СОДЕРЖАНИЕ
| Введение.........................................
| 2
|
| 1. Моделирование в среде MATLAB..................
| 5
|
| 1.1. SIMULINK – инструмент визуального моделирования ..............................................
| 5
|
| 1.2. Создание модели...............................
| 9
|
| 1.3. Моделирование в среде SIMULINK...............
| 11
|
| 1.4. Частотные характеристики.......................
|
|
|
|
|
|
|
|
| Лабораторная работа № 1. Математическое моделирование механической части электропривода...............
| 5
|
| Лабораторная работа № 2. Математическое моделирование электродвигателя постоянного тока независимого возбуждения......................................
| 10
|
| Лабораторная работа № 3. Математическое моделирование электромеханической системы с линейной механической характеристикой...............................
| 15
|
| Лабораторная работа № 4. Математическое моделирование электропривода постоянного тока.................
| 20
|
| Библиографический список..........................
| 28
|
ВВЕДЕНИЕ
Для дисциплины "Моделирование электропривода", которую студенты специальности 140604 "Электропривод и автоматика промышленных установок и технологических комплексов" очной формы обучения на базе среднего специального образования изучают в 4 семестре, курс лабораторных работ и курсовая работа составляют единый комплекс. Он предназначен для закрепления теоретического материала, приобретения навыков разработки математических моделей технических систем, получения временных и частотных характеристик, проведения сравнительного анализа адекватности используемой математической модели реальному техническому объекту. Комплекс служит практической и теоретической основой для последующего изучения таких дисциплин, как "Автоматизированное проектирование электроприводов", "Системы управления электроприводами".
Для выполнения лабораторных работ группа студентов должна быть разделена на подгруппы. В одной подгруппе не должно быть более 15 человек. В составе подгруппы студенты делятся на бригады (одна бригада – не более 2 человек). Студенты выполняют работы, приведенные в данных методических указаниях, побригадно по вариантам (табл. 1). Номер бригады является номером варианта. Полученные в лабораторных работах модели и характеристики используются в дальнейшем при выполнении курсовой работы.
Выполнению каждой лабораторной предшествует подготовительная работа, изложенная в задании для домашней подготовки. Бригада студентов получает допуск к лабораторной работе только при выполнении этого задания. После выполнения каждой лабораторной работы составляется один отчет на бригаду, на основании которого происходит защита выполненной работы.
Таблица 1
| Вариант №
| Параметры
|
| J2, кг*м2
| J3, кг*м2
| C12, H*м
| C23, H*м
| λ12
| λ23
| MC,
H*м
| εmax, с-1
| ω, с-1
|
| 1.
| 0.1
| 0.6
| 100
| 125
| 0.1
| 0.1
| 20
| 50
| 105
|
| 2.
| 0.2
| 0.5
| 125
| 150
| 0.15
| 0.15
| 40
| 50
| 105
|
| 3.
| 0.3
| 0.4
| 150
| 100
| 0.2
| 0.2
| 80
| 50
| 105
|
| 4.
| 0.1
| 0.7
| 150
| 125
| 0.1
| 0.1
| 20
| 75
| 157
|
| 5.
| 0.2
| 0.5
| 175
| 150
| 0.2
| 0.2
| 30
| 75
| 157
|
| 6.
| 0.3
| 0.3
| 200
| 175
| 0.3
| 0.3
| 40
| 75
| 157
|
| 7.
| 0.15
| 0.8
| 175
| 200
| 0.1
| 0.15
| 50
| 100
| 230
|
| 8.
| 0.2
| 0.9
| 200
| 150
| 0.2
| 0.2
| 75
| 100
| 230
|
| 9.
| 0.25
| 1.0
| 150
| 125
| 0.3
| 0.25
| 100
| 100
| 230
|
| 10.
| 0.3
| 1.1
| 250
| 200
| 0.15
| 0.1
| 30
| 125
| 262
|
| 11.
| 0.4
| 1.3
| 275
| 225
| 0.2
| 0.15
| 60
| 125
| 262
|
| 12.
| 0.5
| 1.4
| 300
| 250
| 0.25
| 0.3
| 90
| 125
| 262
|
| 13.
