В цифровой системе передачи информации с радиосигналом КИМ-ЧМ необходимо оценить точность передачи сообщения и выбрать основные параметры радиолинии, определяющие точность. Известно, что в системе непрерывно принимаются сообщения. В приемном устройстве применяется прием “в целом”.
Необходимо знать - скорость передачи информации R (двоичных единиц в секунду), энергетический потенциал радиолинии, закон изменения несущей частоты из-за нестабильности передатчика и движения передающего и принимающего пунктов. Предполагается также, что символы в КИМ сигнале могут считаться независимыми, а априорная вероятность появления нуля и единицы одинакова.
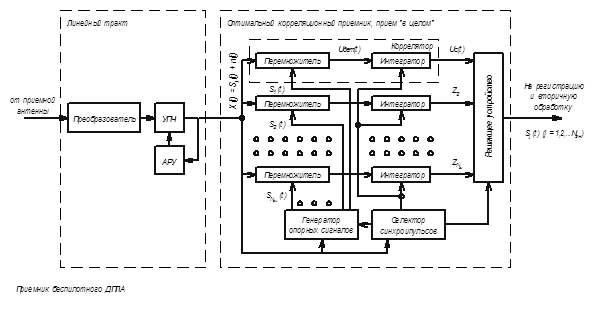
Рисунок 1. Функциональная схема приемника беспилотного ДПЛА
В приемном устройстве после преобразования и усиления происходит оптимальный прием “в целом”. Функциональные схемы оптимальных приемников приведены на Рисунок 1. Оптимальный приемник вычисляет взаимную корреляцию принятого сигнала  с каждым из возможных сигналов
с каждым из возможных сигналов  и выносит решение о приеме того сигнала, для которого указанная величина имеет наибольшее значение. Схема оптимального приемника содержит
и выносит решение о приеме того сигнала, для которого указанная величина имеет наибольшее значение. Схема оптимального приемника содержит  активных корреляторов. В этом случае имеется генератор опорных сигналов . В состав приемника входит также устройство синхронизации, с помощью которого обеспечивается синхронизация принимаемых и опорных сигналов, а также разряд интегратора после окончания кодового слова. Опорное напряжение вырабатывает система ФАП. При оценке помехоустойчивости оптимального приемника параметры входного сигнала считаются полностью известными. Такой приемник известен под названием корреляционного (или когерентного) приемника. Опорные сигналы поступают на корреляторы одновременно с принятым сигналом . Коррелятор состоит из перемножителя сигналов и интегратора. В момент окончания принятого сигнала выходное напряжение корреляторов определяется как
активных корреляторов. В этом случае имеется генератор опорных сигналов . В состав приемника входит также устройство синхронизации, с помощью которого обеспечивается синхронизация принимаемых и опорных сигналов, а также разряд интегратора после окончания кодового слова. Опорное напряжение вырабатывает система ФАП. При оценке помехоустойчивости оптимального приемника параметры входного сигнала считаются полностью известными. Такой приемник известен под названием корреляционного (или когерентного) приемника. Опорные сигналы поступают на корреляторы одновременно с принятым сигналом . Коррелятор состоит из перемножителя сигналов и интегратора. В момент окончания принятого сигнала выходное напряжение корреляторов определяется как
 , (
, ( ).
).
В качестве показателя точности основного тракта принимается вероятность неправильной оценки слова ( ). В качестве внешнего воздействия на систему будем рассматривать собственный шум приемника, заданный энергетическим потенциалом
). В качестве внешнего воздействия на систему будем рассматривать собственный шум приемника, заданный энергетическим потенциалом  .
.
Для сигнала КИМ-ЧМ перемножитель сделаем необычный. Функциональная схема перемножителя представлена на Рисунок 2.

Рисунок 2. Функциональная схема перемножителя КИМ-ЧМ
Частотный детектор построен на двух разнесенных фильтрах, каждый из которых настроен на свою частоту, передающую сигналы «1» и «0» соответственно. Фильтры согласованны с формой символа сигнала так, что на выходе фильтра огибающая символа становится треугольной. Предполагается, что разнос частот, на которые настроены фильтры, значительно превышает их полосы пропускания. Огибающие на выходе фильтров выделяются линейными амплитудными детекторами. Выходы детекторов вычитаются. Образующиеся разнополярные импульсы усиливаются в видеоусилителе линейно, если их абсолютная величина меньше уровня насыщения  . В противном случае, начиная с заданного уровня, модуль выходного напряжения видеоусилителя не увеличивается. Инвертор в свою очередь меняет полярность сигнал принятого с видеоусилителя, если эталонный сигнал
. В противном случае, начиная с заданного уровня, модуль выходного напряжения видеоусилителя не увеличивается. Инвертор в свою очередь меняет полярность сигнал принятого с видеоусилителя, если эталонный сигнал  соответствует «0». Таким образом, при совпадении с на выходе перемножителя будут положительные импульсы, в ином случае перемножитель будет выдавать отрицательные импульсы. Далее энергия импульсов накапливается в интеграторе.
