Принцип работы РЛС (RADAR).
Процесс обнаружения объектов в пространстве и определение их координат радиотехническими методами называется радиолокацией. Приборы, обеспечивающие радиолокацию объектов в пространстве, называются радиолокационными станциями (РЛС). По принципу устройства и работы различают несколько видов РЛС:
Активные и пассивные. В обоих случаях полезная информация от объекта доставляется радиосигналами, приходящими от объекта к РЛС. Пассивная РЛС содержит только антенну и приемник. В состав активной РЛС кроме антенны и приемника входит передатчик.
Непрерывного излучения:
-немодулированные;
-доплеровские;
-с частотной модуляцией.
Импульсного излучения.
Для радионавигации на море используется и совершенствуется лишь один вид – активная импульсная двухкоординатная РЛС.
В качестве индикатора используется электронно-лучевая трубка (ЭЛТ) с яркостной отметкой или жидкокристаллический дисплей (на некоторых современных станциях). Эхо-сигнал, усиленный в приемнике РЛС и преобразованный в видеоимпульс, попадая на ЭЛТ, увеличивает интенсивность электронного потока луча, падающего на люминофор экрана ЭЛТ.
Морские навигационные РЛС измеряют два параметра в полярной системе координат: расстояние до объекта и направление на объект (курсовой угол или пеленг).
Измерение расстояний производится амплитудным (импульсным) способом. Расстояние до объекта определяется измерением времени tD от момента излучения «зондирующего» импульса до приема соответствующего отраженного импульса. Время tD определяется как время прохождения импульса до объекта и обратно:
 ,
,
где D – расстояние до объекта;
с – скорость распространения радиоволн.
Определив время tD, и зная скорость распространения радиоволн, определим расстояние до объекта по формуле:

Масштаб дальности определяется как отношение предельного значения шкалы дальности к радиусу экрана:
 ,
,
где, Кэ ≈ 0,8 – коэффициент использования экрана;
dэ – диаметр экрана.
Для измерения расстояния до объекта формируется электронная шкала дальности в виде яркостных отметок на развертке. Определение угловых координат объектов основывается на использовании антенны остронаправленного действия. В морской радиолокации применяется амплитудный метод максимума. При пеленгации по методу максимума антенна плавно поворачивается, и отсчет угла цели производится в тот момент, когда амплитуда сигнала на входе приемника достигает максимума. В современных станциях реализовано автоматическое слежение за объектом по дальности и углу.
Принцип действия импульсной РЛС
Импульсный метод в радиолокации позволяет довольно просто одновременно наблюдать несколько объектов, расположенных в зоне действия РЛС, так как эхо-сигналы смещены во времени в зависимости от дальности до объекта. Решение этой задачи при непрерывном излучении приводит к большому усложнению аппаратуры. Он позволяет измерить большие расстояния при небольших размерах приборов и использовать для передачи и приема сигналов одну и ту же антенну. Эти причины, несмотря на недостатки присущие методу, являются решающими в выборе импульсного метода для построения морских навигационных РЛС.
 - формула определения
- формула определения
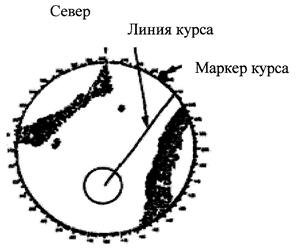
Режим Истинное движение
Собственное судно и другие движущиеся объекты перемещаются в соответствии с их истинными курсами и скоростями. В режиме ТМ
стабилизированном относительно земли, все фиксированные цели, такие как земные массивы, появляются как стационарные эхосигналы. В режиме
ТМ стабилизированном относительно моря, без ввода сноса и дрейфа земные массы могут двигаться на экране. Когда собственное судно достигает точки,
соответствующей 75% радиуса дисплея, автоматически смещается в точку на 75% радиуса направлению противоположному направлению маркера курса, проходящего через центр дисплея. Смещение может быть сделано в любой момент, до того как судно достигнет предела. Если компас не исправен, режим изменяется на HU и маркер севера исчезает.
НАСТРОЙКА(TUNE)
ФУНКЦИЯ
Позволяет произвести ручную настройку радиолокационного приемника (только для ведущего индикатора радара). Настроечная функция не доступна и не показана на подчиненных дисплеях, она только ограничено действует на системах автоматической регулировки частоты (АРЧ).
ВЫБОР
Чтобы вручную настроить радар, выполните следующее:
- Выделите окно ТUNЕ (НАСТРОЙКА);
- Чтобы настроить радар, держите нажатой любую кнопку, тогда Вы увидите позицию существующей настройки в красном прямоугольнике;
Перемещайте трекбол вправо/влево для оптимизации настройки, она изменяется при перемещении красного управляющего прямоугольника из стороны в сторону. Зеленый настроечный прямоугольник показывает максимально возможное значение. Отпустите кнопку.
Примечание: Чтобы правильно обеспечить действие функции АРЧ в радиолокационном приемнике, указатель крас ного управляющего прямоугольника настройки должен быть установлен в средней позиции.
