продолжения по параметру. Матрица производных в методе Ньютона считается численно.
Стоит отметить, что, в случае приближения к точке бифуркации, матрицы Якоби становятся плохо обусловленными. В самой точке бифуркации Якобиан принимает нулевое значение, поэтому прохождение по любому из параметров через точку бифуркации становится невозможным.
Метод стрельбы
Суть метода заключается в сведении нелинейной краевой задачи к задаче Коши.
Рассмотрим нелинейную краевую задачу:

| 2.1 |

|
Пусть функции  таковы, что система уравнений:
таковы, что система уравнений:

| 2.2 |

|
однозначно определяет вектор  Тогда задача (2.1) может быть сведена к системе нелинейных уравнений относительно параметров
Тогда задача (2.1) может быть сведена к системе нелинейных уравнений относительно параметров  .
.
Довольно часто грачниное условие в точке 0 имеет вид:

Тогда в качестве целесообразно взять  Таким образом, здесь в качестве искомых параметров выступают неизвестные компоненты решения в точке
Таким образом, здесь в качестве искомых параметров выступают неизвестные компоненты решения в точке  Как правило, тербуемая система нелинейных уравнений не выписывается явно, но можно указать алгоритм вычисления ее правой части.
Как правило, тербуемая система нелинейных уравнений не выписывается явно, но можно указать алгоритм вычисления ее правой части.
При каждых , решая систему (2.2) можно определить вектор  решая задачу Коши при начальном условии
решая задачу Коши при начальном условии  , определяем
, определяем  и затем находим
и затем находим  . Таким образом, решение задачи (2.1) сводится к решению нелинейной системы
. Таким образом, решение задачи (2.1) сводится к решению нелинейной системы

В этой работе в качестве метода решения нелинейной системы выбран метод Ньютона. При использовании метода Ньютона на каждой итерации численно вычисляется матрица производных.
|
|
Глава 3. Анализ результатов
Бифуркация
Рис. 8. Амортизатор в плоскости  , несимметричное сжатие , несимметричное сжатие
|
| Рис. 7. Амортизатор в плоскости , симметричное сжатие
|
равному  (рис. 7–8). На всех приведенных ниже рисунках в качестве боковых пластин проиллюстрированы их срединные линии.
(рис. 7–8). На всех приведенных ниже рисунках в качестве боковых пластин проиллюстрированы их срединные линии.


На рисунке 8 несимметричная деформация реализована следующим путем: по оси к амортизатору приложено усилие  .
.
| P |
 до момента, когда угол между касательной в точке скрепления пластин и верхней пластиной не становится равным нулю. Потом, используя метод деидеализации, изложенный выше, приравнивается к нулю и сжимающая нагрузка убирается до момента, пока амортизатор не вернется в состояние покоя. На всех диаграммах, приведенных ниже, проиллюстрирован процесс возврата амортизатора в исходное положение, то есть, движение по параметру осуществляется справа налево.
до момента, когда угол между касательной в точке скрепления пластин и верхней пластиной не становится равным нулю. Потом, используя метод деидеализации, изложенный выше, приравнивается к нулю и сжимающая нагрузка убирается до момента, пока амортизатор не вернется в состояние покоя. На всех диаграммах, приведенных ниже, проиллюстрирован процесс возврата амортизатора в исходное положение, то есть, движение по параметру осуществляется справа налево.