соответствует «0». Таким образом, при совпадении с на выходе перемножителя будут положительные импульсы, в ином случае перемножитель будет выдавать отрицательные импульсы. Далее энергия импульсов накапливается в интеграторе.
Основной тракт радиолинии
Анализ основного тракта радиолинии целесообразно начать с выяснения принципиальной возможности получить приемлемые результаты в заданных условиях. Дело в том, что энергетический потенциал и скорость передачи информации, значения которые заданы, уже определяют минимально возможную вероятность искажения символа. Если вероятность искажения символа окажется слишком большой, то не имеет смысла рассчитывать реальную радиолинию, которая, разумеется, будет еще хуже.
Вероятность ошибки при оценке слова в сигнале КИМ-ЧМ для оптимальной обработки при приеме “в целом” равна
 , (1)
, (1)
где  - отношение сигнла/шум,
- отношение сигнла/шум,  - энергия сигнала,
- энергия сигнала,  - мощность полезного сигнала КИМ-ЧМ,
- мощность полезного сигнала КИМ-ЧМ,  - длительность слова,
- длительность слова,  - спектральная плотность шума. После расчета ошибки по формуле (1) может оказаться необходимым потребовать изменить исходные условия — увеличить энергетический потенциал или уменьшить скорость передачи и только после этого приступить к расчету реальной радиолинии.
- спектральная плотность шума. После расчета ошибки по формуле (1) может оказаться необходимым потребовать изменить исходные условия — увеличить энергетический потенциал или уменьшить скорость передачи и только после этого приступить к расчету реальной радиолинии.
Система синхронизации
В цифровых радиолиниях необходимо применять кадровую при синхронной передаче, а также пословную синхронизации. В случае посимвольного приема дополнительно требуются сигналы посимвольной синхронизации. С помощью соответствующих синхронизирующих сигналов осуществляется разделение каналов и обеспечивается правильная работа декодирующих устройств командных сигналов. В нашем случае сигнал будет иметь следующий вид.

Рисунок 3 Структура демодулированного сигнала
Кадровая синхронизация. Синхронизирующее слово, ставящееся в начале каждого кадра, называется словом кадровой синхронизации. В качестве слов кадровой синхронизации часто используются составные сигналы, причем выделение этих слов в приемнике осуществляется с помощью пассивного согласованного фильтра (Рисунок 4). Напряжение на выходе согласованного фильтра воспроизводит автокорреляционную функцию синхронизирующего сигнала. Для уменьшения ошибок, возникающих при обнаружении синхронизирующего сигнала и определении его временного положения, автокорреляционная функция данного сигнала должна иметь узкий центральный пик и малый уровень «боковых» выбросов. Подобным свойством обладает ряд широкополосных сигналов, в том числе сигналы, сформированные на основе некоторых двоичных кодов.

Рисунок 4 Устройство декодирования кадрового синхронизирующего сигнала
Принятый синхронизирующий видеосигнал, поступает на вход линии задержки. Расстояние между отдельными отводами этой линии соответствует длительности элементарных импульсов кода  . Максимальное время задержки синхронизирующего сигнала равно полной длительности сигнала
. Максимальное время задержки синхронизирующего сигнала равно полной длительности сигнала  . Сигналы, которые снимаются с отводов линии задержки, поступают на сумматор. При этом часть сигналов проходит через инверторы, изменяющие полярность сигналов. Пространственное расположение отводов линии задержки, к которым подключены инверторы, воспроизводит в обратном порядке временное положение символов «0», имеющихся в составе рассматриваемого синхронизирующего кодового слова. Тем самым обеспечивается синхронное накопление энергии отдельных импульсов этого слова в сумматоре. К выходу сумматора подключен фильтр, который согласован с одиночным видеоимпульсом длительности . В момент окончания принятого синхронизирующего кодового слова на выходе согласованного фильтра образуется короткий импульс значительной амплитуды. С помощью таких импульсов осуществляется запуск порогового устройства, предназначенного для выделения отдельных синхронизирующих сигналов.