Чтобы вывести только радиолокационное изображение
S А R Т приходится нарушать настройку, и перемещать трекбол так, чтобы достигнуть минимума по зеленому настроечному прямоугольнику.
КОЭФФИЦИЕНТ УСИЛЕНИЯ (GAIN)
Регулировка GAIN устанавливает предел усиления для радиолокационных сигналов, выводимых на экране. Коэффициент усиления должен подниматься до тех пор, пока ровный "точечный" фон точно видим на экране.
Если коэффициент слишком высокий, то возникает плохое качество изображения из-за чрезмерных шумов; если коэффициент слишком низкий, то в результате - потеря слабых целей и снижение дальности обнаружения.
В условиях сильных осадков (дождя, града или снега) снижение уровни коэффициента GAIN понижает помехи и создает более четкое изображение.
Уровень коэффициента может быть установлен от 0 (низкий) до 9 (высокий), обычный действующий уровень - между 6 и 8.
Не устанавливайте слишком высокий уровень, т.к. излишний шум понизит качество изображения на экране.
РУЧНАЯ РЕГУЛИРОВКА ПОДАВЛЕНИЯ ПОМЕХ ОТ МОРСКОЙ ПОВЕРХНОСТИ - SЕА
SЕА (STC) - ручная регулировка, которая подавляет отражения от морской поверхности. Максимальное подавление происходит на 0 дальности и уменьшается до тех пор, пока не произойдет снижение сигналов или помех на максимальной дальности - около 6 миль.
Уровень SЕА может быть установлен от 0 (минимальный) до 9 (максимальный), обычный действующий уровень - от 3 до 5 (на средней длине импульса). Меньший уровень должен применяться на коротком импульсе, больший - на длинном импульсе.
К выбору верного коэффициента для SЕА при любых данных погодных условиях можно прийти только с опытом. Если коэффициент слишком высок, можно потерять ближние цели. НИКОГДА регулировка SЕА не уберет ВСЕ помехи, не подавив при этом полезные сигналы, поэтому оставляйте слабое свечение помех.
Когда не используется регулировка подавления помех, SЕА должен всегда быть установлен на 0.
Примечание:
1. Длина импульса действует на коэффициент, например, более короткий импульс требует болев низкого коэффициента.
2. Выбранный коэффициент должен обеспечить компромисс между снижением помех от морской поверхности и сохранением сигналов от целей.
АВТОМА ТИЧЕСКАЯ РЕГУЛИРОВКА ПОДАВЛЕНИЯ ПОМЕХ ОТ МОРСКОЙ ПОВЕРХНОСТИ - SEA (АUTO)
Функция АUTО обеспечивает автоматическое подавление помех. Радиолокационные сигналы выравниваются, чтобы образовать динамически подстраиваемый предел для помех, но при этом сохранить действительные сигналы цели. Уровень АUTО может быть прекрасно отрегулирован с помощью уровня GAIN.
Режим АUТО эффективно действует в открытом море и в устьях рек, однако, какой-нибудь элемент берега может быть подавлен. Ответы радиолокационного маяка-ответчика (RАСОN) могут быть понижены, но часть ответа обычно видима.
РЕГУЛИРОВКА ПОДАВЛЕНИЯ ПОМЕХ ОТ ДОЖДЯ - RAIN
Регулировка RAIN понижает помехи от дождя, снега и града. Функция использует принимаемые радиолокационные сигналы для установки предела данного уровня. Управление RAIN перемещает предел уровня так, чтобы применить большее или меньшее поглощение по радиолокационному сигналу.
Функция RAIN также обеспечивает поглощение помех от морской поверхности, хотя вероятно подавление сигналов маяка-ответчика. Уровень RAIN может быть установлен от 0 (минимальный) до 9 (максимальный), обычный действующий уровень - от 3 до 5.
Когда регулировка не используется, RAIN всегда должен быть установлен на 0.
Коэффициент RAIN должен регулироваться для сохранения малых целей. Это часто полезно при незначительном снижении коэффициента GAIN для оптимизации обнаружения целей при сильных осадках.
Использование радара на диапазоне S-Band) выгодно в условиях очень сильных осадков.
Примечание: Функция RAIN также улучшает разрешающую способность на коротких расстояниях.
ВЫБОР
Чтобы установить или изменить коэффициенты GAIN, SEA или RAIN, выполните следующее:
- Выделите любое из окон G/S/R, расположенных в нижнем левом углу
дисплея.
- Нажмите и держите соответствующую кнопку: левую - для GAIN, центральную - для SЕА или правую – для RAIN. Перемещайте трекбол (по
оси Север/Юг) до тех пор, пока не установится требуемый коэффициент, а затем отпустите кнопку. Быстрое движение трекбола - при
уменьшении коэффициента GAIN или при увеличении коэффициентов SEA/RAIN - очищает следы.
Примечание: Выбранное окно (G / S / R) изменяет свой цвет с синего на черный.
- Чтобы отменить выбор функции G/S/R, переместите курсор за границы окна G/S/R.