| 0.35
| 0.9
| 250
| 300
| 0.15
| 0.25
| 15
| 150
| 314
|
| 14.
| 0.45
| 1.2
| 225
| 250
| 0.25
| 0.2
| 30
| 150
| 314
|
| 15.
| 0.55
| 1.5
| 275
| 225
| 0.3
| 0.15
| 45
| 150
| 314
|
Курс выполнения лабораторных работ предполагает в качестве прикладного программного обеспечения использование комплекта программных средств MATLAB (версия 6.5) + Simulink + дополнительные пакеты расширения [1, 6, 7]. Необходимые для выполнения лабораторных работ расчеты также рекомендуется выполнять с использованием прикладной программы MathCAD.
Список основной и дополнительной литературы, которой необходимо пользоваться при выполнении заданий, приведен в конце данных методических указаний. При анализе динамики необходимо выявлять соответствие частотных и временных характеристик, физическую сущность влияния варьируемых параметров на динамику системы, принципиальные отличия аналогичных графиков для разномассовых систем с объяснением физических причин выявленных отличий.
В сети Internet по адресу http://www.aits-mep.narod.ru находится электронный сайт, являющейся информационной поддержкой дисциплины "Моделирование электропривода". На этом сайте студенты, изучающие данный учебный курс, могут найти учебно-методические материалы, в частности, электронные версии учебных пособий [1, 2, 7] и данных методических указаний.
Создание модели
Для создания модели в среде SIMULINK (S-модели) необходимо последовательно выполнить ряд действий.
1. Создать новый файл модели с помощью команды File/New/Model, или используя кнопку  на панели инструментов (здесь и далее, с помощью символа “/”, указаны пункты меню программы, которые необходимо последовательно выбрать для выполнения указанного действия).
на панели инструментов (здесь и далее, с помощью символа “/”, указаны пункты меню программы, которые необходимо последовательно выбрать для выполнения указанного действия).
2. Расположить блоки в окне модели. Для этого необходимо открыть соответствующий раздел библиотеки (Например, Sources – Источники). Далее, указав курсором на требуемый блок и нажав на левую клавишу “мыши” – “перетащить” блок в созданное окно. Клавишу мыши нужно держать нажатой. Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу “мыши”), а затем нажать клавишу Delete на клавиатуре.
Для изменения размеров блока требуется выбрать блок, установить курсор в один из углов блока и, нажав левую клавишу “мыши”, изменить размер блока (курсор при этом превратится в двухстороннюю стрелку).
При выборе блока и нажатии правой клавиши мыши появляется контекстное меню, позволяющее выполнит ряд дополнительных операций с блоком.
3. Для параметрирования необходимо дважды щелкнуть левой клавишей “мыши” на изображение блока. При этом откроется окно редактирования параметров данного блока. Данные, как правило, задаются в виде однострочной матрицы. Численные значения разделяются символом “пробел”, при задании следует иметь в виду, что в качестве десятичного разделителя должна использоваться точка, а не запятая. В начале матрицы необходим символ “[”, в конце – символ “]” После внесения изменений нужно закрыть окно кнопкой OK.
Для примера на рис. 3 показан блок, моделирующий передаточную функцию и окно редактирования параметров этого блока, Numerator – массив коэффициентов числителя, Denominator – массив коэффициентов знаменателя.
Рис 3. Блок, моделирующий передаточную функцию и окно редактирования параметров блока
4. После установки на схеме всех блоков из требуемых библиотек нужно выполнить соединение элементов схемы. Для этого необходимо указать курсором на “выход” блока, а затем, нажать и, не отпуская левую клавишу “мыши”, провести линию к входу другого блока. После чего отпустить клавишу. В случае правильного соединения изображение стрелки на входе блока изменяет цвет. Для создания точки разветвления в соединительной линии нужно подвести курсор к месту предполагаемого узла и, нажав правую клавишу “мыши”, протянуть линию. Для удаления линии требуется выбрать линию (так же, как это выполняется для блока), а затем нажать клавишу Delete на клавиатуре.
