Основной частью генератора является модуль прямого цифрового синтеза. В данной работе используется готовый модуль DDS на базе микросхемы AD9833. AD9833 – это микросхема с высокой степенью интеграции. При работе от опорного тактового сигнала AD9833 обеспечивает аналоговый выходной синусоидальный сигнал с программируемой частотой и фазой. Этот сигнал может быть преобразован внутри компонента в прямоугольную волну. Микросхема имеет 28-разрядные регистры частоты, что дает разрешение установки выходной частоты 0,1 Гц при опорной тактовой частоте 25 МГц. Аналогичным образом, при тактовой частоте 1 МГц AD9833 может быть настроен на разрешение 0,004 Гц Архитектура AD9833 позволяет выводить сигналы с частотой до половины опорной частоты (до 40 МГц).
Основные характеристики микросхемы AD9833:
- Цифровое программирование частоты и фазы;
- Потребляемая мощность 12.65 мВт при напряжении 3 В;
- Диапазон выходных частот от 0 МГц до 12 МГц;
- Разрешение 28 бит (0.1 Гц при частоте опорного сигнала 25 МГц);
- Трехпроводной интерфейс SPI;
- Синусоидальные, треугольные и прямоугольные выходные колебания;
- Напряжение питания от 2.3 В до 5.5 В;
- Расширенный температурный диапазон: от –40°C до +105°C;
- Функция пониженного энергопотребления;
В данной работе используется готовый модуль на базе микросхемы AD9833. Модуль имеет все необходимые разводки для работы микросхемы, включая кварцевый резонатор опорной тактовой частоты. Внешний вид и название выводов модуля изображено на рис.2 Назначение выводов представлено в таблице 1.
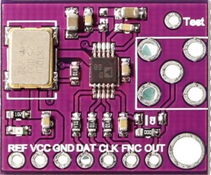
Рис.2. Назначение выводовDDS модуля AD9833
Табл. 1.
Назначение выводов модуля DDS
| Вывод модуля
| Назначение
|
| VCC
| Плюс питания для цифровых и аналоговых цепей генератора
|
| DGND
| Земля
|
| SDATA
| Вход данных интерфейса SPI. Передача осуществляется 16-битными словами.
|
| SCLK
| Вход тактового сигнала SPI. Используется второй режим работы: (CPOL = 1, CPHA = 0).
|
| FSYNC
| Frequency Update. По переднему фронту импульса на данном входе AD9833 обновляет частоту (или фазу) в соответствии с полученной 40-битной последовательностью
|
| OUT
| Выход генератора
|
| REF
| Тактовый выход 25MHz
|
Для установки частоты на AD9833 необходимо применять не значение этой частоты, а специальное контрольное число, рассчитываемое по следующей формуле:
 (1)
(1)
где  - управляющее число;
- управляющее число;  – частота, какую хотим установить;
– частота, какую хотим установить;  – тактовая частота 25МГц.
– тактовая частота 25МГц.
Для удобства настройки значение текущей частоты выходного сигнала и текущего шага изменения частоты должны отображаться на символьном индикаторе. В качестве такого дисплея используется жидкокристаллический дисплей 16х4 (LCD) (четыре строки по 16 символов) с контроллером HD44780. HD44780 — контроллер монохромных жидкокристаллических знакосинтезирующих дисплеев с 4-битным или 8-битным параллельным интерфейсом (в данной работе для экономии свободных выводов микроконтроллера используется 4-битный интерфейс). Каждое знакоместо на дисплее представляет собой матрицу размером 5x8 точек. Также можно загрузить несколько пользовательских символов в первые 8 ячеек CGRAM. Как правило, знакогенератор содержит символы латинского алфавита и одного из национальных алфавитов. Пример таблицы символов приведен в Приложении 3.Назначение выводов LCD модуля представлено в таблице3. Управляющие последовательности представлены в спецификации [10] и подробно рассмотрены в литературе [8].
Управление модулем DDS AD9833 и ЖК-дисплеем, а также установка нужной частоты осуществляется с помощью микроконтроллера.Подобный метод управления подробно представлен в научной литературе [1,5,7,8,9].
Согласно техническому заданию в данной работе должен использоваться восьмиразрядный микроконтроллер с тактовой частотой от 8 до 16 МГц, с памятью программ не менее 16 кБайт и с напряжением питания. Микроконтроллер ATmega328P идеально соответствует этим требованиям.
Табл.2.