| Рис. 9. Диаграмма нагрузка-перемещение |
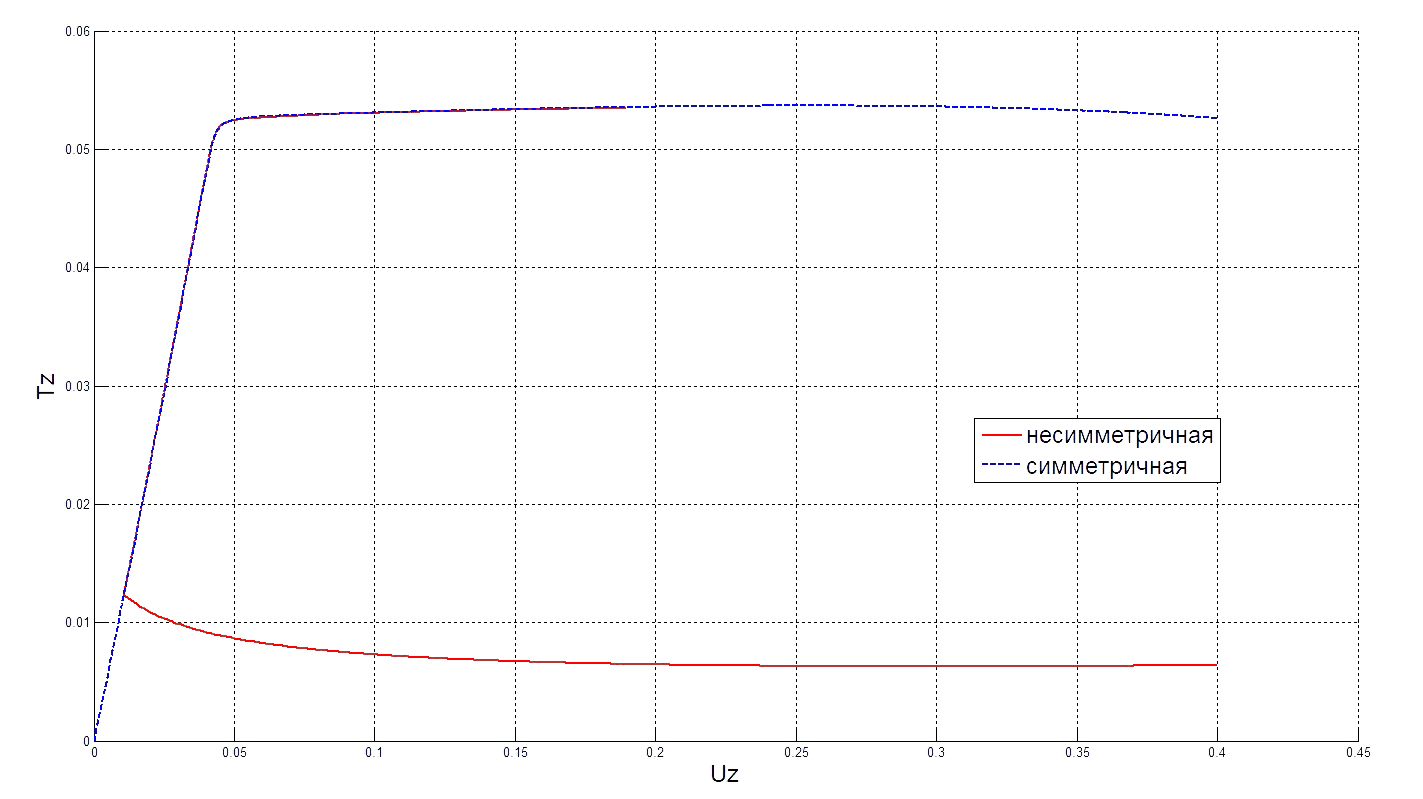
 графики несимметричной и симметричной форм сливаются в один. Стоит подметить, что несимметричный вариант является выгоднее симметричного, потому что для его реализации нужна меньшая вертикальная нагрузка. Рассмотрим окрестность точки ветвления ближе (рис. 10):
графики несимметричной и симметричной форм сливаются в один. Стоит подметить, что несимметричный вариант является выгоднее симметричного, потому что для его реализации нужна меньшая вертикальная нагрузка. Рассмотрим окрестность точки ветвления ближе (рис. 10):

| Рис. 10. Диаграмма нагрузка-перемещение |
| P |
 (рис. 10) наблюдается численный переско
(рис. 10) наблюдается численный переско | Рис. 10. Диаграмма нагрузка-перемещение |
| Рис. 17. Диаграмма нагрузка-перемещение |
 – параметру вертикального нагружения (рис. 11) несимметричная ветвь снова перескакивает на симметричную.
– параметру вертикального нагружения (рис. 11) несимметричная ветвь снова перескакивает на симметричную.
| Рис. 11. Диаграмма нагрузка-перемещение |
| P |
| P |

| Рис. 12. Диаграмма нагрузка-перемещение |
| Рис. 13. Диаграмма нагрузка-перемещение |

 Рассмотрим движение по параметру
Рассмотрим движение по параметру  – параметру угла поворота (рис. 13). Также, на рисунке 13 симметричное решение продолжено по до конца высоты амортизатора для дальнейших исследований.
– параметру угла поворота (рис. 13). Также, на рисунке 13 симметричное решение продолжено по до конца высоты амортизатора для дальнейших исследований.
Рассмотрим окрестность точки соединения графиков ближе (рис. 14):
|
|

| Рис. 14. Диаграмма нагрузка-перемещение |
| Рис. 15. Диаграмма зависимости от трех параметров продолжения решения |
| P |
| P |
наблюдается остановка в окрестности этой точки и «разворот» назад по той же кривой в этой плоскости (рис. 14). То есть, следует рассмотреть трехмерный график зависимости всех от трех параметров (рис. 15).