. Сигналы, которые снимаются с отводов линии задержки, поступают на сумматор. При этом часть сигналов проходит через инверторы, изменяющие полярность сигналов. Пространственное расположение отводов линии задержки, к которым подключены инверторы, воспроизводит в обратном порядке временное положение символов «0», имеющихся в составе рассматриваемого синхронизирующего кодового слова. Тем самым обеспечивается синхронное накопление энергии отдельных импульсов этого слова в сумматоре. К выходу сумматора подключен фильтр, который согласован с одиночным видеоимпульсом длительности . В момент окончания принятого синхронизирующего кодового слова на выходе согласованного фильтра образуется короткий импульс значительной амплитуды. С помощью таких импульсов осуществляется запуск порогового устройства, предназначенного для выделения отдельных синхронизирующих сигналов.
На вход рассматриваемого согласованного фильтра поступает напряжение  , которое содержит как синхронизирующее, так и телеметрические сигналы. Воздействие на согласованный фильтр телеметрических слов сопровождается образованием дополнительных «выбросов» напряжения на выходе этого фильтра. Для предотвращения ложных срабатываний порогового устройства под действием таких выбросов коэффициенты взаимной корреляции между синхронизирующим сигналом и отдельными телеметрическими словами должны иметь незначительную величину.
, которое содержит как синхронизирующее, так и телеметрические сигналы. Воздействие на согласованный фильтр телеметрических слов сопровождается образованием дополнительных «выбросов» напряжения на выходе этого фильтра. Для предотвращения ложных срабатываний порогового устройства под действием таких выбросов коэффициенты взаимной корреляции между синхронизирующим сигналом и отдельными телеметрическими словами должны иметь незначительную величину.
В инерционной системе кадровой синхронизации сигналы, выделенные с помощью согласованного фильтра, могут использоваться для автоматической подстройки частоты местного генератора синхронизирующих сигналов. Постоянная времени инерционной системы значительно превышает длительность синхронизирующего сигнала . Следовательно, в установившемся режиме обеспечивается хорошая фильтрация помех, и высокая точность определения начала кадра. Недостатком инерционной системы является значительное время обнаружения слова кадровой синхронизации, а также возможность срыва слежения под действием помех.
Пословная синхронизация предназначается для определения границ отдельных команд в составе кадра. Существуют различные способы осуществления пословной синхронизации. Способ, который мы будем использовать, основан на использовании специальных разделительных сигналов (Рисунок 3 – заштрихованные импульсы). При синхронной непрерывной передаче сообщений разделительные сигналы имеют периодический характер, поэтому в спектре модулирующего сигнала радиолинии возникает регулярная составляющая на частоте следования слов сообщения  . После детектирования принятого радиосигнала эта составляющая выделяется с помощью узкополосного фильтра и используется для формирования сигналов пословной синхронизации. Такая система синхронизации является инерционной.
. После детектирования принятого радиосигнала эта составляющая выделяется с помощью узкополосного фильтра и используется для формирования сигналов пословной синхронизации. Такая система синхронизации является инерционной.
Посимвольная синхронизация используется при посимвольном приеме кодовых слов и обеспечивает разделение элементарных сигналов, соответствующих различным позициям кодового слова. Требования к точности посимвольной синхронизации зависят от используемого способа обработки элементарных информационных сигналов в приемнике. При обработке, близкой к оптимальной, а она в нашем случае именно такая, необходимо достаточно точное определение границ этих сигналов. Требования к точности синхронизации возрастают с уменьшением длительности элементарных сигналов.

Рисунок 5 Функциональная схема инерционной системы посимвольной синхронизации
Для выделения сигналов посимвольной синхронизации непосредственно используется последовательность принимаемых информационных символов. На Рисунок 5 показана функциональная схема инерционной системы посимвольной синхронизации. В результате дифференцирования сигнала , образуется последовательность импульсов, временное положение которых соответствует границам между соседними символами «1» и «0». Эта последовательность поступает на временной дискриминатор, который вырабатывает управляющее напряжение, пропорциональное временнóму рассогласованию между входной и опорной последовательностью импульсов. Последняя и используется в качестве сигналов посимвольной (тактовой) синхронизации. Опорная последовательность вырабатывается генератором синхронизирующих сигналов. С помощью управляющего напряжения изменяется частота следования импульсов опорной последовательности, тем самым обеспечивается автоматическая подстройка генератора синхронизирующих сигналов.
Анализ таких систем имеет целью определить флюктуации моментов временных меток относительно положения, соответствующих идеальной работе. В нашем случае мы будем считать, что система синхронизации работает идеально. В качестве показателя точности можно взять среднеквадратическую ошибку, которая для нормальной работы должна быть много меньше длительности одного символа.
Расчет






