Реферат
По дисциплине: «Автоматизация испытаний»
Тема: «Измерение перемещения»
Выполнил: студент группы
2РКК-5ДМ-210
Антипова Д.Н.
Проверил: А.В. Ртищев
Москва 2011
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. Индуктивные датчики…………………………………………………..4
2. Оптические датчики перемещения…………………………………....5
3. Вихретоковые датчики перемещения…………………………………7
4. Ультразвуковые датчики перемещения……………………………….8
5. Магниторезистивные датчики перемещения…………………………9
6. Датчики на основе эффекта Холла………………………………..…10
7. Магнитострикционные датчики перемещения……………………...10
8. Потенциометрические датчики перемещения……………………….11
9. Прецизионные датчики линейных перемещений…………………...12
10. Накапливающие системы…………………………………………….13
11. Метод муаровых полос……………………………………………….13
12. Системы позиционирования с лазерными интерферометрами…....16
Список литературы…………………………….………………………...20
ВВЕДЕНИЕ
Одним из узлов, определяющих точность работы любой системы позиционирования, являются датчики перемещения. Датчики перемещений предназначены для преобразования величины линейного перемещения или угла оборота ходового винта в унитарный код: простую последовательность одинаковых по длительности и амплитуде электрических импульсов, число которых прямо пропорционально величине углового или линейного перемещения.
Индуктивные датчики
Для преобразования непрерывно изменяющейся величины в дискретные электрические импульсы широко применяются индуктивные и оптические датчики.

Датчики перемещения Модель 8740
Данные индуктивные датчики перемещения с интегрированной электроникой содержат линейный дифференциальный трансформатор и усилитель несущей частоты (генератор, демодулятор, фильтр и усилитель), которые установлены в корпусе из нержавеющей стали.
Напряжение питания датчика осуществляется постоянным током; выходной сигнал по напряжению пропорционален перемещению. Дифференциальный трансформатор состоит из первичной и двух вторичных катушек, которые расположены симметрично относительно первичной катушки.
Наведенный сигнал во вторичных катушках датчика демодулируется, фильтруется и усиливается интегрированной электроникой. Ферромагнитный сердечник подвижен в пределах дифференциального трансформатора. В зависимости от положению этого сердечника измененяется аналоговый выходной сигнал датчика.
Модель 8740 содержит осевой свободный шток с двумя пластмассовыми направляющимими кольцами. Они обеспечивают центровку штока в центральном отверстии датчика.
Механическое крепление штока датчика на объект измерения может быть произведено посредством резьбового соединения. Следует избегать поперечных нагрузок.
Модель 8741 имеет шарикоподшипники для направления штока. Наконечник прижимается к контактной площадке объекта измерения при помощи внутренней пружины. Применение этой версии индуктивных датчиков перемещений предпочтительно в случаях, когда механическое крепление или затруднительно или просто не практично. Измерительная сторона датчика защищена от грязи, пыли и брызг резиновым сильфоном.
Схема индуктивного датчика.
Накапливающие системы
Накапливающие системы используют систему отражающих или пропускающих оптических решеток. Конструкция оптических ДЛП с отражающей решеткой показана. Диафрагма сканирующей головки содержит 4 щели. Щели размещены так, что выходные сигналы фотоприемников сдвинуты на четверть периода измерительной решетки. Так сигналы, из-за смещения щелей сдвинуты по фазе и квазисинусоидальные сигналы фотоприемников. Разрешающая способность таких систем 0.5 мкм, что при общей погрешности не более 1 мкм для измерения перемещений в диапазоне 1-2 см.
Недостаток метода: требуется строгая параллельность линий рисок и линейки двигателя. Вторая система решеток использует метод муаровых полос.
Метод муаровых полос.
Муаровые полосы – система темных зон, образуемых при наложении и подсвечивании двух идентичных слегка смещенных под углом друг относительно друга решеток.