Из рисунков 9, 11 и 13 видно, что при движении по любому параметру не осуществляется плавного перехода на симметричное решение, точка  является предельной для всех параметров. Также, если в окрестности этой точки пройти по симметричному варианту с мелким шагом, то наблюдается сильно ухудшение сходимости вплоть до остановки алгоритма. Следовательно, эта точка – точка бифуркации, то есть точка разветвления решения. В ней при нагружении будет происходить переход симметричного варианта на несимметричный.
является предельной для всех параметров. Также, если в окрестности этой точки пройти по симметричному варианту с мелким шагом, то наблюдается сильно ухудшение сходимости вплоть до остановки алгоритма. Следовательно, эта точка – точка бифуркации, то есть точка разветвления решения. В ней при нагружении будет происходить переход симметричного варианта на несимметричный.
| Рис. 16. Бифуркационная диаграмма нагрузка-поворот |
| P |
 (рис. 16).
(рис. 16).


 Зафиксируем
Зафиксируем  и в точках пересечения с диаграммой (рис. 16) построим формы амортизатора (рис. 17–18).
и в точках пересечения с диаграммой (рис. 16) построим формы амортизатора (рис. 17–18).
| Точка С 1) |
| Точка С 2) |
| Рис. 17. Формы симметричного варианта |


| Точка Н 1) |
| Точка Н 2) |
| Рис. 18. Формы несимметричного варианта |
 . То есть, при
. То есть, при  будет реализовываться симметричный вариант.
будет реализовываться симметричный вариант.
Изолированное решение
Помимо бифуркации, методом деидеализациии было найдено изолированное решение.
Рис. 19. Амортизатор в плоскости  , симметричное сжатие , симметричное сжатие
|

| Рис. 20. Амортизатор в плоскости , несимметричное сжатие
|
, равному  (рис. 19–20).
(рис. 19–20).


| Рис. 21. Диаграмма нагрузка-перемещение |
| P |
, обозначим его  . Далее все происходит аналогично главе 3.2.
. Далее все происходит аналогично главе 3.2.
Из рисунка 21 видно, что в точке  графики нагрузки-перемещения для симметричной и для несимметричной форм сливаются в один. Рассмотрим окрестность этой точки ближе (рис. 22).
графики нагрузки-перемещения для симметричной и для несимметричной форм сливаются в один. Рассмотрим окрестность этой точки ближе (рис. 22).

| Рис. 22. Диаграмма нагрузка-перемещение |
| P |
равен  . Видно, что нагрузка убывает, потом снова возрастает и на промежутке
. Видно, что нагрузка убывает, потом снова возрастает и на промежутке  осуществляется численный перескок с несимметричной ветви на симметричную. В этом промежутке сходимость ухудшается, поэтому требуется поменять параметр продолжения решения.
осуществляется численный перескок с несимметричной ветви на симметричную. В этом промежутке сходимость ухудшается, поэтому требуется поменять параметр продолжения решения.
Если в окрестности точки перескока пройти по параметру – параметру угла поворота, то получается изолированное решение, изображенное на рисунке 23. Реализовываться этот вариант, скорее всего, не будет, тем более, симметричный вариант в этом случае выгоднее несимметричного по нагрузке.