5. После составления расчетной схемы необходимо сохранить ее в виде файла на диске, выбрав пункт меню File/Save As... в окне схемы и указав папку и имя файла. Следует иметь в виду, что имя файла не должно превышать 32 символа, должно начинаться с буквы и не может содержать символы кириллицы и спецсимволы. Это же требование относится и к пути файла (к тем папкам, в которых сохраняется файл). При последующем редактировании схемы можно пользоваться пунктом меню Fille/Save. При повторных запусках программы SIMULINK загрузка схемы осуществляется с помощью меню File/Open... в окне обозревателя библиотеки или из основного окна MATLAB.
Частотные характеристики
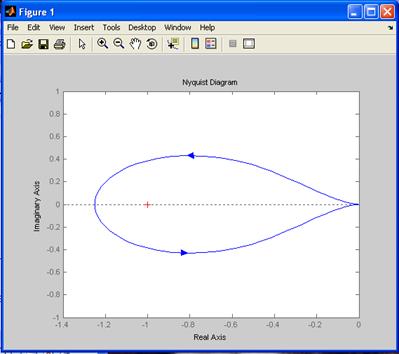
Рассмотрим составление частотных характеристик на конкретном примере:
Составим передаточную функцию разомкнутой системы:
Исследуем устойчивость системы с помощью годографа Найквиста:
>> num=[5]
>> den=[2 4 -4]
>> sys=tf(num,den)
Transfer function:
5
--------------------------
2 s^2 + 4 s - 4
>> nyquist(sys),
гдеnum - вектор или матрица коэффициентов числителя,
den– вектор коэффициентов знаменателя.
sys=tf(num,den) – вывод передаточной функции системы в среде MATLAB.
nyquist(sys) – функция вывода годографа Найквиста.
В результате получаем:
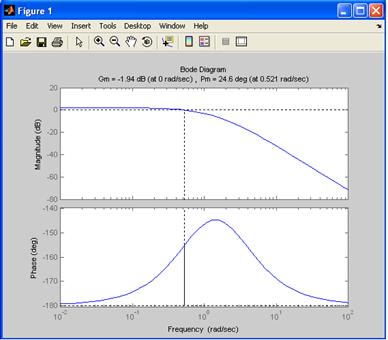
Определим устойчивость замкнутой системы по ЛАЧХ и ФЧХ разомкнутой САР:
>> bode(sys) – функция построения ЛАЧХ и ФЧХ
В результате, после нажатия клавиши «Enter» получим:
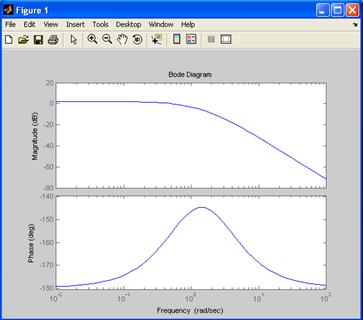
Получим
Лабораторная работа № 1
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
Цель работы: исследование динамических свойств механической части электропривода на примере двухмассовых и эквивалентных одномассовых расчетных схем.
Общие сведения и рекомендации. Механическая часть реального электропривода представляет собой многомассовую упругую механическую систему, в которой наличие упругих связей накладывает определенные особенности на протекание в ней динамических процессов, отличающихся от процессов в одномассовом звене.
Для описания динамических свойств механической системы наиболее универсальными являются уравнения движения в обобщенных координатах, то есть уравнения Лагранжа [1, 3]
 , (1)
, (1)
где Wк – запас кинетической энергии системы, выраженный через обобщенные координаты qi (угловые и линейные перемещения) и обобщенные скорости  (угловые или линейные скорости);
(угловые или линейные скорости);
Qi = dАi/dqi – обобщенная сила (момент или усилие), определяемая суммой элементарных работ dАi всех действующих сил на возможном перемещении dqi.
Число обобщенных координат, как и число уравнений Лагранжа, описывающих динамические характеристики объекта моделирования, соответствует числу степеней свободы объекта, в данном случае – механической системы.
При наличии в кинематической схеме механической части электропривода передаточных устройств, обеспечивающих согласование форм или скоростей движения исполнительного органа с двигателем, целесообразно привести переменные и параметры механической системы к валу двигателя [1, 2, 3]. Это позволяет получить расчетную схему, дающую наглядное представление о реальном влиянии действующих масс, жесткостей на динамические свойства механический части электропривода (МЧ ЭП). Кроме того, в этом случае значительно проще составить систему уравнений Лагранжа, представляющую математическую модель исследуемого объекта.