УСТАНОВКА АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ ПОМЕХ ОТ МОРСКОЙ ПОВЕРХНОСТИ – AUTO SEA CLUTTER
Чтобы установить функцию SЕА в автоматическом режиме - АUTO (А):
- Выберите функцию SЕА, как описано выше, и быстро поверните трекбол по оси Юг до тех пор, пока не появится 'А' в окне. Обратите внимание, что следы целей очищаются как только выбирается режим АUТО,
так как удаляются помехи, покрывающие следы;
- Чтобы отменить АUTO, быстро поверните трекбол по оси Север.
Назначение системы САРП (ARPA), ее отличие от простой РЛС?
Функции современных судовых РЛС не ограничиваются отображением на экране индикатора кругового обзора (ИКО) видимых целей.
Все суда, оборудованные РЛС, должны обеспечивать радиолокационную прокладку на экране РЛС.
В зависимости от степени автоматизации, средства радиолокационной прокладки подразделяются на электронные средства прокладки (ЭСП), средства автосопровождения (САС), средства автоматической радиолокационной прокладки (САРП). САРП является наиболее автоматизированным средством. Минимальный эффективный диаметр экрана для САРП должен быть 250мм.
САРП совместно с РЛС предназначены для повышения безопасности плавания судов в районах интенсивного судоходства, вблизи берегов, в зонах разделения движения, в узкостях и по фарватерам в любых гидрометеорологических условиях.
САРП – датчик информации, необходимый судоводителю для правильной оценки ситуации встречи с другими судами и принятия обоснованного решения для успешного расхождения с ними.
САРП выполняет обработку радиолокационной информации и позволяет производить:
· ручной и автоматический захват целей и их сопровождение;
· отображение на экране индикатора векторов относительного и истинного перемещения целей;
· выделение опасно сближающихся целей по установленным критериям: расстоянию кратчайшего сближения Dкр и времени кратчайшего сближения tкр ;
· индикацию на буквенно-цифровом табло основных параметров движения и элементов сближения целей;
· проигрывание маневра курсом и скоростью для безопасного расхождения;
· автоматизированное решение навигационных задач: счисление пути судна, определение суммарного сноса;
· отображение элементов содержания навигационных карт;
· определение обсервованных координат местоположения судна на основе радиолокационных измерений.
Какие существуют способы ввода величины скорости собственного судна в САРП (ARPA)?
Обычная выведенная скорость (Speed) – скорость судна, полученная из двух источников: с лага (LOG) собственного судна или от ручного (MAN) ввода скоростей. Однолучевой лаг или ручной ввод скорости даст скорость относительно моря. Доплеровский лаг (двух лучевой лаг – X-Y оси) даст
скорость относительно морского дна.
Какие вы знаете типы лагов?
МЕХАНИЧЕСКИЕ ЛАГИ
Лагами называются приборы, служащие для измерения скорости судна и пройденного им расстояния. Механический лаг работает следующим образом: за кормою судна с помощью лаглиня буксируется вертушка, вращающаяся под действием на ее лопасти встречного потока воды. Частота вращения вертушки зависит от скорости движения судна. Через лаглинь вращение вертушки передается на счетчик, который показывает скорость и число пройденных судном миль.
Отечественные заводы выпускают механические забортные лаги двух типов: лаг ЛЗМ — для измерения скоростей от 5 до 15 уз и лаг ЛЗБ — для измерения скорости до 25 уз. Они отличаются друг от друга устройством вертушек и зубчатых передач счетчика.

Основной частью лага (рис. 22) является вертушка 1, представляющая собой герметичный, латунный, пустотелый цилиндр с конусообразным передним концом, который заканчивается очком для крепления лаглиня. К боковой поверхности цилиндрической части вертушки на равных расстояниях друг от друга припаяны четыре лопасти. У лага ЛЗМ лопасти составляют с осевой линией цилиндра угол 9°, и за одну пройденную милю вертушка совершает 882 оборота. У лага ЛЗБ лопасти составляют с осевой линией цилиндра угол 5°, и вертушка совершает 558 оборотов. В очко, имеющееся в передней части вертушки, вплеснен конец плетеного лаглиня длиной около 60 см, другой конец которого вплеснивается в очко соединительной груши 2, которая, в свою очередь, соединяется с лаглинем 3. Груша служит для надежного соединения вертушки с лаглинем, а также обеспечивает, в случае необходимости, быструю замену одной вертушки другой. Вращение вертушки через лаглинь передается на механический счетчик пройденного расстояния. Лаглинь изготавливают из специального плетеного льняного троса, который не должен закручиваться, диаметром 10 мм. В среднем длина лаглиня бывает в пределах 70— 100 м. Один конец лаглиня соединен с грушей, а другой оканчивается плоским латунным гаком, который соединен со ступицей маховика лага. Маховик 4 предназначен для выравнивания частоты вращения оси счетчика и поглощения рывков и вибрации лаглиня. Состоит маховик из обода и ступицы с шестью спицами. На концах ступицы имеются два очка, в одно из которых запрессовано стальное кольцо, к которому и крепится гак лаглиня. Во второе очко вплеснен конец плетеного лаглиня длиной около 50 см с гаком на конце, которым маховик соединяется с механическим счетчиком.