| Рис. 23. Диаграмма нагрузка-перемещение |
| P |
Выводы
Составлен алгоритм решения нелинейной краевой задачи методом стрельбы в сочетании с методом продолжения по параметру. Написана программа, реализующая этот алгоритм. Отладка программы проводилась на примерах, известных из литературы.
Была рассмотрена задача деформации мостичного амортизатора при условии шарнирного опирания у верхнего основания и заделки у нижнего основания. Также, предполагалось, что основания при сжатии остаются параллельными, но верхнее основание может перемещаться по горизонтали. Задача в такой постановке другими авторами не рассматривалась.
Найдены бифуркационные ветви перехода от симметричного деформирования к несимметричному. Показано, при каком значении начального угла будет возможна бифуркация при расчетных параметрах.
В развитие работы можно рассмотреть другие толщины резиновых пластин; поставить условие возможности поворота верхнего основания при шарнирном опирании; рассмотреть криволинейные формы резиновых пластин.
Заключение
В ходе выполнения была написана программа, реализующая решение поставленной задачи. Найдены ветви потери устойчивости амортизатора и диапазон угла, при котором она реализуется для заданных расчетных параметров.
Список литературы
1. Бочкарева Н.Л., Колпак Е.П. Об устойчивости арочного амортизатора // Вестник СПбГУ, 1993. Сер. 1, вып. 4. С. 49–53.
2. Колпак Е.П. Устойчивость мостичного амортизатора из резиноподбного материала // Теория и методы расчета нелинейных пластин и оболочек, 1981. С.: Изд-во Саратовского ун-та, 1981. С. 43–45.
3. Черных К.Ф. Нелинейная теория упругости в машиностроительных расчетах. Л.: Машиностроение, 1986. 336 с.
4. Кабриц С.А., Михайловский Е.И., Товстик П.Е., Черных К.Ф., Шамина В.А. Общая нелинейная теория упругих оболочек. СПб.: СПбГУ, 2002. 386 с.
5. Kabrits S.A., Kolpak E.P. Finding bifurcation branches in nonlinear problems of statics of shells numerically, 2015 International conference «Stability and Control processes» in Memory of Zubov V.I., 2015. P. 389–391.
6. Kabrits S.A., Kolpak E.P. Numerical Study of Convergence of Nonlinear Models of the Theory of Shells with Thickness Decrease, AIP Conference Proceedings, 2016. Vol. 1738, №160006.
7. Бахвалов Н.С. Численные методы (анализ, алгебра, обыкновенные дифференциальные уравнения). М.: Наука, 1975. 631 с.
8. Кабриц С.А., Терентьев В.Ф. О численном построении диаграмм нагрузка-перемещение в одномерных нелинейных задачах теории стержней и оболочек // Актуальные проблемы нелинейной механики сплошных сред, 1977. Вып. 1. С. 155–171.
9. Алфутов Н.А. Основы расчета на устойчивость упругих систем. М.: Машиностроение, 1978. 312 с.
10. Пановко Я.Г., Губанова И.И. Устойчивость и колебания упругих систем. М.: Наука, 1987. 352 с.
11. Белкин А.Е., Семенов В.В., Семенов В.К. Численный анализ больших плоский деформаций арочного амортизатора // Вестник МГТУ им. Н.Э. Баумана, 2011. №2. С. 55–64.
12. Белкин А.Е., Хоминич Д.С. Расчет больших деформаций арочного амортизатора с учетом объемной сжимаемости резины // Вестник МГТУ им. Н.Э. Баумана, 2012. №2. С. 3–11.
Приложение