На рис. 1 показана расчетная схема трехмассовой последовательной упругой системы, в которой обобщенными координатами являются угловые перемещения масс j1, j2, j3, и соответствующие им обобщенные угловые скорости w1, w2, w3. Статические моменты, обусловленные силами трения в элементах кинематической цепи первой (J1) и второй (J2) масс, ввиду их малости приняты равными нулю. В расчетной схеме действуют: М – момент двигателя, M12, М23 – моменты упругой деформации, Мс – статический момент исполнительного органа рабочей машины. Кроме того, на схеме приведены: C12, С23 – жесткости упругих связей между массами, b12, b23 – коэффициенты внутреннего вязкого трения. Согласно расчетной схеме с помощью уравнений Лагранжа по методике, изложенной в [1, 2, 3], составляется система дифференциальных уравнений, ко-
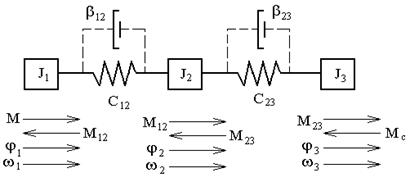
Рис. 1. Расчетная схема трехмассовой
последовательной упругой системы
торая является основой для составления структурной схемы системы и исследования динамических характеристик с помощью прикладных программ.
На практике чаще используют эквивалентную расчетную схему двухмассовой упругой системы (рис. 2), к которой приводят трехмассовую механическую систему, или одномассовую математическую модель, которая получается, если в двухмассовой модели положить  . Правила приведения изложены в [1, 2, 3]. Однако при получении эквивалентных расчетных схем теряются некоторые особенности исследуемого объекта, на что следует обратить внимание при моделирования механических систем [3].
. Правила приведения изложены в [1, 2, 3]. Однако при получении эквивалентных расчетных схем теряются некоторые особенности исследуемого объекта, на что следует обратить внимание при моделирования механических систем [3].
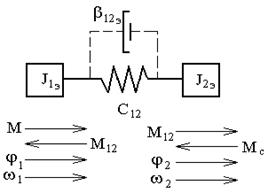
Рис. 2. Эквивалентная расчетная схема двухмассовой
упругой механической системы
Задание для домашней подготовки
1. Пользуясь данными в табл. 1 и номером бригады, выбрать двигатель постоянного тока независимого возбуждения для заданного механизма с учетом обеспечения допустимых технологических ускорений.
2. Составить математическое описание и структурную схему заданного механизма в абсолютных величинах.
3. Провести приведение исходной трехмассовой механической системы к эквивалентным двухмассовой и одномассовой моделям, составить для них математическое описание и структурные схемы в абсолютных единицах.
4. Ознакомиться с направленным нормированием структурных схем МЧ ЭП при наличии упругости [1, 3, 4].
5. Осуществить направленное нормирование математических моделей одномассовой и двухмассовой систем с упругостью первого рода.
6. Провести анализ устойчивости двухмассовой системы с учетом коэффициента соотношения масс  .
.
Задание к работе.
1. Набрать структурную схему эквивалентной двухмассовой механической части и снять частотные и временные характеристики w1(t), w2(t), М12(t), при ступенчатом управляющем воздействии.
2. Набрать нормированную модель двухмассовой системы с упругостью и выполнить работы, аналогичные п. 1.
3. Набрать структурную схему эквивалентной одномассовой механической части и снять частотную и временную характеристику w(t) при ступенчатом управляющем воздействии.
4. Набрать нормированную модель одномассовой системы с упругостью и выполнить работы, аналогичные п. 3.
5. Выполнить сравнительный анализ частотных и временных характеристик одно- и двухмассовой механических систем и выявить отличительные признаки между ними.
7. Осуществить варьирование параметров двухмассовой механической системы и выявить их влияние на частотные и временные характеристики объекта моделирования, изменяя параметры МЧ ЭП. J2 и C12 изменить в пределах (1..3)·J2 и (0.5...l.5)·C12 при числе исследуемых значений не менее трех.
Отчет должен содержать:
1. Цель работы.