Механический счетчик 5 помещен в кожух и состоит из счетного механизма и контактного прибора. Вращение вертушки через лаглинь передается на валик хвостовой части счетчика, откуда, в свою очередь, на главную ось счетного механизма, состоящего из системы, червячных передач и шестеренок. Механизм счетчика имеет циферблат с тремя шкалами. На центральной большой шкале отсчитываются целые мили, пройденные судном (от 0 до 100), на правой малой шкале отсчитываются десятые доли мили, а на левой малой шкале — сотни миль (от 100 до 1000). Показания основного механического счетчика лага передаются на репитер (электрический счетчик), устанавливаемый в штурманской рубке. Для этого в механизме основного счетчика имеется контактный прибор, который через каждые 0,1 мили замыкает и размыкает цепь постоянного тока, ведущую к репитеру.
Механизм электрического счетчика репитера состоит из электромагнита и системы шестеренок. Репитер, как и основной счетчик, имеет аналогичные три циферблата, показывающие целые мили, десятые доли и сотни миль.
Выпускают лаг за борт сразу после выхода судна в открытое море. Вертушку лага выбрасывают с подветренного борта, чтобы при дрейфе судна ее не заносило в кильватерную струю.
Работу по выпуску лага выполняют два матроса: проверяют исправность лага; вертушка не должна иметь вмятин, погнутых лопастей, ось хвостовой части счетчика должна вращаться свободно, без заеданий; затем устанавливают счетчик лага в башмак так, чтобы штырь башмака заскочил в отверстие на пятке. В условиях штормовой погоды рекомендуется для надежности дополнительно закрепить счетчик швертом за вертикальную стойку. Потом в ушко хвостовой части счетчика закладывают гак маховика и гак линя — в очко маховика. При штормовой погоде гак тоже закаболивают. Для подключения репитеров штепсельную вилку вставляют в штепсельную коробку и завинчивают крышку вилки. Затем осторожно, чтобы вертушка не ударилась о борт судна, опускают ее до воды и начинают вытравливать лаглинь, перебирая его руками. Перед выпуском лага за борт лаглинь должен быть уложен на палубе длинной бухтой, так чтобы на лаглине не образовались калышки и не перепутались шлаги. Выпуская за борт лаглинь, выводят за борт и маховик, придерживая его руками, чтобы дать небольшую слабину линю, соединяющему маховик со счетчиком. Когда лаглинь будет вытравлен почти полностью, один из матросов, удерживая натянутый лаглинь, плавно передает его натяжение на маховик, а другой — на счетчик. После этого замечают время начала работы лага и егоотсчет.
Сразу после выпуска лага счетчик некоторое время вращается быстрее обычного, потому что с момента падения вертушки в воду и до начала работы счетчика лаглинь успел закрутиться больше, чем при нормальной работе лага.
При подходе к порту или к месту якорной стоянки лаг необходимо убрать. Для уборки лага выделяют также двух матросов. Один из них начинает выбирать лаглинь, а другой, отсоединив гак от маховика, переносит конец лаглиня с гаком на другой борт и стравливает весь лаглинь в воду для раскручивания. При подъеме вертушки из воды надо следить, чтобы она не ударилась о борт судна. Подержав некоторое время лаглинь в воде, чтобы он раскрутился, его быстро выбирают и укладывают длинной бухтой на палубе. Затем отсоединяют маховик от счетчика, выключают ток в цепи лага, вынимают из гнезда штепсельной коробки штепсельную вилку и, приподняв штырь на башмаке, снимают счетчик. Гнездо штепсельной коробки закрывают глухой крышкой.
Во время работы лага необходимо постоянно следить за равномерностью вращения маховика и не реже одного раза за вахту сличать показания механического счетчика и репитеров. Через каждые 12 ч непрерывной работы лага хвостовую часть смазывают специальным маслом. После уборки лага лаглинь укладывают в длинную бухту и подвешивают для просушки, а затем убирают в предназначенное для хранения место. Счетчик и маховик лага насухо вытирают, вертушку промывают пресной водой и смазывают тонким слоем бескислотного вазелина. Хранят лаг в специальном футляре.
 РУЧНОЙ(СЕКТОРНЫЙ) ЛАГ
РУЧНОЙ(СЕКТОРНЫЙ) ЛАГ
Ручной лаг состоит из тяжелого фанерного треугольника (сектора), прикрепленного к линю, на котором завязаны узлы через каждые 7,71 м. Лаг бросают за корму яхты, и число узлов, которые пройдут через руку за 15 с, укажут скорость яхты (1 уз - 7,71 м за 15с).
 ВЕРТУШЕЧНЫЙ ЛАГ
ВЕРТУШЕЧНЫЙ ЛАГ
Вертушечные лаги устанавливают на корпусе яхты ниже уровня ватерлинии. Частота вращения вертушки типа мельничного колеса или турбинки (небольшого винта) передается с помощью электронных средств или механически на дистанционный указатель скорости и пройденного расстояния.