Краткое описание всех функций:
main – скрипт, запускающий работу программы;
BALKAM – функция, осуществляющая продолжения по параметру (сжатие амортизатора, несимметричный случай);
BALKAM1 – функция, осуществляющая продолжения по параметру (сжатие амортизатора, несимметричный случай);
PSI1 / PSI2 – функция от вектора начального приближения, задающая начальные условия для задачи Коши для правой / левой половинки (1.3);
PSI / PSITh – функция от вектора начального приближения, задающая граничные условия на верхнем основании при параметре продолжения решения вертикального перемещения / угла поворота (1.3);
FRESHE – функция от функции PSI1 / PSI2 и вектора начального приближения для вычисления невязки и матрицы Якоби в методе Ньютона;
PSI_PRINT1 / PSI_PRINT2 – функция от вектора деформации, осуществляющая построение формы правой / левой половинки амортизатора;
Runge – модуль метода Рунге – Кутты – Мерсона для системы дифференциальных уравнений (1.1);
solve_lambda – функция, вычисляющая методом касательных кратность удлинения срединной линии резиновых пластин амортизатора;
RVO – функция задания начальной геометрии и констант материала;
kgx – функция от вектора начального приближения, вычисляющая правые части системы дифференциальных уравнений (1.1).
function [g] = kgx(s,y)
%вычисление правых частей системы дифференциальных уравнений
% y[1]=v y[2]=u y[3]=Theta y[4]=M y[5]=Tx y[6]=Tz L1=lambda1
global lg
lg = 1;
[ R0,Z0,F0,K0,h0,mu,n,beta] = RVO(s);
fi=y(3)+F0; g=zeros(6,1);
Tn=y(5).*sin(fi)+y(6).*cos(fi);
Ts=y(5).*cos(fi)-y(6).*sin(fi);
lambda10=1;
lambda2=lg;
alfa=mu.*h0./n.*((1+beta)+(1-beta).*lambda2.^n);
L1=solve_lambda(Ts,lambda10,alfa,n,lambda2);
lambda3=1./(L1.*lambda2);
g(1)= L1.*cos(fi)-cos(F0);
g(2)=-L1.*sin(fi)+sin(F0);
b=(L1*lambda2)^n;
a=1/(L1.^2.*lambda2).*((1+beta)./b+(1-beta).*b);
kappa_s=6.*y(4)./(mu.*h0.^3)./a;
g(3)=L1.^2.*lambda2.*(kappa_s+K0)-K0;
g(4)=L1*Tn;
g(5)=0;
g(6)=0;
end
function [R0,Z0,F0,K0,h0,mu,n,beta] = RVO(s)
%начальная геометрия и константы материала
global ab
F0=85/180*pi;
R1=0.5; R0=R1+s.*cos(F0);
H=ab*sin(F0); Z0=H-s.*sin(F0);
K0=0;
h0=1/7;
mu=1;
n=2;
beta=1;
end
function [L1] = solve_lambda(T,L10,alfa,n,L2)
%вычисление кратности удлинения срединной линии резиновых пластин методом касательных
global lg
L1=L10; eps=1; b=L2.^(-n);
while eps>1E-10
a=L1.^(n-1); c=b./(a*L1*L1);
f=alfa.*(a-c)-T;
df=alfa.*((n-1)*a+(n+1).*c)/L1;
L11=L1-f/df;
eps=abs(L11-L1);
L1=L11;
lg = L11;
end
end
function [ Y ] = Runge(FT,TT0,TTK,TTH,EET,XX)
%Метод Рунге - Кутты - Мерсона с автоматическим шагом
T=TT0; C=abs(TTK-TT0)/3; NN=size(XX,1);
if C<=10^(-8)*abs(TTH)
return
end;
TTH=abs(TTH).*sign(TTK-TT0);
ib=1;
while (ib==1)
if (T+TTH-TTK)*sign(TTH)>0
TTH=TTK-T; ib=0;
end;
F0=FT(T,XX);
Y1=XX+F0.*TTH./3;
F1=FT(T+TTH./3,Y1); Y1=XX+(F0+F1).*TTH./6;
F2=FT(T+TTH/3,Y1); Y1=XX+(F0+3.*F2).*TTH./8;
F3=FT(T+TTH/2,Y1); Y1=XX+(F0-3.*F2+4.*F3).*TTH./2;
F1=FT(T+TTH,Y1);
Y1=abs(F0-4.5.*F2+4.*F3-0.5.*F1).*C;
II=0; JJ=0;
for I=1:NN
if EET(I)~=0
II=II+1;
if Y1(I) >= EET(I)*5
TTH=TTH./2;
continue;
else
if Y1(I)<= EET(I)/32
JJ=JJ+1;
end
end
end
end
T=T+TTH;
XX=XX+(F0+4.*F3+F1).*TTH./6;