2. Расчетную и структурную схемы (математическую модель) трехмассовой механической системы. Приведение параметров трехмассовой расчетной схемы к эквивалентной двухмассовой. Математические модели двухмассовой механической системы в абсолютных и нормированных единицах.
3. Частотные и временные характеристики двухмассовой эквивалентной механической системы. Анализ характеристик и выводы.
4. Приведение параметров двухмассовой расчетной схемы к эквивалентной одномассовой. Математические модели одномассовой механической системы в абсолютных и нормированных единицах.
5. Частотные и временные характеристики одномассовой эквивалентной механической системы. Анализ характеристик и выводы.
6. Сравнительный анализ частотных и временных характеристик одно- и двухмассовых систем, отличительные признаки.
7. Исследование влияния параметров двухмассовой механической системы на ее частотные и временные характеристики.
8. Анализ устойчивости двухмассовой системы.
9. Выводы по работе.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Назначение, виды и отличительные признаки расчетных схем механической части электропривода.
2. Понятие о математической модели объекта; требования, предъявляемые к математической модели.
3. С какой целью осуществляется направленное нормирование структурных схем?
4. Как выбираются базовые величины при направленном нормировании структурных схем?
5. Какая связь существует между частотными и временными характеристиками моделируемого объекта? Пояснить на примере проведенного моделирования.
6. Как влияют параметры двухмассовой упругой механической части электропривода на частотные и временные характеристики моделируемого объекта?
7. Принципиальные отличия частотных характеристик двух- и одномассовых механических систем.
Лабораторная работа № 2
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Цель работы: исследование динамических свойств двигателя постоянного тока независимого возбуждения, выявление влияния параметров двигателя и нагрузки на динамику электродвигателя, получение навыков построения динамических характеристик при ненулевых начальных условиях.
Общие сведения и рекомендации. Электрические машины постоянного тока представляют собой электромеханические преобразователи (ЭМП) электрической энергии в механическую и наоборот и подчиняются общим законам электромеханического преобразования энергии [2, 3]. Принципиальная электрическая схема двигателя изображена на рис. 3, где показаны: обмотка дополнительных полюсов (ДП), компенсационная обмотка (КО), являющиеся вспомогательными в машине, поэтому при математическом описании принимаются во внимание только их электрические параметры. Влияние вихревых токов в крупных машинах при изменении магнитного потока учитывается обмоткой ОВТ. К числу основных обмоток, участвующих в электромеханическом преобразовании энергии, относятся: обмотка якоря (ОЯ) и обмотка возбуждения (ОВ).

Рис. 3. Принципиальная электрическая схема двигателя постоянного тока независимого возбуждения
Физические процессы, протекающие в цепи якоря, описываются уравнением
 , (2)
, (2)
где  = Rя+Rдп + Rko – активное сопротивление цепи якоря, Ом;
= Rя+Rдп + Rko – активное сопротивление цепи якоря, Ом;
 = Lя+Lдп+Lко – индуктивность цепи якоря, Гн;
= Lя+Lдп+Lко – индуктивность цепи якоря, Гн;
Ф – магнитный поток обмотки возбуждения, Вб;
 – конструктивный коэффициент, где pп – число пар полюсов, N – число активных проводников, а – число пар параллельных ветвей обмотки якоря;
– конструктивный коэффициент, где pп – число пар полюсов, N – число активных проводников, а – число пар параллельных ветвей обмотки якоря;
w – угловая скорость якоря, с-1.
Уравнение механического движения электродвигателя (ЭД) имеет вид
 , (3)
, (3)
где М, Мc – соответственно момент двигателя и статический момент, приведенный к валу двигателя, Н·м;
J – момент инерции двигателя, кг·м2.
По уравнениям (2) и (3) составляется структурная схема двигателя постоянного тока независимого возбуждения, которая позволяет исследовать его динамические свойства при Ф = const [1, 2, 3].
В процессе исследования необходимо выявить влияние параметров двигателя и нагрузки на характер протекающих процессов. Этому способствует знание динамической механической характеристики двигателя [3], которую целесообразно исследовать путем введения периодической составляющей в нагрузку, поскольку в этом случае динамическая механическая характеристика для каждого цикла установившихся колебаний одинакова, а форма ее всецело зависит от параметров двигателя. Важным показателем при исследовании динамических свойств двигателя является также динамическая жесткость его механической характеристики. Динамическая жесткость позволяет оценить отклонение динамической характеристики от статической при изменении нагрузки скачком или в установившихся колебательных режимах.
