Вращающиеся трансформаторы - это индукционные электрические машины, предназначенные для преобразования механического перемещения (угла поворота ротора) в электрический сигнал - выходное напряжение, амплитуда которого находится в определенной функциональной зависимости от угла поворота ротора.
Вращающиеся трансформаторы применяются в аналого-цифровых преобразователях, системах передачи угла высокой точности, в качестве датчиков обратной связи в следящих системах, бортовой аппаратуре.
В зависимости от того, какой функцией угла поворота ротора является выходное напряжение U, ВТ можно разделить на:
- синусно-косинусные ВТ, у которых выходное напряжение одной
обмотки пропорционально синусу угла поворота ротора, а другой обмотки - косинусу угла поворота ротора (СКВТ);
- линейные ВТ, у которых выходное напряжение пропорционально углу поворота ротора (ЛВТ);
- масштабные ВТ, у которых выходное напряжение пропорционально входному, и коэффициент пропорциональности (масштаб) определяется углом поворота ротора;
- датчики и приемники трансформаторных дистанционных передач угла (ВТДП), выполняющие функции, аналогичные трансформаторным сельсинам;
- преобразователи координат, осуществляющие поворот осей декартовой системы координат или переход к полярной системе координат (построители);
- индукционныефазовращатели, осуществляющие преобразование пространственного угла во временной.
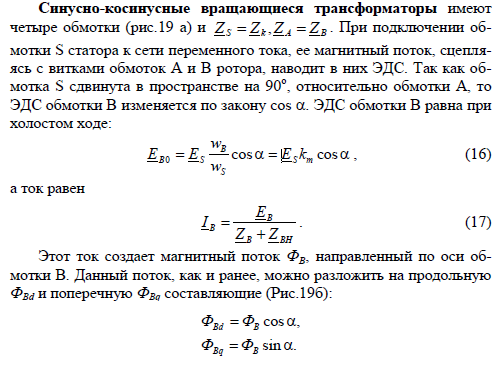
Синусный вращающийся трансформатор (рис.17а) может работать при наличии всего двух обмоток: обмотки статора S, подключенной к сети переменного тока (обмотка возбуждения) и обмотки ротора А, являющейся вторичной выходной обмоткой (рис.17а).



Симметрирование синусно-косинусных вращающихся трансформаторов (СКВТ) - это подбор сопротивления цепей статорных или роторных обмоток, при котором амплитуды ЭДС выходных обмоток изменяются строго по гармоническому закону от угла поворота.
Цель любого симметрирования - компенсация поперечного потока Фq, вносящего погрешность в выходную характеристику.
Релейные средства автоматизации. Классификация и основные параметры реле. Схемы включе-ния. Режимы работы электромеханических усилителей.
В системах автоматики одним из наиболее распространенных элементов является РЕЛЕ – устройство, в котором при плавном изменении входного сигнала осуществляется скачкообразное изменение выходного сигнала.
Реле делятся на:
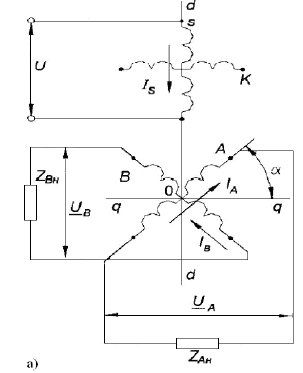
-электромагнитные нейтральные реле постоянного и переменного тока;
-электромагнитные поляризованные реле;
-вибропреобразователи;
-магнитоэлектрические реле;
-электродинамические реле;
-индукционные реле;
-реле времени;
-электротермические реле;
-шаговые искатели и распределители.
Существующие типы реле можно классифицировать по следующим основным признакам:
-назначению — управления, защиты и сигнализации;
-принципу действия — электромеханические (электромагнитные, нейтральные, электромагнитные поляризованные, магнитоэлектрические, электродинамические, индукционные, электротермические), электронные, триггерные (бесконтактно-электронные), фотоэлектронные, ионные;
-измеряемой величине — электрические (тока, напряжения, мощности, сопротивления, частоты, коэффициента мощности), механические (силы, давления, скорости, перемещения, уровня, объема и др.), тепловые (температуры, количества теплоты), оптические, силы звука и других физических величин (времени, вязкости и др.);
-мощности управления — маломощные с мощностью управления Ру<1 Вт, средней мощности с Ру= 1... 10 Вт, мощные с Ру> 10 Вт;
-времени срабатывания — безынерционные (tср< 0,001 с), быстродействующие (tср = 0,001...0,050 с), замедленные (tср = 0,15... 1,00 с), реле времени (tcp>1 с).
Основные параметры реле:
мощность срабатывания Рср— минимальная электрическая мощность, которая должна быть подведена к реле от управляющей цепи для его надежного срабатывания, т. е. приведения в действие управляемой цепи. Эта мощность определяется общими электрическими и конструктивными параметрами реле;
Мощность управления Ру— максимальная электрическая мощность в управляемой цепи, при которой контакты реле еще работают надежно. Мощность управления определяется параметрами контактов реле, переключаю-щих управляемую цепь.
-допустимая разрывная мощность Рр — мощность в цепи, разрываемой контактами при определенном токе или напряжении без образования устойчивой электрической дуги при данном напряжении;
коэффициент управления Ку — величина, характеризующая отношение управляемой мощности к мощности срабатывания реле: Ку=Ру/Рср> =1;
-время срабатывания tcp — интервал времени от момента поступления сигнала из управляющей цепи до момента начала воздействия реле на управляемую цепь. Допустимое значение tcpопределяется необходимой быстротой передачи сигнала в управляемую цепь.