if (II~=0) && (II==JJ)
TTH=2.*TTH;
end
if abs(T-TTK)>1.E-6.*C
continue
end
end
Y=XX;
end
function [Y] = PSI_PRINT1(X)
%построение формы правой пластинки амортизатора
global ab shag dlt ln
Z=zeros(6,1);
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(0);
Z(1)=0; %начальные условия
Z(2)=0;
Z(3)=0;
Z(4)=X(1);
Z(5)=X(2);
Z(6)=X(3);
Ep=zeros(6,1);
m=50;
YY=zeros(m,6);
x=linspace(ab,0,m);
for i=1:m-1
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(x(i));
if i==1
YY(i,1)=R0+Z(1);
YY(i,2)=Z0+Z(2);
end
ZZ=Runge(@kgx,x(i),x(i+1),shag,Ep,Z);
Z=ZZ;
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(x(i+1));
YY(i+1,1)=R0+Z(1);
YY(i+1,2)=Z0+Z(2);
end
ln(1) = R0+Z(1);
ln(2) = Z0+Z(2);
hold on; grid on;
if (dlt<0)
subplot(2,2,1);
plot(YY(:,1),YY(:,2),'LineWidth',4);
else
subplot(2,2,2);
plot(YY(:,1),YY(:,2));
end
hold on; grid on;
end
function [Y] = PSI_PRINT2(X)
%построение формы левой пластинки амортизатора
global ab shag dlt ln
Z=zeros(6,1);
[ R0,Z0,F0,K0,h0,mu,n,beta] = RVO(0);
Z(1)=0; %начальные условия
Z(2)=0;
Z(3)=0;
Z(4)=X(4);
Z(5)=X(5);
Z(6)=X(6);
Ep=zeros(6,1);
m=50;
YY=zeros(m,6);
DD1=zeros(m,6);
DD2=zeros(m,6);
YY1=zeros(m,6);
x=linspace(ab,0,m);
for i=1:m-1
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(x(i));
if i==1
YY(i,1)=-R0-Z(1);
YY(i,2)=Z0+Z(2);
end
ZZ=Runge(@kgx,x(i),x(i+1),shag,Ep,Z);
Z=ZZ;
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(x(i+1));
YY(i+1,1)=-R0-Z(1);
YY(i+1,2)=Z0+Z(2);
end
ln(3) = -R0-Z(1);
ln(4) = Z0+Z(2);
hold on; grid on;
if (dlt<0)
subplot(2,2,1);
plot(YY(:,1),YY(:,2),'LineWidth',4);
else
subplot(2,2,2);
plot(YY(:,1),YY(:,2));
end
hold on; grid on;
end
function [Y, DF] = FRESHE(PSI,X);
%вычисление Y=F(x) (невязка) и DF (матрица якоби dPSI/dx)
nfresh=size(X,1);
Y=PSI(X); %вектор деформации
for k=1:nfresh
A=X(k); P=A*1.E-4;
if abs(P)<1.E-8
P=1.E-8;
end
X(k)=A+P;
Z=PSI(X);
X(k)=A;
for j=1:nfresh
DF(j,k)=(Z(j)-Y(j))./P;
end
end
end
function [ZZ] = PSI1(X)
%начальные условия для решения задачи коши правой половинки
global ab shag
Z=zeros(6,1);
Z(1)=0;
Z(2)=0;
Z(3)=0;
Z(4)=X(1);
Z(5)=X(2);
Z(6)=X(3);
Ep=zeros(6,1);
ZZ=Runge(@kgx,ab,0,shag,Ep,Z); %решение задачи коши
end
function [ZZ] = PSI2(X)
%начальные условия для решения задачи коши левой половинки
global ab shag
Z=zeros(6,1);
Z(1)=0;
Z(2)=0;
Z(3)=0;
Z(4)=X(4);
Z(5)=X(5);
Z(6)=X(6);
Ep=zeros(6,1);
ZZ=Runge(@kgx,ab,0,shag,Ep,Z); %решение задачи коши
end
function [Y] = PSI(X)
% граничные условия на верхнем основании при параметре продолжения вертикального перемещения
global delta ab shag deltax
Z1 = PSI1(X); %правая половинка
Z2 = PSI2(X); % левая половинка
Y(1) = Z1(4); %граничные условия
Y(2) = Z2(4);
Y(3) = Z1(1) + Z2(1);
Y(4) = Z1(2) - Z2(2);
Y(5) = Z2(5) - Z1(5) + deltax;
Y(6) = Z1(2) - delta;
end
function [Y] = PSITh(X)
% граничные условия на верхнем основании при параметре продолжения угла поворота правой пластинке
global tzz
Z1 = PSI1(X);
Z2 = PSI2(X);
Y(1) = Z1(4); Y(2) = Z2(4);
Y(3) = Z1(1) + Z2(1);
Y(4) = Z1(2) - Z2(2);
Y(5) = Z2(5) - Z1(5);
Y(6) = Z2(3) - tzz;
end
function [] = BALKAM
%функция, осуществляющая продолжения по параметру (сжатие амортизатора, несимметричный случай)