Динамические механические характеристики представляют собой параметрический график зависимостей ω = f(t) и M = f(t), построенной в осях ω (ось Y – ось ординат) и М (ось X – ось абсцисс), соответственно, где время t является параметром.
Задание для домашней подготовки
1. Для выбранного двигателя постоянного тока независимого возбуждения (см. п. 1 задания для домашней подготовки к лабораторной работе № 1) составить математические модели, описывающие динамику двигателя в режимах пуска, реверса и наброса нагрузки.
2. По математическим моделям выполнить структурные схемы ДПТ НВ, рассчитав соответствующие параметры.
3. Изучить теоретический материал по математическому моделированию двигателя постоянного тока независимого возбуждения, по динамической механической характеристике ДПТ НВ и динамической жесткости [2, 3].
4. Определить параметры системы и выполнить необходимые преобразования Лапласа для построения динамических механических характеристик (см. задание к лабораторной работе, п. 2, 3).
5. Провести анализ устойчивости ДПТ НВ с помощью критерия Найквиста, представленного в форме диаграмм Боде. Определить условия представления математической модели ДПТ НВ апериодическим звеном второго порядка.
Задание к работе
1. Набрать структурную схему двигателя постоянного тока независимого возбуждения и снять частотные и временные характеристики для ступенчатого управляющего и возмущающего воздействий.
2. Используя значение полученного в лабораторной работе № 1 суммарного момента инерции  , построить для одномассовой механической части следующие динамические механические характеристики:
, построить для одномассовой механической части следующие динамические механические характеристики:
2.1. Пуск двигателя при активном статическом моменте Мс = const.
2.2. Плавный пуск ЭД с ускорением  .
.
2.3. Реверс ЭД при активном статическом моменте с ускорением  .
.
3. Исследовать временные характеристики двигателя при его работе на естественной механической характеристике (ЕМХ) и введении в статическую нагрузку периодической составляющей различной частоты, то есть  , где
, где  , Mc = Мн. В качестве W целесообразно взять частоту собственных колебаний двигателя Wсв, а две другие должны отличаться наполовину от Wсв в большую и меньшую сторону как на ЕМХ, так и при варьировании величин активного сопротивления резистора или индуктивности в цепи якоря двигателя. Число значений параметров активных резисторов, включаемых в цепь якоря, должно быть не менее трех и обеспечивать изменение жесткости статической характеристики в три раза по отношению к естественной. Дополнительные индуктивности в цепи якоря следует выбирать стандартными, удовлетворяющими условиям нагрева. Значение суммарной индуктивности цепи якоря
, Mc = Мн. В качестве W целесообразно взять частоту собственных колебаний двигателя Wсв, а две другие должны отличаться наполовину от Wсв в большую и меньшую сторону как на ЕМХ, так и при варьировании величин активного сопротивления резистора или индуктивности в цепи якоря двигателя. Число значений параметров активных резисторов, включаемых в цепь якоря, должно быть не менее трех и обеспечивать изменение жесткости статической характеристики в три раза по отношению к естественной. Дополнительные индуктивности в цепи якоря следует выбирать стандартными, удовлетворяющими условиям нагрева. Значение суммарной индуктивности цепи якоря  следует увеличить в два и в три раза, относительно индуктивности обмотки якоря .
следует увеличить в два и в три раза, относительно индуктивности обмотки якоря .
Отчет должен содержать:
1. Математическое описание и структурную схему двигателя постоянного тока независимого возбуждения. Анализ модели ДПТ НВ согласно п. 5 задания для домашней подготовки.
2. Предварительные расчеты для построения структурной схемы и проведения лабораторных исследований.
3. Результаты исследований динамических характеристик ДПТ НВ и анализ влияния параметров на динамику двигателя.
4. Динамические механические характеристики двигателя для проведенных исследований и их анализ.
5. Выводы по работе.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Как влияет соотношение постоянных времени Тм/Та на частотные и временные характеристики ДПТ НВ?
2. Что определяет собственная частота колебаний двигателя?