Гидравлические лаги — приборы, которые предназначены для измерения скорости судна и пройденного расстояния относительно воды, почему они и являются не абсолютными, а относительными.
На судах морского флота широкое распространение получили гидравлические лаги ЛГ-2 и МГЛ-25.
Принцип действий гидравлического лага основан на измерении скоростного напора встречного потока, обтекающего судно при его движении.
В движущейся жидкости наблюдаются статическое и динамическое давления. Причиной статического давления является ее сжатие. Динамическое давление зависит от скорости течения жидкости.
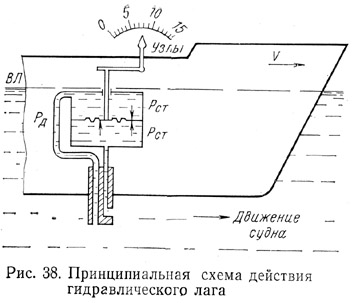 Современный гидравлический лаг работает следующим образом (рис. 38). В корпусе судна, ниже ватерлинии, устанавливается герметическая камера, которая разделена на нижнюю и верхнюю полости подвижной диафрагмой. Отверстие, которое передает статическое давление, соединено с верхней камерой, отверстие полного давления — с нижней полостью. Пока судно не имеет хода, давление воды на верхнюю и нижнюю полости мембранного устройства одинаково и равно статическому давлению воды, в результате чего диафрагма будет находиться в нулевом положении. Когда судно получит движение в приемной трубке, кроме статического давления, появится динамическое (скоростной напор), и диафрагма при этом начнет приподниматься.
Современный гидравлический лаг работает следующим образом (рис. 38). В корпусе судна, ниже ватерлинии, устанавливается герметическая камера, которая разделена на нижнюю и верхнюю полости подвижной диафрагмой. Отверстие, которое передает статическое давление, соединено с верхней камерой, отверстие полного давления — с нижней полостью. Пока судно не имеет хода, давление воды на верхнюю и нижнюю полости мембранного устройства одинаково и равно статическому давлению воды, в результате чего диафрагма будет находиться в нулевом положении. Когда судно получит движение в приемной трубке, кроме статического давления, появится динамическое (скоростной напор), и диафрагма при этом начнет приподниматься.
Разность динамического (полного) давления в приемной трубке и статического, приложенная к диафрагме, заставит двигаться соединенный с ней шток со стрелкой указателя, которая соответственно отклоняется. По величине отклонения стрелки судят о величине скорости судна.
При плавании на мелководье и во льдах выстреливаемые за обшивку корпуса судна трубки часто повреждаются. Это вызвало необходимость создания так называемого штевневого лага.
У штевневого лага полное давление передается через специальное отверстие в форштевне, а статическое — через отверстия в бортах или днище судна.
Указатель скорости и пройденного расстояния размещается в центральном приборе лага, устанавливаемом обычно в машинном отделении.
Показания скорости и пройденного расстояния передаются на репитеры лага, которые помещают в штурманской, рулевой рубках и в других помещениях судна. Лаг МГЛ-25 позволяет измерять скорость до 25 уз.
94. Какие вы знаете типы эхолотов?
РУЧНОЙ ЛОТ
 Приборы, которые на судах служат для измерения глубин, называются лотами. Лоты делятся на ручные, механические и гидроакустические, или эхолоты. Ручным лотом (рис. 23) измеряют глубину до 50 м при скорости судна до 5 уз. Ручной лот состоит из свинцовой или чугунной гири и прикрепленного к гире лотлиня. Гиря имеет форму пирамиды или конуса высотой 25—30 см и массой 3—5 кг. В верхней части гиря имеет ушко. В него продевается проволочная стропка, обшитая кожей, за которую крепится лотлинь. В нижнем основании гири имеется выемка, заполняемая смесью сала с толченым мелом или размятым мылом. При касании лотом дна частицы грунта прилипают к этой массе и по ним можно судить о характере грунта. Лотлинь имеет длину более 50 м, изготовляется из плетеного линя или несмоленого пенькового троса прямого спуска окружностью около 25 см. Разбивка лотлиня начинается от вершины гири. Высота самой гири в расчет не принимается, так как при определении глубины она обычно ложится на грунт.
Приборы, которые на судах служат для измерения глубин, называются лотами. Лоты делятся на ручные, механические и гидроакустические, или эхолоты. Ручным лотом (рис. 23) измеряют глубину до 50 м при скорости судна до 5 уз. Ручной лот состоит из свинцовой или чугунной гири и прикрепленного к гире лотлиня. Гиря имеет форму пирамиды или конуса высотой 25—30 см и массой 3—5 кг. В верхней части гиря имеет ушко. В него продевается проволочная стропка, обшитая кожей, за которую крепится лотлинь. В нижнем основании гири имеется выемка, заполняемая смесью сала с толченым мелом или размятым мылом. При касании лотом дна частицы грунта прилипают к этой массе и по ним можно судить о характере грунта. Лотлинь имеет длину более 50 м, изготовляется из плетеного линя или несмоленого пенькового троса прямого спуска окружностью около 25 см. Разбивка лотлиня начинается от вершины гири. Высота самой гири в расчет не принимается, так как при определении глубины она обычно ложится на грунт.