global q1 obrshag mas lnln p1 tzz distance TzL TzR grdlt delta ab dlt shag deltax ln t ogr
ln = zeros(4);
lnln = [];
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(0);
nfresh=3; %размерность
ab=1; %длина боковых пластин
shag=0.05; %шаг интегрирования
kol = 6; %размерность вектора системы дифференциальных уравнений
X=zeros(kol,1);
Xp=zeros(kol,1);
X0=zeros(kol,1);
X1=zeros(kol,1);
q1 = 1;
mas = []; %массив данных
TzL = [];
TzR = [];
Tz = [];
grdlt = []; %вектор параметров
rr = 0;
er = 0;
ch = 0; %счетчик
while (abs(delta)<(ab*sin(F0)-abs(dlt))) && (ogr-abs(dlt)>abs(delta))&& (q1~=0); %цикл сжатия
iter=0; %счетчик
s=1; %параметр сходимости
Xp = X;
rrr = 0;
if (er~=1)
delta = delta+dlt; %продолжение по параметру
end
if (delta<distance) %проверка, дошел ли процесс до заданного параметра и последующий разворот назад
deltax = 0;
dlt = -dlt/obrshag;
rrr = 1;
rr = 1;
end;
if (rr == 1) && (delta>-p1-0.0000001) && (delta<-p1+0.0000001) %условие смена параметра
er = 1;
end;
if (delta>-p1-0.0000001) && (er == 1) && (delta<-p1+0.0000001) %смена параметра
ll = length(Tz);
thxR = (Tz(ll)-Tz(ll-1))/100;
thxRR = thxR;
thetaxR = Tz(ll);
end;
if (er == 1) && (rr == 1) && (delta>-0.007) %обратная смена параметра при успешном проходе
er = 0;
end;
if (delta>-dlt+dlt/10) && (dlt>0) %условие остановки алгоритма
q1 = 0;
end;
if (er == 1) && (delta<-0.007) %экстраполяция параметра
tzz = thetaxR + thxR;
thxR = thxR +thxRR;
end;
while s>0.0001 %цикл сжатия
iter=iter+1;
if (er == 1) && (delta<-0.007) %определение параметра
if s>0.1 %условие сходимости
[Y,DF]=FRESHE(@PSITh,X); %вычисление правых частей
else [Y]=PSITh(X); %вычисление правых частей
end
else
if s>0.1
[Y,DF]=FRESHE(@PSI,X);
else [Y]=PSI(X);
end
end
WW=DF\Y'; %решение системы нелинейных уравнений
X=X-WW; %вектор деформации
s=0;
for i=1:nfresh %сходимость
s=s+abs(WW(i))./(abs(X(i))+1e-10);
end
end
if (er == 1) && (delta<-0.007) %вычисление параметра вертикального смещения при движении по другому
zzz = PSI2(X);
delta = zzz(2);
end;
if (dlt>0)
zzz = PSI2(X); %вектор левой половинки
z11 = PSI1(X); %вектор правой половинки
z22 = PSI2(X);
uzz = z11(6) + z22(6); %вертикальная суммарная нагрузка
mas = [mas;[-delta,iter,uzz,z11',z22',X']]; %вектор данных
TzR=[TzR,X(3)]; %вектор нагрузки правой половинки
TzL=[TzL,X(6)]; %вектор нагрузки левой половинки
Tz = [Tz,zzz(3)]; %вектор параметра угла поворота
grdlt = [grdlt,-delta]; %вектор параметра вертикального смещения
end
t = 1;
PSI_PRINT1(X); %построение формы правой половинки
PSI_PRINT2(X); %построение формы левой половинки
hold on; grid on;
if (dlt<0) %постоение верхней пластины
subplot(2,2,1)
plot([ln(1),ln(3)],[ln(2),ln(4)],'r');
else
lnln = [lnln;[ln(1),ln(3),ln(2),ln(4)]];
end
hold on; grid on;
[delta,iter]
X1 = X;
X = (X-X0).*(-2*dlt)./(-dlt+(1e-20)) + X0; %экстраполяция начального приближения методом касательных
X0 = X1;
ch = ch + 1;
end
hold on; grid on;
subplot(2,2,2);
for i=1:length(lnln)
plot([lnln(i,1),lnln(i,2)],[lnln(i,3),lnln(i,4)],'r'); %постоение верхней пластины
end;
hold on; grid on;
end
function [] = BALKAM1