3. Охарактеризуйте каналы управления ДПТ НВ на основе полной структурной схемы двигателя и при Ф = const.
4. Понятие о динамической механической характеристике двигателя и ее назначении. Каким образом осуществляется ее построение?
5. Как влияют параметры цепи якоря на динамическую механическую характеристику?
6. Как влияет частота вынужденных колебаний нагрузки на динамическую механическую характеристику?
7. Понятие о динамической жесткости механической характеристики и ее назначении.
8. Как влияют параметры цепи якоря на динамическую жесткость механической характеристики ДПТ НВ?
9. Как влияет изменение статической жесткости на частотные характеристики двигателя?
10. Проанализируйте устойчивость ДПТ НВ.
Лабораторная работа № 3
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ С ЛИНЕЙНОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ
Цель работы: исследование динамических свойств электропривода по системе тиристорный преобразователь – двигатель постоянного тока независимого возбуждения, работающего по разомкнутому циклу.
Общие сведения и рекомендации. Для реализации указанной цели лабораторной работы нужно, прежде всего, ознакомиться с математическим описанием и структурными схемами разомкнутых электромеханических систем (ЭМС), изложенными в [1, 2, 3], обратив особое внимание на обобщенную ЭМС с линеаризованной механической характеристикой.
В структурную схему исследуемой электромеханической системы входит двигатель постоянного тока независимого возбуждения (ДТП НВ), двухмассовая упругая механическая часть, рассмотренные ранее, и тиристорный преобразователь в качестве регулируемого источника напряжения.
Тиристорный преобразователь характеризуется своими регулировочными и внешними характеристиками в режимах непрерывного и прерывистых токов, коэффициентом усиления, динамическими характеристиками в переходных процессах. Входной координатой тиристорного преобразователя (ТП) является напряжение управления (Uy), выходной координатой – выпрямленная ЭДС, величина которой обозначается в установившемся режиме (Ed), а в переходных процессах (ed). Управляющие свойства ТП определяются характеристиками управления Ed = f(Uy). Внутренняя координата ТП – угол отпирания α определяется характеристикой системы импульсно-фазового управления (СИФУ) в виде математического описания α = fy(Uy), а внешняя координата – математическим описанием характеристики вентильной группы Ed = fвг(α). Результирующая характеристика управления ТП представляет собой функцию Ed = fвг[fy(Uy)] = f(Uy). Поскольку для всех ТП характеристики управления вентильных групп одинаковы, то вид результирующей характеристики ТП будет зависеть от характеристики СИФУ, которая определяется формой опорного напряжения: косинусоидальной или пилообразной [1, 2].
Динамические свойства тиристорного преобразователя определяются неполной управляемостью тиристоров и параметрами сети, ведущей преобразователь. В зависимости от исполнения СИФУ и его инерционности тиристорный преобразователь для линейного участка характеристики управления представляется передаточными функциями вида:
 , (4)
, (4)
 , (5)
, (5)
 , (6)
, (6)
где kп, Тп – соответственно, коэффициент усиления и постоянная времени тиристорного преобразователя, Тп = 0,01…0,015 с;
τп – чистое запаздывание, τп = 0,007…0,015 с.
Математическое описание динамических процессов, протекающих в управляемом выпрямителе, является многовариантным, зависящим от требуемой степени адекватности, определяемой задачами конкретного исследуемого электропривода. Для выбора типа математической модели ТП вводится показатель Кр, равный отношению длительности переходного процесса в системе автоматического управления к длительности проводимости отдельного вентиля.
При Кр < 10 применяют импульсные модели (6), при Кр < 30 – непрерывные нелинейные модели (5) и при Кр > 30 – упрощенные непрерывные модели (4). Чем большее значение имеет показатель Кр, тем менее точной моделью ТП можно воспользоваться при исследовании динамических процессов электропривода. Учитывая значения Кр для промышленных электроприводов, чаще применяют непрерывные модели тиристорных преобразователей.
Полагая первоначально механические связи абсолютно жесткими ( ), следует получить передаточные функции системы по управляющему и возмущающему воздействиям. Поскольку корни характеристического уравнения системы зависят от соотношения постоянных времени, то целесообразно при домашней подготовке определить характер переходных процессов, подлежащей исследованию ЭMC, сравнив позднее эти расчеты с результатами лабораторных исследований согласно п. 2.