Деления лотлиня обозначают марками из кожи, вырезанными в виде зубцов, топориков и матерчатых флагдуков (рис. 24). На советских судах разбивка лотлиня производится в метрических единицах.
Разбивка лотлиня производится по следующей системе. Десятки метров обозначаются флагдуками различных цветов: 10 м — красный флагдук; 20 — синий; 30 — белый, 40 — желтый, 50 — бело-красный.
Число метров, оканчивающихся цифрой «пять», обозначается кожаной маркой с топориками: 5м — марка с одним топориком, 15 — с двумя топориками, 25 — с тремя, 35 — с четырьмя, 45 — с пятью.
 В каждой пятерке первый метр обозначается кожаной маркой с одним зубцом, второй—с двумя зубцами, третий— с тремя, четвертый — счетырьмя.
В каждой пятерке первый метр обозначается кожаной маркой с одним зубцом, второй—с двумя зубцами, третий— с тремя, четвертый — счетырьмя.
Следовательно, 1, 6, 11, 16, 21, 26, 31, 36, 41, 46 м обозначены марками с одним зубцом; 2, 7, 12, 17, 22, 27, 32, 37, 42, 47 -с двумя зубцами; 3, 8, 13, 18, 23, 28, 33, 38, 43, 48 — с тремя; 4, 9, 14, 19, 24, 29, 34, 39, 44, 49 — с четырьмя.
Для того чтобы при дрейфе лотлинь не попал под корпус судна, лот бросают всегда с наветренного борта. Матрос, встав на место, набирает в одну руку небольшую бухту лотлиня, ровными шлагами, наблюдая, чтобы они не перепутались, и лотлинь мог свободно вытравливаться. Для удобства бросания лота в лотлинь на расстоянии 2—3 м от вершины гири заделывают клевант из твердой породы дерева. По команде с мостика матрос начинает раскачивать лот над водой и затем делает три-четыре круговых размаха. В тот момент, когда лот, пройдя нижнюю точку, начнет подниматься, лотовый выпускает клевант. Лот летит вперед и падает тем дальше, чем сильнее лотовый раскачал лот перед бросанием. Затем лотовый травит лотлинь до тех пор, пока лот не достигнет дна. Если лотлиня вытравлено больше, чем требуется, лотовый быстро подбирает слабину.
Когда судно подойдет к месту бросания лота, лотовый, заметив, что лотлинь принял вертикальное положение, приподнимает лот, ударяя гирей о грунт, замечает марку у воды и докладывает: «Глубина столько-то метров». Если лотовый не почувствовал удара лота о грунт, значит лот не достал дна. В этом случае замечают марку у воды и докладывают: «Пронесло столько-то метров». Ночью лотовый замечает марку, которая у него в руке, и из этой величины вычитает высоту надводного борта. После окончания измерения глубины лотлинь хорошо просушивают и наматывают на деревянную переносную вьюшку.
Ручной лот до настоящего времени используется на судах. Он прост и безотказен в эксплуатации, уход за ним заключается в тщательной просушке лотлиня после его употребления и в периодической проверке его разбивки. Недостатками ручного лота являются: невозможность измерения больших глубин; необходимость уменьшать ход во время измерения; затраты значительного времени на измерение; возможное изменение длины лотлиня за счет частого намокания и высыхания.
Эхолот измеряет время, за которое звуковой импульс достигает дна и в отраженном виде возвращается назад. Этот сигнал преобразуется в показатель глубины, который высвечивается на специальном табло или дисплее.
 Некоторые эхолоты имеют неоновый дисплей, по которому можно определить характер морского дна. Прямая линия на дисплее означает, что поверхность дна твердая, расплывчатая -что грунт илистый.
Некоторые эхолоты имеют неоновый дисплей, по которому можно определить характер морского дна. Прямая линия на дисплее означает, что поверхность дна твердая, расплывчатая -что грунт илистый.
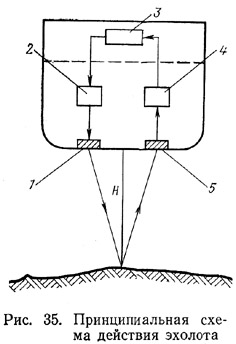
Эхолот —навигационный гидроакустический лот, которым измеряют глубину до 2 тыс. м. Принцип действия эхолота основан на измерении времени прохождения ультразвукового импульса от вибратора-излучателя до морского дна и обратно до вибратора-приемника. В вибраторах используются ферромагнитные материалы (железо, кобальт, никель), которые обладают свойством магнитострикционного эффекта. Этот эффект заключается в деформации ферромагнитных материалов при их намагничивании.
В вибраторе-приемнике используется обратный магнитострикционный эффект, который состоит в изменении магнитного поля в ферромагнитных намагниченных материалах при их деформации.
 Вибраторы эхолотов состоят из' пакета тонких никелевых пластин с намотанной на них электрической обмоткой.
