

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Автоматическое регулирование напряжения (АРН )- процесс поддержания напряжений в узловых точках электрической системы в заданных пределах, осуществляемый для обеспечения технически допустимых условий работы потребителей электрической энергии и собственно системы, а также для повышения экономичности их работы. У большинства потребителей электроэнергии допускаются длительные отклонения напряжения от номинального не более чем на ±5%. Превышение номинального напряжения приводит к сокращению срока службы потребителей электроэнергии, уменьшение — снижает производительность и экономичность работы потребителей, пропускную способность линий электропередачи, может нарушить устойчивость работы синхронных машин и асинхронных двигателей
АРН на электростанциях осуществляется регулированием возбуждения синхронных генераторов. На подстанциях АРН осуществляется регулированием возбуждения синхронных компенсаторов, если они установлены на этих подстанциях, или автоматическим изменением под нагрузкой коэффициента трансформации трансформаторов, а также регулированием мощности батарей статических конденсаторов. У потребителей электроэнергии АРН осуществляется регулированием возбуждения мощных синхронных двигателей и регулированием мощности батарей статических конденсаторов..
Принцип работ. Получение дифференциальных уравнений ее элементов и их передаточных функций. Определение общего и граничного коэффициентов усиления системы. Синтез последовательного корректирующего устройства.
46 Системы автоматического регулирования частоты и активной мощности (АРЧМ) предназначены для:
поддержания частоты в энергообъединениях и изолированных энергосистемах в нормальных режимах согласно требованиям ГОСТ на качество электрической энергии;
|
|
регулирования обменных мощностей энергообъединений и ограничения перетоков мощности по контролируемым внешним и внутренним связям энергообъединений и энергосистем;
распределения мощности (в том числе экономичного) между объектами управления на всех уровнях диспетчерского управления (между объединенными энергосистемами в "ЕЭС России", энергосистемами в ОЭС, электростанциями в энергосистемах и агрегатами или энергоблоками в пределах электростанций).
Системы АРЧМ должны обеспечивать (при наличии необходимого регулировочного диапазона) на управляемых электростанциях поддержание среднего отклонения частоты от заданного значения в пределах ±0,1 Гц в десятиминутных интервалах и ограничение перетока мощности по контролируемым связям с подавлением не менее чем на 70% амплитуды колебаний перетока мощности с периодом 2 мин и более.
В систему АРЧМ должны входить:
устройства автоматического регулирования частоты, обменной мощности и ограничения перетоков на диспетчерских пунктах "ЕЭС России" и ОЭС;
устройства распределения управляющих воздействий от вышестоящих систем АРЧМ между управляемым электростанциями и устройства ограничения перетоков по контролируемым внутренним связям на диспетчерских пунктах энергосистем;
устройства управления активной мощностью на электростанциях, привлекаемых к участию в автоматическом управлении мощностью;
датчики перетоков активной мощности и средства телемеханики.
Устройства АРЧМ на диспетчерских пунктах должны обеспечивать выявление отклонений фактического режима работы от заданного, формирование и передачу управляющих воздействий для диспетчерских пунктов нижнего уровня управления и для электростанций, привлекаемых к автоматическому управлению мощностью.
Устройства автоматического управления мощностью электростанций должны обеспечивать:
|
|
прием и преобразование управляющих воздействий, поступающих с диспетчерских пунктов вышестоящего уровня управления, и формирование управляющих воздействий на уровне управления электростанций;
формирование управляющих воздействий на отдельные агрегаты (энергоблоки);
поддержание мощности агрегатов (энергоблоков) в соответствии с полученными управляющими воздействиями.
Управление мощностью электростанции должно осуществляться со статизмом по частоте, изменяемым в пределах от 3 до 6%.
На гидроэлектростанциях системы управления мощностью должны иметь автоматические устройства, обеспечивающие пуск и останов агрегатов, а при необходимости также перевод агрегатов в режимы синхронного компенсатора и генераторный в зависимости от условий и режима работы электростанций и энергосистемы с учетом имеющихся ограничений в работе агрегатов.
Гидроэлектростанции, мощность которых определяется режимом водотока, рекомендуется оборудовать автоматическими регуляторами мощности по водотоку.
Устройства АРЧМ должны допускать оперативное изменение параметров настройки при изменении режимов работы объекта управления, оснащаться элементами сигнализации, блокировками и защитами, предотвращающими неправильные их действия при нарушении нормальных режимов работы объектов управления, при неисправностях в самих устройствах, а также исключающими те действия, которые могут помешать функционированию устройств противоаварийной автоматики.
На тепловых электростанциях устройства АРЧМ должны быть оборудованы элементами, предотвращающими те изменения технологических параметров выше допустимых пределов, которые вызваны действием этих устройств на агрегаты (энергоблоки).
Средства телемеханики должны обеспечивать ввод информации о перетоках по контролируемым внутрисистемным и межсистемным связям, передачу управляющих воздействий и сигналов от устройств АРЧМ на объекты управления, а также передачу необходимой информации на вышестоящий уровень управления.
Суммарное значение [запаздывания] сигналов в средствах телемеханики и устройствах АРЧМ не должно превышать 5 с.