), следует получить передаточные функции системы по управляющему и возмущающему воздействиям. Поскольку корни характеристического уравнения системы зависят от соотношения постоянных времени, то целесообразно при домашней подготовке определить характер переходных процессов, подлежащей исследованию ЭMC, сравнив позднее эти расчеты с результатами лабораторных исследований согласно п. 2.
Задание для домашней подготовки
1. Подготовить математическое описание и структурную схему тиристорного преобразователя.
2. Подготовить математическую модель и структурную схему регулируемого электропривода постоянного тока с одномассовой механической частью.
3. Подготовить математическую модель и структурную схему регулируемого электропривода постоянного тока с двухмассовой упругой механической частью.
4. Изучить теоретический материал по анализу устойчивости нелинейных систем при наличии звеньев чистого запаздывания, руководствуясь методами теории автоматического управления [5].
Задание к работе
1. Набрать структурную схему регулируемого электропривода, состоящую из тиристорного преобразователя, электродвигателя и одномассовой механической части (МЧ), и исследовать частотные и временные характеристики по управляющему и возмущающему воздействиям по каналам ω, Iя, Етп.
2. Набрать структурную схему регулируемого электропривода с двухмассовой упругой механической частью и снять частотные и временные характеристики при ступенчатом управляющем и возмущающем воздействиях по каналам Етп, Iя, M12, ω1, ω2.
3. Построить временные характеристики для двух- и одномассовой МЧ по каналам, указанным в пп. 1 и 2, при наличии периодической составляющей в нагрузке (по аналогии с п.3 лабораторной работы № 2, только в качестве W целесообразно взять собственную частоту колебаний двухмассовой системы W12).
4. Исследовать временные характеристики Iя, M12, ω1, ω2 при линейном изменении во времени управляющего воздействия, обеспечивая допустимое ускорение εmax в период пуска до заданной скорости привода при отсутствии и наличии периодической составляющей в Mc на валу исполнительного органа (см. п.3 задания к данной лабораторной работе).
Отчет должен содержать:
1. Цель работы.
2. Математическое описание и структурную схему тиристорного преобразователя. Частотные и временные характеристики ТП при ступенчатом управляющем и возмущающем воздействиях. Анализ характеристик и выводы.
3. Математическое описание и структурную схему электропривода по системе ТП-ДПТ НB с одномассовой механической частью. Частотные и временные характеристики системы TП-ДТП НВ с одномассовой МЧ по каналам Iя, ω, Етп при ступенчатом управляющем и возмущающем воздействиях. Анализ характеристик и выводы.
4. Математическое описание и структурную схему системы ТП - ДТП НВ с двухмассовой упругой механической частью. Частотные и временные характеристики системы ТП-ДПТ НВ двухмассовой упругой механической частью по каналам Етп, Iя, M12, ω1, ω2 при ступенчатом управляющем и возмущающем воздействиях. Анализ характеристик и выводы.
5. Временные характеристики координат при гармоническом возмущающем воздействии (п.3 задания к данной лабораторной работе).
6. Временные характеристики Iя, M12, ω1, ω2 при линейном изменении во времени управляющего воздействия при отсутствии и наличии периодической составляющей в статическом моменте на валу исполнительного органа. Анализ характеристик и выводы.
7. Общие выводы по работе.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Как выглядят частотные и временные характеристики тиристорного преобразователя при ступенчатом управляющем и возмущающем воздействиях?
2. Какие математические модели существуют для описания тиристорного преобразователя постоянного тока? Охарактеризуйте критерии выбора той или иной модели.
3. Как влияют электромагнитная и электромеханическая постоянные времени на динамические характеристики электропривода с одномассовой механической частью?
4. Физический процесс демпфирования механических колебаний электроприводом с линейной механической характеристикой в двухмассовой механической части.
5. Как влияет периодическая составляющая в статическом моменте на динамику электропривода с двухмассовой механической частью?
6. Способы снижения амплитуды механических колебаний в электроприводе с двухмассовой частью.
7. Что понимается под прямой оценкой колебательности системы и как она вычисляется?
8. Косвен