%функция, осуществляющая продолжения по параметру (сжатие амортизатора, симметричный случай)
global q1 ii mas1 razb ThetaS distance TzL1 TzR1 grdlt1 delta ab dlt shag ln t ogr
ln = zeros(4);
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(0);
nfresh=3;
ab=1;
shag=0.05;
kol = 6;
X=zeros(kol,1);
Xp=zeros(kol,1);
X0=zeros(kol,1);
X1=zeros(kol,1);
q1 = 1;
mas1 = [];
TzL1 = [];
TzR1 = [];
ThetaS = [];
grdlt1 = [];
ii = 1;
while (abs(delta)<(ab*sin(F0)-abs(dlt))) && (ogr-abs(dlt)>abs(delta)) && (q1~=0) && (distance<delta)
iter=0; s=1;
Xp = X;
rrr = 0;
delta = delta+dlt;
if (delta>-0.0080001) && (delta<-0.0079999)
dlt = dlt/razb;
end;
if (delta>-0.01200001) && (delta<-0.01199999)
dlt = dlt*razb;
end;
while s>0.0001
iter=iter+1;
if s>0.1
[Y,DF]=FRESHE(@PSI,X);
else [Y]=PSI(X);
end
WW=DF\Y';
X=X-WW;
s=0;
for i=1:nfresh
s=s+abs(WW(i))./(abs(X(i))+1e-10);
end
end
TzR1=[TzR1,X(3)];
TzL1=[TzL1,X(6)];
grdlt1 = [grdlt1,-delta];
ThetaS = [ThetaS,X(1)];
t = 1;
if (X(3)+X(6) > 0.0099) && (X(3)+X(6) < 0.011)
PSI_PRINT1(X);
PSI_PRINT2(X);
end;
[delta,iter]
z11 = PSI1(X);
z22 = PSI2(X);
uzz = z11(6) + z22(6);
mas1 = [mas1;[-delta,iter,uzz,z22',X']];
X1 = X;
X = (X-X0).*(-2*dlt)./(-dlt+(1e-20)) + X0;
X0 = X1;
end
%main
%скрипт, запускающий работу программы
global delta distance1 razb p1 ln mas mas1 lnln ii arr1 arr ThetaS obrshag distance grdlt TzL TzR grdlt1 TzL1 TzR1 ab ThetaL ThetaR dlt deltax ogr
hold off;
[R0,Z0,F0,K0,h0,mu,n,beta] = RVO(0);
dlt = -0.001; %задание шага параметра продолжения
deltax = 0.001; %задание неидеальности
p1 = 0.011; %точка при достижении которой осуществляется смена параметра
obrshag = 1; %разбиение шага при движении обратно
distance = -0.4; %точка предела сжатия
razb = 10; %разбиение шага при движении по другому параметру
delta = -dlt; %начальное значение параметра (обнулится при заходе в цикл)
ogr = ab*sin(F0)+3*dlt; %ограничение для того, чтобы верхняя пластина не перерезала нижнюю
BALKAM; %основная функция несимметричного сжатия
hold on; grid on;
Tt = TzL + TzR; %вектор суммарной вертикальной нагрузки
% yy = [];
% yy=[yy;[grdlt;Tt]];
% hold on; grid on;
subplot(2,2,4); %диаграмма нагрузка-перемещение для правой и левой половинок по отдельности
hold on; grid on;
plot(grdlt, TzL,'r');
plot(grdlt, TzR,'b');
legend('левая','правая',0);
plot(grdlt, TzL,'r*',grdlt, TzR,'*');
ylabel('Tz');
xlabel('delta');
hold on; grid on;
deltax = 0; %обнуление неидеальности
distance = -ogr;
dlt = -0.001;
delta = -dlt;
BALKAM1; %основная функция симметричного сжатия
hold on; grid on; %построение диаграммы нагрузка-перемещения для несиммеричного варианта
subplot(2,2,3);
Tt = TzL + TzR;
plot(grdlt, Tt,'r','LineWidth',2);
%plot(grdlt, Tt,'r*');
ylabel('Tz');
xlabel('Uz');
%yy = [];
%yy=[yy;[grdlt;Tt]];
hold on; grid on;
Tt = TzL1 + TzR1;
plot(grdlt1, Tt,'--b','LineWidth',2); %построение диаграммы нагрузка-перемещение для симметричного варианта
legend('несимметричная','симметричная',0);
%plot(grdlt, Tt,'b*');
hold on; grid on;
Кафедра вычислительных методов механики деформируемого тела
Горх Эдуард Владимирович
|
|
|

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!