Назначение выводов символьного LCD модуля
| Название вывода
|
Функциональное назначение
|
| VCC
| Напряжение питания
|
| К
| Катод светодиода
|
| А
| Анод светодиода
|
| RS
| Выбор записи команды/данные
|
| V0
| Напряжение управления контрастностью
|
| GND
| Земля
|
| DB0
| Младший бит для 8-битного интерфейса
| Шина данных
|
| DB1
|
|
| DB2
|
| DB3
|
| DB4
| Младший бит для 4-битного интерфейса
|
| DB5
|
|
| DB6
|
| DB7
| Старший бит для 8 и 4-битного интерфейса
|
| R/W
| Выбор направления передачи данных запись/чтение
|
| E
| Вход тактовых импульсов (по спаду)
|
ATmega328P– это 8-ми разрядный CMOS микроконтроллер семейства AVR. Он обладает следующими характеристиками:
- 32 кбайт Flash (память программ);
- 2 кбайт ОЗУ;
- 1 кбайт EEPROM (постоянная память данных);
- Два 8-битных таймера/счетчика с модулями сравнения и делителями частоты;
- 16-битный таймер/счетчик с модулем сравнения и делителем частоты, а также с режимом записи;
- 6-канальный ЦАП;
- Программируемый последовательный порт USART;
- Последовательный интерфейс SPI;
- Интерфейс I2C;
- Программируемый сторожевой таймер с отдельным внутренним генератором;
- Внутренняя схема сравнения напряжений;
- Блок обработки прерываний и пробуждения при изменении напряжений на выводах микроконтроллера;
- Напряжения питания и скорость процессора:
- 1.8 — 5.5 В при частоте до 4 МГц
- 2.7 — 5.5 В при частоте до 10 МГц
- 4.5 — 5.5 В при частоте до 20 МГц
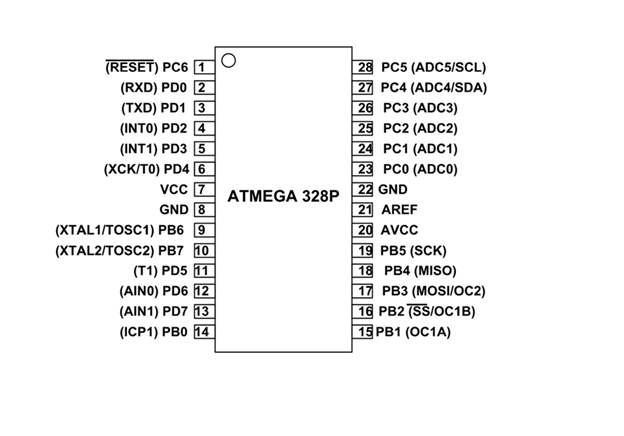
Рис.3. Назначение выводов ATmega328P.
Назначение выводов ATmega328P показано на рисунке 3. Выбор именно этого микроконтроллера обусловлен большим объемом Flash-памяти, а также доступностью и распространенностью данной модели (в том числе в популярной платформе Arduino). В данной работе используется тактовая частота 8 МГц.
Принципиальная схема
Выходы микроконтроллера распределены следующим образом: порт C, за исключением выхода PC6, предназначен для управления дисплеем; весь портыPB0-PB1 предназначены для параллельной передачи команд на AD9833; порт PD0-PD1 также предназначены для AD9833, а выводы PD2-PD5 предназначены для приема управляющего сигнала от кнопок. Назначение контактов ATmega328P показано на рисунке 4. Контакты PC0-PC5, PB0-PB1 и PD0-PD1 настроены как выходы, контакты PD2-PD5 настроены как входы.
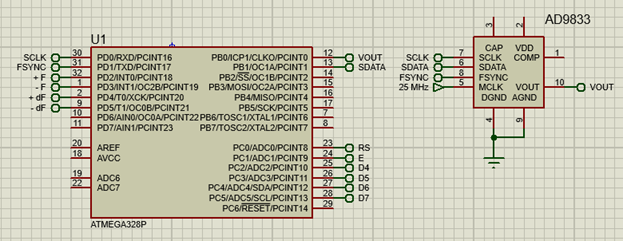
Рис.4. Распределение выводов микроконтроллера
Блок перестройки частоты состоит из четырех кнопок, подключенных к выводам PD2-PD5 микроконтроллера. Схема подключения представлена на рис. 5
Кнопка срабатывает при подаче на вход микроконтроллера сигнала низкого уровня (логического нуля). Диоды используются для разделения кнопок питания. Последовательность выводов и назначения кнопок, следующая: PD2 - добавление шага к текущей частоте, PD3 - вычитание шага из текущей частоты, PD4 - увеличение шага в 10 раз, PD5 - уменьшение шага в 10 раз.

Рис.5. Схема подключения управляющих кнопок
Модуль DDS AD9833 выдает аналоговый синусоидальный сигнал, сдвинутый вверх на 0,65 В и с фиксированной амплитудой 1 В. Из него необходимо вычесть постоянную составляющую, а полученный сигнал усилить, а коэффициент усиления должен регулироваться. За это отвечает блок управления выходом. Его схема показана на рис.6.
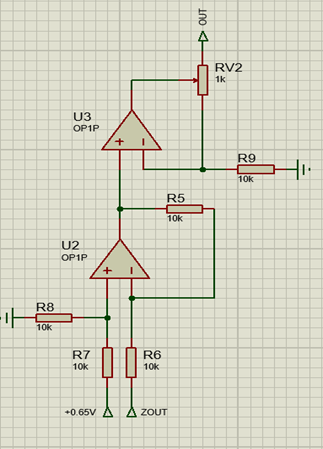
Рис.6. Блок регулировки выходного сигнала
Блок состоит из двух схем операционного усилителя: дифференциального усилителя и неинвертирующего усилителя. Дифференциальный усилитель вычитает постоянную составляющую из сигнала, а неинвертирующий усилитель усиливает ее. В этом случае коэффициент усиления рассчитывается по формуле (2), а благодаря переменному резистору мы можем регулировать этот коэффициент.
 (2)
(2)
Ко всем блокам генератора необходимо подавать питание. По техническому заданию оно должно быть 5 В. Также для работы ОУ требуется двухполярное питание. Блок питания отвечает за преобразование сетевого напряжения в постоянное требуемой величины. Его схема представлена на рис.7.

Рис.7. Схема блока питания
Напряжение сети 220В снижается с помощью понижающих трансформаторов. Далее идет диодный мост. Он используется для преобразования синусоидального переменного тока в пульсирующий. Кроме того, этот пульсирующий ток окончательно выпрямляется с помощью конденсаторов.
Управляющая программа
Программа микроконтроллера написана в среде разработки CodeVisionAVR. Полный текст программы находится в Приложении 1. После запуска генератора задаются начальные значения частоты и шага настройки, их значения отображаются на экране. Далее следует бесконечный цикл, в котором поочередно контролируется нажатие кнопок регулировки частоты. Если кнопка нажата, частота или шаг изменятся соответствующим образом, и их обновленные значения будут отображаться на экране.








