МБОУ ДО ЦДОД "Центр дополнительного образования детей" Первомайского района
ТЕХНИЧЕСКОЕ ОПИСАНИЕ РОБОТА
для участия в регламенте "Робо сумо"
Название команды:
"Пересвет"
Состав команды
Скарсюк Артём
Жуков Денис
Треннер команды
Федоринов Сергей Викторович
Описание конструкции
робота
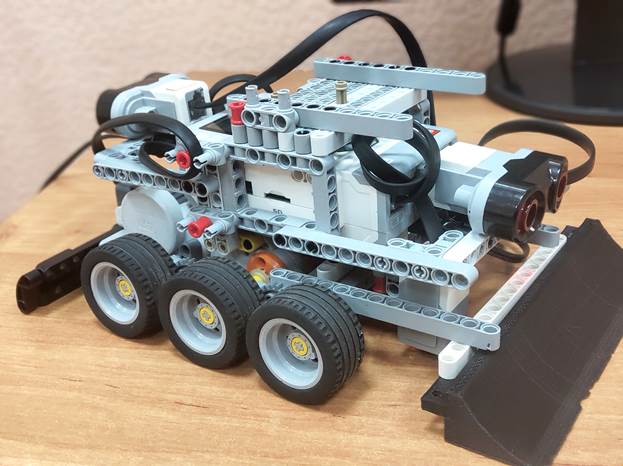
В создании робота мы использовали конструктор Lego minstorms а так же возможности 3D моделирования и 3D печати. В основу легла конструкция с моторами от конструктора NXT а шесть колес, по три с каждой стороны, диаметром 35 мм.
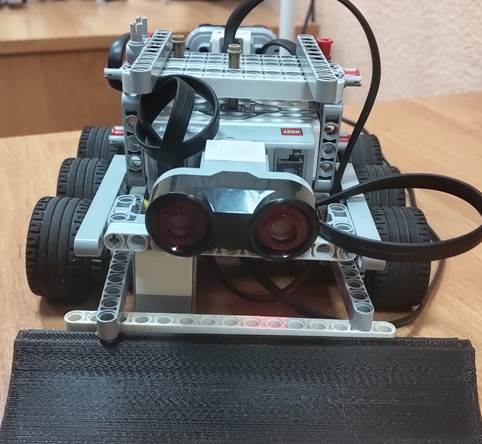
 Мы считаем что меньший диаметр колес добавит роботу дополнительный прирост в тяге. колеса были установлены на балке. Крутящий момент передается по средством шестеренок. Что бы предотвратить потери на трение шестерёнок решено было движетели( моторы) установить на среднее ( из трёх, на каждой стороне) колесе. Контроллер мы постарались закрепить как можно ниже. К особенностям конструкции можно отнести наличие двух ультразвуковых датчиков расстояния спереди и сзади. Для сокращения времени реакции робота на обнаружение противника. А так же к особенностям можно отнести создание и установка 3D бампера.
Мы считаем что меньший диаметр колес добавит роботу дополнительный прирост в тяге. колеса были установлены на балке. Крутящий момент передается по средством шестеренок. Что бы предотвратить потери на трение шестерёнок решено было движетели( моторы) установить на среднее ( из трёх, на каждой стороне) колесе. Контроллер мы постарались закрепить как можно ниже. К особенностям конструкции можно отнести наличие двух ультразвуковых датчиков расстояния спереди и сзади. Для сокращения времени реакции робота на обнаружение противника. А так же к особенностям можно отнести создание и установка 3D бампера.
На каждом этапе проводились испытания и анализ узлов для выявления конструктивных недочетов.
ПРОГРАММА
Робот программировался в среде Lego Mindstorms EV 3.0 . В программе мы использовали данные из первого и второго УЗ датчика затем сравнивали данные и в логическом переключателе давали команду на движение вперёд если в условия сравнения либо А либо Б было большем в ином другом случае робот вращается на месте в поисках противника.


Вес робота 965 грамм его размер входит в рамку 25х25см


Испытания прошли успешно и показали высокую эффективность конструкции и робота в целом. Жаль 1литровый бутыль с водой не даёт в полной мере убедится в совершенстве конструкции или выявить скрытые недостатки.