Вибраторы эхолотов состоят из' пакета тонких никелевых пластин с намотанной на них электрической обмоткой.
Рассмотрим принципиальную схему действия эхолота (рис. 35). Электродвигатель вращает с равномерной скоростью диск указателя глубин 3 с неоновой лампочкой. В тот момент, когда на диске указателя глубин неоновая лампочка пройдет через нулевое деление шкалы глубин, кулачковый контакт замкнет электроцепь, состоящую из посылочного конденсатора 2, заряженного до напряжения 1500 В и обмоток вибратора-излучателя 1. При этом конденсатор разрядится, и ток разряда, протекая по обмоткам вибратора-излучателя, вызовет появление переменного электромагнитного поля в никелевых пластинах пакета вибратора. Явление магнитострикционного эффекта вызовет колебания излучающей поверхности вибратора и в виде ультразвукового импульса дойдет до морского дна и, частично отразившись, вернется на вибратор-приемник 5. Попав на пакет вибратора-приемника, отраженный импульс вызовет его колебания и, следовательно, изменение остаточного магнитного поля. Изменение магнитного поля создаст в обмотке вибратора незначительную переменную электродвижущую силу. Возникшее таким образом напряжение поступает в усилитель 4, и затем усиленный импульс подается на неоновую лампочку, вызывая ее кратковременное зажигание.
За промежуток времени между посылкой и приемом сигнала диск с неоновой лампочкой повернется на угол, пропорциональный времени прохождения сигнала.
Установленная перед вращающимся диском шкала указателя глубин отградуирована в метрах. Таким образом, деление шкалы, против которого произойдет вспышка неоновой лампочки, покажет глубину под килем судна. Оба вибратора смонтированы в днище судна.
На современных транспортных судах устанавливаются навигационные
магнитострикционные эхолоты НЭЛ-5.
Погрешность при измерении глубин свыше 200 м не более ±2%. Указатель глубин управляет посылкой ультразвуковых импульсов, является визуальным индикатором измеряемых глубин и имеет два диапазона глубин: 0—100 и 0—2000 м. На шкале первого диапазона каждое деление соответствует 0,5 м, а на шкале второго—10 м. При измерении малых глубин эхолот включают на первый диапазон, а при измерении больших глубин — на второй.
На корпусе указателя глубин (рис. 36) расположены рукоятки выключателя 1, переключателя диапазонов 5, регулятора усиления 3, выключателя 4 гашения нулевой вспышки неоновой лампочки и вольтметр 2, контролирующий рабочее напряжение. Помимо указателя глубин, эхолот НЭЛ-5 имеет самописец, который автоматически и непрерывно записывает измеряемые глубины на специальную бумажную ленту.
На лицевой стороне крышки самописца (рис. 37) расположены два предохранителя 1, вольтметр 3, лампочка 2, сигнализирующая о включении в работу указателя, выключатель самописца 10, переключатель диапазонов 9, рукоятка 6 регулятора усиления, выключатель 8 гашения нулевой вспышки, кнопки 7 оперативных обмоток, тумблер 5 и лампа 4 контроля скорости вращения двигателя самописца. Одновременная работа указателя глубин и самописца невозможна.
Пуск эхолота производится следующим образом. При питании от сети переменного тока выключатель фильтра ставят в положение «Включено». Для остановки эхолота требуется вывести регулятор усиления и выключатель указателя глубин самописца или поставить в положение «Выключено».
Измерение глубин производится следующим образом. После пуска эхолота переключатель шкал устанавливают на диапазон измеряемых глубин. Если приблизительная глубина неизвестна, измерение начинают с большего диапазона. При измерении малых глубин включается тумблер гашения нуля. Отсчет глубин на ленте самописца производится по верхней кромке записи.
В последнее время на некоторых судах устанавливают пьезоэлектрические эхолоты НЭЛ-10, у которых в качестве колебательной системы вибраторов используется призма титаната бария.
95. Какие вы знаете типы компасов?
МАГНИТНЫЕ КОМПАСЫ
Морские магнитные компасы — основные навигационные, приборы (несмотря на наличие гирокомпасов), которые служат для определения курса судна и направлений на береговые предметы и небесные светила. По компасу можно также определить приближенное направление ветра и дрейфа судна.
Магнитные компасы просты по устройству и в то же время безотказны в работе. Они не связаны ни с источниками энергии, ни с какими-либо другими приборами, и к тому же их стоимость относительно небольшая. Все морские суда снабжаются магнитными компасами, независимо от наличия на них гирокомпасов.
Магнитный компас работает на основе свойства намагниченной стрелки располагаться своей осью вдоль магнитных силовых линий магнитного поля Земли; следовательно, стрелка компаса должна показывать направление магнитного меридиана в данной точке на поверхности Земли. В связи с тем что на магнитную стрелку компаса, установленного на судне, действуют магнитные поля Земли и судового железа, ось магнитной стрелки или линия NS картушки магнитного компаса располагается в плоскости компасного меридиана.
По назначению морские магнитные компасы делятся на главные и путевые.