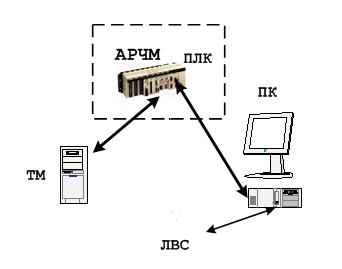
Система АРЧМ выполнена на базе программируемого логического контроллера (ПЛК) CS1. Для визуального контроля режима работы АРЧМ, задания уставок и настроечной информации, а также ведения архивов к контроллеру подключается промышленный компьютер (ПК). На ПЛК подается информация с устройства телемеханики о состоянии режима ОЭС (ТИ и ТС). Для сбора и передачи информации используются специальные каналы ТМ на аппаратуре УТК-1, УТМ-7. Приемо-передающее устройство в ОДУ – КОТМИ.
|
|
Система построена по централизованному принципу, то есть регулирующим электростанциям автоматически задается внеплановая нагрузка с диспетчерского пункта ОДУ по каналам телемеханики.
47. В цифровой системе управления необходимая величина фазы задается в виде цифрового кода, который хранится в запоминающем устройстве, откуда поступает в преобразователь «цифровой код – фазовый угол».
 | |||
| |||
Цифровой код фазы управляющих импульсов поступает от запоминающего устройства (ЗУ) и записывается в регистре Р. В момент времени, когда на аноде соответствующего тиристора VS появляется положительное напряжение uа (α = 0, рисунок 4.4, в), открывается ключевая схема К по входу «Пуск» и счетчик импульсов (СИ) начинает считать импульсы, поступающие от генератора эталонной частоты (ГЭЧ). Число импульсов в счетчике импульсов считается в том же коде, в котором представлена цифра — код фазы в регистре Р. При равенстве числа импульсов в счетчике числу импульсов в регистре схема совпадения (СС) вырабатывает импульс, фаза которого относительно момента α = 0 будет пропорциональна числу импульсов, записанных в регистре Р. Импульс с выхода СС через выходной каскад (ВК) поступает на управляющий электрод тиристора VS, а по цепи обратной связи закрывает ключевую схему по входу «Стоп», и счет импульсов прекращается, При этом счетчик импульсов (СИ) устанавливается в исходное положение и схема готова к следующему циклу преобразования. Цифровые системы отличаются высокой точностью и быстродействием.
Цифровые системы
Цифровые системы строятся на базе комплекса средств вычислительной техники, основными элементами которого являются: 1) ЦВМ, 2) устройства ввода, 3) устройства вывода.
|
|
Функции ЦВМ могут выполнять: 1) ЭВМ (компьютеры), 2) DSP – цифровые сигнальные процессоры, 3) ЦУ на жесткой логике. Первые относятся к универсальным устройствам управления, вторые специализированны для приложений, третьи разрабатываются для конкретных устройств (например, цифровой фильтр, имеющийся в каждом ΣΔ АЦП).
Устройствами ввода и вывода в случае состыковки с аналоговыми сигналами являются АЦП и ЦАП-ы, а в случае состыковки с цифровыми сигналами – порты и интерфейсы.
В системах с ЦВМ, последние могут выполнять роли: 1) регулятора, 2) регулятора и устройства сравнения, 3) корректирующего устройства или 4) самого объекта.
Если ЦВМ универсальная (ЭВМ), то возможно построение многофункциональных САУ, когда одна ЦВМ обслуживает комплекс составляющих объект устройств. Например, в автомобиле: 1) система навигации, 2) система бортового электропитания, 3) АБС, 4) электронная подвеска, 5) управление топливоподачей,... В подобных случаях в состав системы ЦУ должны входить аналоговые или цифровые мультиплексоры и демультиплексоры.
Во всех случаях ЦВМ предоставляет легко доступные информационные потоки, позволяющие кроме прямого управления осуществлять функции: 1) контроля, 2) оптимизации, 3) координации и 4) организации всех процессов.
Процессы протекающие в системах ЦУ
Дискретная природа ЦВМ определила наличие 2-х процессов в системах ЦУ: 1) дискретизации сигналов по времени (получение решетчатой функции), и 2) квантования сигналов по уровню (АЦ и ЦА преобразования).
Дискретизация сигналов по времени делает систему дискретной, а квантование по уровню – нелинейной. Оба процесса сопровождаются возникновением методических погрешностей.
Выбор частоты дискретизации производится исходя из ширины полосы пропускания или из времени регулирования замкнутой системы. Разумные частоты дискретизации в 6..10 раз больше ширины полосы пропускания или от 2-х до 4-х дискретных отсчетов за время нарастания, в противном случае качество системы будет резко ухудшаться.
Количество ступеней квантования по уровню оказывает существенное влияние на динамические свойства систем. При недостаточном их количестве могут возникать периодические режимы переключений между дискретами (автоколебания).
Может случиться так, что выполняемые ЦВМ задачи (опрос датчиков, расчет программы, формирование информационных потоков, запись в порты вывода) могут быть выполнены только при систематической задержке синтезируемого воздействия на один такт дискретизации. В таком случае в системе с ЦВМ появится запаздывание τ, которое должно быть учтено оператором запаздывания z−1 и, возможно, смещенной ПФ W(z,ε).
Обычно количество ступеней квантования по уровню велико, поэтому его влиянием пренебрегают. Это делает систему, линейной и позволяет использовать математический аппарат импульсных систем.
|
|
|

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!