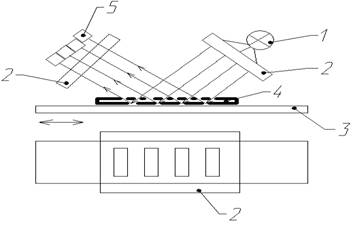
Рисунок - ДЛП перемещений с отражающей решеткой.
1 – источник света, 2 – конденсорные линзы, 3 – стальная шкала с решеткой, 4 - диафрагма, 5 – фотоприемник.
При смещении решеток друг относительно друга зоны (темные и светлые) смещаются друг относительно друга вверх-вниз на расстояние l. Р – шаг решетки, θ – угол наклона.
Основные преимущества способа: (отражательной оптики)
1. муаровая картина не зависит от длины волны света в сравнительно широком диапазоне длин волн. Это позволяет применять в качестве источника света обычные миниатюрные лампы накаливания.
2. сохраняется высокий контраст муаровой картины при относительно больших (до десяти мм) зазорах между решетками.
3. шаг муаровой картины может соответствовать величине перемещений в несколько раз меньше, чем расстояние между штрихами решеток.
Муаровая картина формируется на выходе прозрачной решетки. Линейная ширина периода муаровой картины равна:
 , (1)
, (1)
где, d1 – постоянная прозрачной решетки, θ – угол разворота штрихов.

Рисунок - Схема образования муаровых полос.
В ДЛП этот угол равен примерно 10-4, так, что перемещению решетки на 1 мкм соответствует сдвиг муаровой картины на 10 мм, что легко фиксируется фотоприемником.
Обычно достаточно двух фотоприемников. При перемещении в них формируются сигналы:
I1 = k1(E0 + Ecos2πX/ε) (2)
I2 = k2(E0 ± Esin2πX/ε), (3)
где k1, k2 – чувствительность фотоприемника, Е0 – уровень постоянной составляющей и амплитуды переменной составляющей освещенности муаровой картины, Х – величина перемещения,  - цена периода муаровой картины.
- цена периода муаровой картины.
d2 – постоянная отражающей решетки, qi – порядок дифракционного максимума.
Поскольку на 2 максимуме отражения при равнобедренных рисках приходится 80% отражающей энергии, то q = 2, ε = d2/4.
При определении положения с точностью ±ε возникают трудности интерполяции из-за колебаний постоянной освещенности Е0, которая зависит от многих факторов, в том числе и от колебаний яркости источника света, от изменяющееся отражательной способности решеток и т.д.
Поэтому иногда в ДЛП применяются фотоприемники, расположенные вдоль муаровой картины, со сдвигом на четверть периода и формируются два сигнала, каждый из которых представляет собой разность сигналов двух фотоприемников, расположенных на расстоянии половины периода муаровой картины.
ЛИТЕРАТУРА
1. Проектирования радиоэлектронных средств: Учеб. пособие для вузов /О.В.Алексеев, А.А.Головков, И.Ю.Пивоваров и др.; Под ред. О.В.Алексеева. – М.: Высш. шк., 2000. – 479 с.
2. Технология радиоэлектронных устройств и автоматизация производства: Учебник/ А.П. Достанко, В.Л.Ланин, А.А. Хмыль, Л.П. Ануфриев; Под общ. ред. А.П. Достанко. – Мн.: Выш. шк., 2002
3. Справочник конструктора РЭА: Общие принципы конструирования/ Под ред. Р.Г. Варламова. - М.: Радио, 2000.
Реферат
По дисциплине: «Автоматизация испытаний»
Тема: «Измерение перемещения»
Выполнил: студент группы
2РКК-5ДМ-210
Антипова Д.Н.
