

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Частотная точность определяет возможность вхождения в связь в установленное время без поиска сигнала корреспондента, а так же ведение связи без подстройки приемника при сохранении заданного качества воспроизведения сообщения в течении всего сеанса связи. Частотная точность как показатель – это разность между частотой настройки приемника и частотой принимаемого сигнала. Для характеристики частотной точности используют так же величину относительной расстройки, представляющую собой отношение разности между частотами сигнала и настройки приемника к частоте сигнала:
Нестабильность настройки РПУ во время работы оценивается изменением частоты настройки за определенный промежуток времени. Например при нестабильности 10 ¢, где t = -8, уход частоты за сутки составит fо/10 ¢, где t = 8. Например, при частоте 30 МГц уход составит 0,3 Гц в сутки.
Динамический диапазон.
Изменение амплитуд сигналов и помех в реальных условиях может достигать 80 дБ и более из-за влияния замираний, при изменении расстояния объектами (приемником и передатчиком). Пределы, в которых изменяется величина сигнала на входе РПУ, называется динамическим диапазоном.
 Количественной оценкой динамического диапазона является коэффициент, называемый “динамический диапазон”:
Количественной оценкой динамического диапазона является коэффициент, называемый “динамический диапазон”:
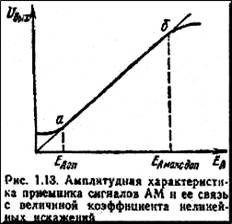
Увеличение величины входного сигнала приводит к перегрузке ТРЧ (тракта радиочастоты), снижению избирательности, так как ТРЧ начинает работать в нелинейном режиме и при усилении сигнала в этом случае появляются комбинационные составляющие. Избежать этого можно, если отрегулировать динамический диапазон в пределах линейного участка динамической характеристики РПУ. Для количественной оценки линейности динамического диапазона вводят понятие Рабочего Динамического Диапазона:
|
|
Где: Еа п – предельная чуствительность РПУ
Ea max доп - максимально допустимая ЭДС сигнала на входе РПУ.
Очевидно, что рабочий динамический диапазон Dp должен быть больше или равен Dc. Для этого в РПУ применяют АРУ и РРУ (А втоматическую и Р учную Р егулировку У силения), что позволяет уменьшить пределы изменения выходной мощности РПУ.
Выходная мощность
Это мощность, подводимая с выхода РПУ ко входу оконечного устройства. Выходная мощность Рвых должна быть номинальной для данного конкретного типа оконечного устройства ОУ и колеблется от долей ватта до нескольких ватт. Различают нормальную и номинальную выходную мощность.
Номинальная выходная мощность – это наибольшая выходная мощность, при которой возникающие нелинейные искажения не превышают заданной величины. Номинальная выходная мощность соответствует 100% модуляции принимаемого сигнала. Нормальная выходная мощность соответствует 10% от номинальной, 30% модуляции сигнала и подводится к оконечному устройству при измерении характеристик РПУ.
|
|
|

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!