Главный магнитный компас, как об этом говорит само название, является наиболее важным навигационным прибором, который обычно устанавливают на верхнем мостике в диаметральной плоскости судна в возможной удаленности от влияния судового железа, что обеспечивает наиболее оптимальные условия работы компаса. По главному компасу судоводитель назначает заданный курс, проверяет показания путевого компаса и 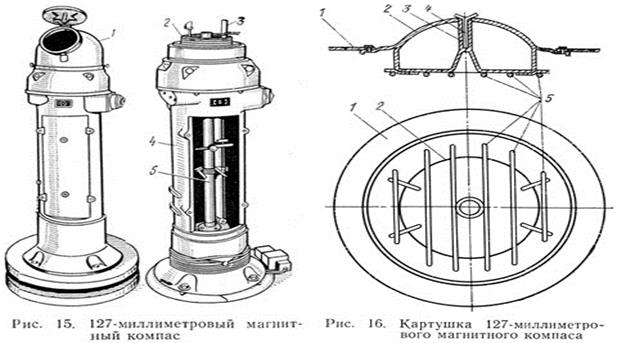 гирокомпаса, пеленгует береговые объекты для определения места.
гирокомпаса, пеленгует береговые объекты для определения места.
Путевой магнитный компас служит как указатель курса и, как правило, устанавливается в рулевой рубке перед рулевым.
В настоящее время все отечественные суда снабжаются 127-миллиметровым морским магнитным компасом. Он обладает достаточной точностью и надежностью показаний, прост в использовании, обслуживании и ремонте.
Морской магнитный 127-миллиметровый компас (рис. 15) состоит из следующих основных частей: защитного колпака 1, котелка 2 с картушкой, пеленгатора 3, нактоуза 4 и девиационного прибора 5.
Картушка (рис. 16) является главной частью компаса и состоит из системы магнитных стрелок 5, поплавка с латунным ободком 2, агатовой топки 3, винта 4 для крепления топки, диска 1 со шкалой, разбитой на румбы и градусы.
Магнитная система картушки собрана из шести стрелок круглого сечения диаметром, равным 2,5 мм. Стрелки делаются попарно одинаковыми по длине, чтобы концы всех стрелок находились на одной окружности. Для предохранения от ржавчины магнитные стрелки помещают в герметически запаянные медные пенальчики. Поплавок изготавливают из тонкой листовой латуни, он имеет форму полусферы. Обладая запасом плавучести, он значительно уменьшает массу картушки в.компасной жидкости, а следовательно и давление картушки на поддерживающую ее шпильку. Масса картушки в компасной жидкости равна 4±0,5 г, а в воздухе —105 г. Топку изготовляют цилиндрической формы из агата. Снизу в топке делают углубление, которым она надевается на острие компасной шпильки. Топка крепится винтом в сквозном отверстии поплавка. В нижней части отверстие имеет расширение для того, чтобы картушка могла наклоняться при качке судна. Диск изготовляют из тонкой листовой слюды и на него наклеивают бумажную градуированную шкалу.
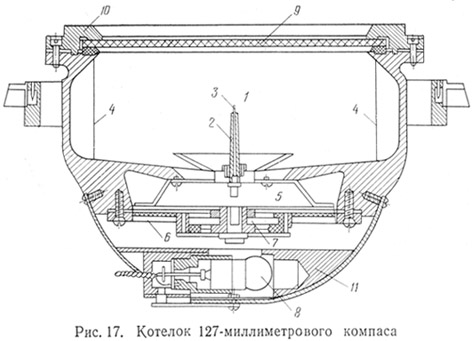 Котелок (рис. 17) представляет собой латунный цилиндрический резервуар, разделенный внутри горизонтальной переборкой на две камеры и заполненный компасной жидкостью. В верхней основной камере 1 установлена конусовидная латунная колонка 2 с компасной шпилькой 3, на которую надевается своей топкой картушка. На верхний конец шпильки напаивают кусочек очень прочного металла — ирридия или стеллита. Внутри верхней камеры установлены носовая и кормовая курсовая нити 4 из вычерненной латунной проволоки. При установке котелка на судне они должны располагаться в диаметральной плоскости судна. Носовая курсовая нить является индексом для отсчета курса судна.
Котелок (рис. 17) представляет собой латунный цилиндрический резервуар, разделенный внутри горизонтальной переборкой на две камеры и заполненный компасной жидкостью. В верхней основной камере 1 установлена конусовидная латунная колонка 2 с компасной шпилькой 3, на которую надевается своей топкой картушка. На верхний конец шпильки напаивают кусочек очень прочного металла — ирридия или стеллита. Внутри верхней камеры установлены носовая и кормовая курсовая нити 4 из вычерненной латунной проволоки. При установке котелка на судне они должны располагаться в диаметральной плоскости судна. Носовая курсовая нить является индексом для отсчета курса судна.
Нижняя, или дополнительная, камера 5 служит для компенсации объема компасной жидкости при изменении температуры. Верхняя камера соединена с нижним отверстием, через которое перетекает компасная жи