Проверил: А.В. Ртищев
Москва 2011
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. Индуктивные датчики…………………………………………………..4
2. Оптические датчики перемещения…………………………………....5
3. Вихретоковые датчики перемещения…………………………………7
4. Ультразвуковые датчики перемещения……………………………….8
5. Магниторезистивные датчики перемещения…………………………9
6. Датчики на основе эффекта Холла………………………………..…10
7. Магнитострикционные датчики перемещения……………………...10
8. Потенциометрические датчики перемещения……………………….11
9. Прецизионные датчики линейных перемещений…………………...12
10. Накапливающие системы…………………………………………….13
11. Метод муаровых полос……………………………………………….13
12. Системы позиционирования с лазерными интерферометрами…....16
Список литературы…………………………….………………………...20
ВВЕДЕНИЕ
Одним из узлов, определяющих точность работы любой системы позиционирования, являются датчики перемещения. Датчики перемещений предназначены для преобразования величины линейного перемещения или угла оборота ходового винта в унитарный код: простую последовательность одинаковых по длительности и амплитуде электрических импульсов, число которых прямо пропорционально величине углового или линейного перемещения.
Индуктивные датчики
Для преобразования непрерывно изменяющейся величины в дискретные электрические импульсы широко применяются индуктивные и оптические датчики.
Датчики перемещения Модель 8740
Данные индуктивные датчики перемещения с интегрированной электроникой содержат линейный дифференциальный трансформатор и усилитель несущей частоты (генератор, демодулятор, фильтр и усилитель), которые установлены в корпусе из нержавеющей стали.
Напряжение питания датчика осуществляется постоянным током; выходной сигнал по напряжению пропорционален перемещению. Дифференциальный трансформатор состоит из первичной и двух вторичных катушек, которые расположены симметрично относительно первичной катушки.
Наведенный сигнал во вторичных катушках датчика демодулируется, фильтруется и усиливается интегрированной электроникой. Ферромагнитный сердечник подвижен в пределах дифференциального трансформатора. В зависимости от положению этого сердечника измененяется аналоговый выходной сигнал датчика.
Модель 8740 содержит осевой свободный шток с двумя пластмассовыми направляющимими кольцами. Они обеспечивают центровку штока в центральном отверстии датчика.
Механическое крепление штока датчика на объект измерения может быть произведено посредством резьбового соединения. Следует избегать поперечных нагрузок.
Модель 8741 имеет шарикоподшипники для направления штока. Наконечник прижимается к контактной площадке объекта измерения при помощи внутренней пружины. Применение этой версии индуктивных датчиков перемещений предпочтительно в случаях, когда механическое крепление или затруднительно или просто не практично. Измерительная сторона датчика защищена от грязи, пыли и брызг резиновым сильфоном.
Схема индуктивного датчика.
Оптические датчики перемещения
Существует множество вариаций схем датчиков перемещения, основанных на различных оптических эффектах. Пожалуй, наиболее популярной является схема оптической триангуляции — датчик положения является, по сути, дальномером, который определяет расстояние до интересующего объекта, фиксируя рассеянное поверхностью объекта излучение и определяя угол отражения, что даёт возможность определить длину d — расстояние до объекта (Рисунок 3). Важным достоинством большинства оптических датчиков является возможность производить бесконтактные измерения, кроме того такие датчики обычно довольно точны и имеют высокое быстродействие.

Рис. Оптический датчик перемещения на основе схему оптической триангуляции.
В другой реализации оптического датчика, предназначенной для регистрации и определения параметров малых перемещений и вибраций, используется двойная решётчатая конструкция, а также источник света и фотодетектор. Одна решётка неподвижна, вторая подвижна и может быть механически закреплена на интересующем объекте или каким-либо способом передавать датчику его движение. Малое смещение подвижной решётки приводит к изменению интенсивности света, регистрируемой фотодетектором, причём с уменьшением периода решётки точность датчика возрастает, однако сужается его динамический диапазон.

Рис. Оптический датчик перемещения на основе дифракционных решеток.
Дополнительными возможностями применения обладают оптические датчики, учитывающие поляризацию света. В таких датчиках может быть реализован алгоритм селекции объектов по отражательным свойствам поверхности, т.е. датчик может «обращать внимание» только на объекты с хорошей отражающей способностью, прочие объекты игнорируются. Разумеется, чувствительность к поляризации негативно сказывается на стоимости подобных устройств.






