Степень подвижности механизма определяется по формуле Чебышева.

Где: n – число подвижных звеньев; р1 – число одноподвижных кинематических пар; р2 – число двухподвижных кинематических пар.
Предварительно необходимо определить число и названия подвижных звеньев; число и вид кинематических пар. Данные о кинематических парах занести в таблицу 1:
Таблица 1
| обозначение КП
| Шифр КП
| номера звеньев, образующих КП
| характер относительного движения звеньев КП
| класс КП
|
Для определения класса механизма необходимо произвести структурный анализ механизма — это значит установить, из каких структурных групп (первичного механизма и групп Ассура) состоит данный механизм и в какой последовательности эти группы присоединяются друг к другу. Класс механизма в целом определяется классом самой сложной его структурной группы. Последовательность присоединения групп называется формулой строения механизма и записывается в виде:
ПМ (0;1)→ Гр II (2;3) → Гр II (4;5)
Пример: определить степень подвижности и класс механизма.
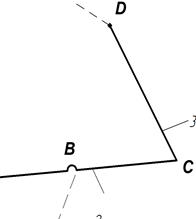
Механизм имеет пять подвижных звеньев. Названия звеньев: 1 – кривошип; 2 – шатун; 3 – коромысло; 4 – шатун; 5 – ползун. Стойка принята за нулевое звено. Звенья соедине ны между собой семью одноподвижными кинематическими парами. Данные о кинематических парах сводим в таблицу (1.1).
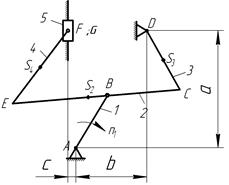
Рис. 1.1
Таблица 1.1
| обозначение КП
| Шифр КП
| номера звеньев, образующих КП
| характер относительного движения звеньев КП
| класс КП
|
| А
| [1В]
| О и 1
| вращательное
| V
|
| В
| [1В]
| 1 и 2
| вращательное
| V
|
| С
| [1B]
| 2 и 3
| вращательное
| V
|
| D
| [1B]
| 3 и О
| вращательное
| V
|
| Е
| [1B]
| 3 и 4
| вращательное
| V
|
| F
| [1B]
| 4 и 5
| вращательное
| V
|
| G
| [1П]
| 5 и О
| поступательное
| V
|
Определяем подвижность механизма по формуле:

где n = 5 - число подвижных звеньев; p 1 = 7 — число одноподвижных кинематических пар; р2 = 0 - число двухподвижных кинемати ческих пар. Тогда: 
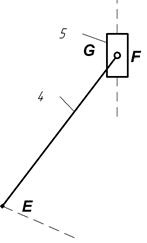
Раскладываем механизм на структурные группы. Прежде всего, отсоединяем группу Ассура, состоящую из звеньев 4 и 5 и трех кинематических пар: вращательных F и Е и поступательной G.
Степень подвижности этой группы после присоединения к стойке: 
 Группа 4 – 5 является группой II класса II порядка.
Группа 4 – 5 является группой II класса II порядка.
 Затем отсоединяем группу, состоящую из звеньев 2 и 3 и трех вращательных пар В, С и D. Степень подвижности этой группы после присоединения к стойке:
Затем отсоединяем группу, состоящую из звеньев 2 и 3 и трех вращательных пар В, С и D. Степень подвижности этой группы после присоединения к стойке:

Это группа II класса II порядка.
После отсоединения указанных групп
остался первичный механизм, состоящий
из кривошипа 1, присоединенного к
стойке кинематической парой А и
обладающий степенью подвижности

В целом рассматриваемый механизм является механизмом II класса. Формула строения механизма имеет вид:
ПМ (0;1)  II (2;3) II (4;5)
II (2;3) II (4;5)
1.2. Построение планов положений механизма
В верхнем левом углу чертежа строятся планы положений механизма для двенадцати положений. За начальное следует принять положение кривошипа  , соответствующее одному из крайних положений ползуна. Точкам, соответствующим этому положению приписывается индекс «1» или «0». Нумерация точек для последующих положений механизма производится по направлению вращения кривошипа.
, соответствующее одному из крайних положений ползуна. Точкам, соответствующим этому положению приписывается индекс «1» или «0». Нумерация точек для последующих положений механизма производится по направлению вращения кривошипа.
Так как кривошип вращается с постоянной угловой скоростью, то при выполнении построений окружность радиуса делится 12 равных частей. Планы положений механизмов второго класса строятся методом засечек в последовательности, соответствующей формуле строения механизма. Положение механизма, для которого выполняются кинематический и силовой расчеты, обводится утолщенной линией, все остальные построения выполняются в тонких линиях.
Для построения планов положений необходимо выбрать масштабный коэффициент длин, который определяется по формуле:

 (1.1)
(1.1)
где:  – действительная длина звена в метрах; – изображающий ее отрезок на чертеже в
– действительная длина звена в метрах; – изображающий ее отрезок на чертеже в  .
.
Шатунная кривая (траектория) точки  2 обводится жирной линией.
2 обводится жирной линией.
Пример: построить 12 планов положений механизма (рис. 1.1) и шатунную кривую т. S 2, если размеры звеньев: lAB =0,35 м; lBC = 0,75м; lCD = lCE =1,45 м; lEF =1,35м; lBS 2 =0,15 м; lCS 3 =0,7 м; lFS 4 =0,75 м; a =1,25 м; b =0,35 м; c =0,4 м.
Для построения плана принимаем, что длину кривошипа lA B на схеме будет изображать отрезок A B, длина которого равна 35 мм. Тогда масштаб длин плана
Затем вычисляем длины остальных отрезков, которые будем откладывать на чертеже:
 ;
; 


Наносим на чертеже все неподвижные оси: шарниры А, D и линию движения ползуна F. Из точки А проводим окружность радиусом АВ, из точки D - дугу окружности радиусом CD. Разбиваем окружность радиуса АB на двенадцать равных частей. Используя метод засечек, строим первое, второе и все последующие положения механизма. За начальное положение принимаем положение кривошипа АВ0 , соответствующее крайнему верхнему положению ползуна F 0. Далее нумеруем положения кривошипа по направлению вращения.

Рис. 1.2
1.3. Построение плана скоростей.
Для построения плана скоростей и ускорений используется известное положение теоретической механики о том, что движение какой-либо точки звена может быть представлено как сложное, состоящее из двух движений: переносного и относительного. Согласно этому положению составляются векторные уравнения для первичного механизма и групп Ассура (в последовательности, соответствующей формуле строения механизма). Для скоростей:
 , (1.2)
, (1.2)
где  - скорость точки в переносном движении;
- скорость точки в переносном движении;  - относительная скорость.
- относительная скорость.
Для ускорений:

 (1.3)
(1.3)
где  - переносное ускорение; ar - относительное ускорение;
- переносное ускорение; ar - относительное ускорение;  - нормальная составляющая относительного ускорения;
- нормальная составляющая относительного ускорения;  - тангенциальная составляющая относительного ускорения.
- тангенциальная составляющая относительного ускорения.
Для определения скоростей и ускорений точек, лежащих на звеньях (например, центров масс звеньев) используется свойство подобия планов скоростей и ускорений.
При построении плана скоростей длину отрезка, изображающего скорость точки  кривошипа , рекомендуется принимать от 40 до 60 мм. Масштаб плана скоростей находится по формуле:
кривошипа , рекомендуется принимать от 40 до 60 мм. Масштаб плана скоростей находится по формуле:
 (1.4)
(1.4)
где:  - скорость точки
- скорость точки  ;
;  - отрезок, изображающий эту скорость на плане.
- отрезок, изображающий эту скорость на плане.
В расчетно-пояснительной записке приводятся все необходимые расчеты для построения плана скоростей, результаты расчетов сводятся в таблицу 1.2.
Таблица 1.2
| VB , м /c
| VC, м /c
| VCB, м /c
| VCD, м /c
| VE, м /c
| VF, м /c
| VFE, м /c
| VF, м /c
| VS2, м /c
| VS3, м /c
| VS4, м /c
| ω 2, рад /c
| ω 3, рад /c
| ω 4, рад /c
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
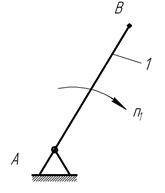
Пример: определить скорости точек и угловые скорости звеньев механизма (рис.1.2) для положения, выделенного утолщенной линией, если размеры звеньев: lAB =0,35 м; lBC = 0,75м; lCD = lCE =1,45 м; lEF =1,35м; lBS 2 =0,15 м; lCS 3 =0,7 м; lFS 4 =0,75 м; a =1,25 м; b =0,35 м; c =0,4 м; частота вращения кривошипа п1 =230 об/мин.
Определяем угловую скорость кривошипа АВ по формуле:

Из теоретической механики известно, что скорость какой - либо точки звена может быть представлена в виде векторной суммы переносной и относительной скоростей. Тогда абсолютная скорость точки В кривошипа АВ будет определятся:

где VA =0 - переносная скорость т. A, VB А - относительная скорость т. B во вращении вокруг т. А. Т. о., абсолютная скорость совпадает с относительной вращательной, поэтому скорость точки B находим по формуле:

Вектор VB направлен (рис. 1.3) перпендикулярно к оси звена A B в сторону его вращения. Масштаб плана скоростей:
Для определения скорости точки C воспользуемся векторными уравнениями:
 , (1)
, (1)
 . (2)
. (2)
В этих уравнениях скорость V B известна по величине и направлению, скорость V D =0. Относительные скорости V C В и V CD известны лишь по линии действия: V C В перпендикулярна к звену В C, V CD перпендикулярна к звену CD. Поэтому для определения скорости V C точки C через точку b плана (рис.1.3) проводим перпендикулярно звену BC линию действия скорости V C В, а через точку d, совпадающую с полюсом р плана скоростей, проводим перпендикулярно звену CD линию действия скорости V CD. На пересечении этих двух линий действия получим точку c — конец вектора скорости V C точки C:

Рис. 1.3
Согласно уравнению (1) вектор bc изображает относительную скорость V C В точки С во вращении вокруг точки В:

Согласно уравнению (2) вектор dc изображает относительную скорость V CD точки C во вращении вокруг точки D:


Согласно свойству планов скоростей находим положение точки e на плане исходя из пропорции:

Определив положение точки e на плане скоростей, находим величину скорости точки E:

Скорость точки F шатуна E F представляем в виде векторной суммы переносной и относительной скоростей. Для ее определения воспользуемся векторными уравнениями:
 (3)
(3)
 , (4)
, (4)
где FFE – относительная скорость вращения т. F вокруг т. E, направленная перпендикулярно шатуну FE; FF 0 – относительная скорость в поступательном движении т. F относительно неподвижной т. F 0.
Из плана скоростей определяем величину скорости:

Вектор ef определяет величину и направление относительной скорости:

Исходя из теоремы подобия находим на плане точки s2, s3, s4, соответствующие центрам тяжести звеньев S2, S3 и S4. Из полюса р в эти точки проводим векторы. Определяем величины скоростей центров тяжести:



Находим величину угловой скорости второго звена по формуле:
угловая скорость третьего звена:
угловая скорость  звена E F
звена E F
Направления угловых скоростей определяем направлением соответствующих векторов относительных скоростей.
1.4 Построение планов ускорений.
Масштаб плана ускорений определяется по формуле:
 (1.5)
(1.5)
где:  - ускорение точки ,
- ускорение точки ,  - отрезок, изображающий это ускорение на плане. Длину этого отрезка также рекомендуется принимать не менее 40
- отрезок, изображающий это ускорение на плане. Длину этого отрезка также рекомендуется принимать не менее 40  .
.
В расчетно-пояснительной записке приводятся все необходимые расчеты для построения плана ускорений, результаты расчетов сводятся в таблицу 1.3.
Таблица 1.3
| а B , м /c 2
| а C, м /c 2
| а CB, м /c 2
| а CD, м /c 2
| а E, м /c 2
| а F, м /c 2
| а FE, м /c 2
| а F, м /c 2
| а S2, м /c 2
| а S3, м /c 2
| а S4, м /c 2
| ε 2, рад /c 2
| ε 3, рад /c 2
| ε 4, рад /c 2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример: определить ускорения точек и угловые ускорения и звеньев механизма (рис.1.2) для положения, выделенного утолщенной линией, если размеры звеньев: lAB =0,35 м; lBC = 0,75м; lCD = lCE =1,45 м; lEF =1,35м; lBS 2 =0,15 м; lCS 3 =0,7 м; lFS 4 =0,75 м; a =1,25 м; b =0,35 м; c =0,4 м; частота вращения кривошипа п1 =230 об/мин.
Определим ускорение точки В. Поскольку звено АВ вращается равномерно  , где
, где  и
и  , то точка В имеет только нормальное ускорение, которое направлено по звену AВ к центру вращения. Величина этого ускорения:
, то точка В имеет только нормальное ускорение, которое направлено по звену AВ к центру вращения. Величина этого ускорения:

Принимаем длину отрезка р ' b ', изображающего вектор ускорения a B точки B, равной 70 мм (рис. 1.4) Тогда масштаб плана ускорений

Из произвольной точки р ', принятой за полюс плана ускорений, откладываем параллельно звену А B в направлении от точки B к точке A отрезок р ' b '.
Ускорения точек A и D механизма равны нулю, следовательно, точки a ' и d ' будут совпадать с полюсом плана ускорений.
Рассматриваем движение точки C со звеньями В C и CD и по аналогии с планом скоростей составляем векторные уравнения:

Полные относительные ускорения a C B и a CD, представляем в виде суммы двух составляющих — нормальной, направленной по оси соответствующего звена к центру вращения в относительном движении, и тангенциальной, перпендикулярной к этому звену. Тогда получим:
 (5)
(5)
 (6)
(6)
В этих уравнениях ускорение а B известно по величине и по направлению, ускорение a D = 0.
Определяем величины нормальных ускорений:

Ускорение  направлено по оси звена C В от точки C к точке B, ускорение
направлено по оси звена C В от точки C к точке B, ускорение  - по оси звена DC от точки С к точке D.
- по оси звена DC от точки С к точке D.
Относительные тангенциальные ускорения известны только по линиям их действия. Ускорение  перпендикулярно звену C В, а ускорение
перпендикулярно звену C В, а ускорение  перпендикулярно звену DC. Величины и направления тангенциальных ускорений определяем путем построения плана ускорений.
перпендикулярно звену DC. Величины и направления тангенциальных ускорений определяем путем построения плана ускорений.
От точки b ' плана ускорений параллельно звену C В в направлении от точки C к точке B откладываем вектор b ' n 1 изображающий ускорение . Длина этого отрезка

Через точку п 1 проводим перпендикулярно к звену C B линию действия тангенциального ускорения . Затем от точки d ' плана ускорений, совпадающей с полюсом р ', параллельно звену DC в направлении от точки C к точке D откладываем вектор d ' п 2, изображающий ускорение . Определим длину этого отрезка:

Через точку п 2 проводим перпендикулярно звену CD линию действия тангенциального ускорения . На пересечении линий действия ускорений и получим точку c — конец вектора р ' c ', изображающего ускорение a C точки C механизма:

Точка c ' определяет также концы векторов n1 c ' и n2 c ' тангенциальных ускорений и :


Вектор b ' c ' изображает полное относительное ускорение a CB точки C во вращении вокруг точки B:

Рис. 1.4
Вектор d ' c ' полного ускорения a CD точки C во вращении относительно точки D механизма совпадает с вектором p' c ' абсолютного ускорения точки C. Следовательно:

Находим положение точки e ' на плане ускорений исходя из пропорции

ускорение точки E

Для определения ускорения точки F воспользуемся векторными уравнениями:
 (7)
(7)
 (8)
(8)
где нормальное ускорение
направлено по оси звена E F от точки F к точке E.
От точки e ' плана ускорений параллельно звену E F в направлении от точки F к точке E откладываем вектор e 'n3, изображающий нормальное ускорение  , предварительно определив длину этого отрезка:
, предварительно определив длину этого отрезка:
Из точки п 3 перпендикулярно звену E F проводим линию действия тангенциального ускорения  . Поскольку ускорение a F O равно нулю, то точка f 0 ' на плане ускорений совпадает с полюсом р '. Через точку f 0 ' параллельно оси направляющих ползуна проводим линию действия ускорения a FF 0. Точка f ' пересечения этих линий действия определяет конец вектора, изображающего абсолютное ускорение точки F:
. Поскольку ускорение a F O равно нулю, то точка f 0 ' на плане ускорений совпадает с полюсом р '. Через точку f 0 ' параллельно оси направляющих ползуна проводим линию действия ускорения a FF 0. Точка f ' пересечения этих линий действия определяет конец вектора, изображающего абсолютное ускорение точки F:

Точка f ' определяет также концы векторов n3 f ' = e ' f ', изображающих тангенциальное и полное относительное a FE ускорения:


Вектор f 0 ' f ' ускорения a FF O совпадает с вектором p' f ' абсолютного ускорения точки F. Следовательно,

Зная положения центров тяжести S2, S3, S4 на звеньях по аналогии с планом скоростей находим по правилу подобия соответствующие им точки s'2, s'3, s'4 на плане ускорений. Соединяем полученные точки с полюсом плана ускорений и определяем ускорения центров тяжести:



Определяем угловые ускорения звеньев

Направления угловых ускорений определяем направлением соответствующих векторов тангенциальных ускорений.
2. Силовой анализ рычажного механизма
2.1 Силовой расчет механизма методом планов сил
Схема механизма в заданном положении вычерчивается отдельно. На этой схеме следует показать все силы, действующие на звенья – силы тяжести, силы и моменты инерции, силу сопротивления – т.е. составить схему нагружения механизма.
Определяя инерционную нагрузку звеньев механизма, следует иметь в виду, что в общем случае система сил инерции приводится к главному вектору и главному моменту инерции.
Главный вектор сил инерции приложен в центре масс звена и определяется по формуле:
 , (2.1)
, (2.1)
где:  - масса звена в
- масса звена в  ;
;  - ускорение центра масс звена в
- ускорение центра масс звена в  ;
;
Направление главного вектора сил инерции противоположно направлению ускорения центра масс звена.
Главный момент инерции:
 , (2.2)
, (2.2)
где:  - момент инерции звена, относительно оси, проходящей через его центр тяжести,
- момент инерции звена, относительно оси, проходящей через его центр тяжести,  ;
;  - угловое ускорение звена,
- угловое ускорение звена,  .
.
Главный момент сил инерции направлен в сторону, противоположную угловому ускорению, которое определяется направлением соответствующего тангенциального ускорения.
Главный момент инерции Ми заменяется эквивалентной парой сил, направление которой совпадает с направлением главного момента. Длина плеча пары сил принимается равной длине звена. Величины сил пары определяются:
 .
.
Также главный вектор и главный момент сил инерции можно заменить результирующей силой, величина которой равна величине главного вектора инерции, а точка приложения находится параллельным переносом главного вектора инерции на плечо
 . (2.3)
. (2.3)
Плечо должно быть показано на структурной группе так, чтобы момент результирующей силы инерции относительно центра тяжести звена имел направление главного момента сил инерции.
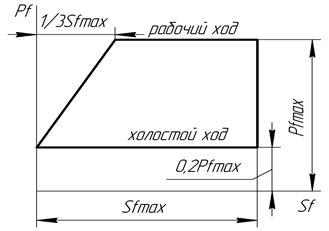
При определении величины силы сопротивления  для заданного положения механизма необходимо построить график зависимости этой силы от перемещения ползуна. Для этого по оси абсцисс нужно отложить отрезок, соответствующий максимальному перемещению ползуна. Этот отрезок рекомендуется измерить непосредственно по планам положений, тогда масштабный коэффициент
для заданного положения механизма необходимо построить график зависимости этой силы от перемещения ползуна. Для этого по оси абсцисс нужно отложить отрезок, соответствующий максимальному перемещению ползуна. Этот отрезок рекомендуется измерить непосредственно по планам положений, тогда масштабный коэффициент  будет тот же. По оси ординат отложить значения силы сопротивления в произвольно выбранном масштабе
будет тот же. По оси ординат отложить значения силы сопротивления в произвольно выбранном масштабе  [ н/мм ]. На рис. 2.1 показан пример определения величины силы сопротивления в заданном положении механизма.
[ н/мм ]. На рис. 2.1 показан пример определения величины силы сопротивления в заданном положении механизма.
Верхняя часть графика силы сопротивления с большими значениями этой силы соответствует рабочему ходу ползуна, нижняя часть, с малыми значениями силы – холостому ходу.
Рабочий ход – медленный, холостой ход – быстрый. Для выяснения вопроса о том, какой ход является рабочим, а какой холостым, следует обратиться к планам положения и по перемещению ползуна определить в каком направлении ползун движется быстрее. В тех случаях, когда скорости для прямого и обратного хода одинаковы, за рабочий ход рекомендуется принимать ход ползуна, соответствующий его удалению от центра вращения кривошипа.

рис. 2.1
При определении направления силы сопротивления следует иметь в виду, что эта сила всегда направлена в сторону, противоположную скорости ползуна.
Сила тяжести приложена в центре масс звена и определяется по формуле:
 . (2.4)
. (2.4)
Для определения реакций в кинематических парах вычерчивают группы Ассура в том же масштабе, что и схема механизма, и составляют схемы нагружения групп: переносят со схемы механизма все известные силы, отброшенные звенья заменяют реакциями в кинематических парах. При этом следует иметь в виду, что во вращательных парах искомые реакции следует раскладывать на составляющие, нормальную (направленную вдоль звена) и тангенциальную (направленную перпендикулярно к нему), в поступательной паре реакцию следует направлять перпендикулярно оси движения этой пары.
Силовой расчет начинают с последней, если считать по формуле строения механизма, группы и заканчивать ведущим звеном. Для каждой группы составляют условие кинетостатического равновесия  .
.
Тангенциальные составляющие реакций определяются аналитически, для этого составляются уравнения равновесия в форме моментов отдельно для каждого звена группы:  .
.
Нормальные составляющие и полные реакции определяются построением плана сил. При построении планов сил векторы одного звена группы рекомендуется складывать последовательно, а затем переходить к сложению сил другого звена.
Значения реакций в кинематических парах, полученных в результате силового расчета методом планов сил, занести в таблицу 2.1.
Таблица 2.1
 ,Н ,Н
|  , Н , Н
|  , Н , Н
|  ,Н ,Н
|  , Н , Н
|  , Н , Н
|  , Н , Н
|  ,Н ,Н
|
| …
| …
| …
| …
| …
| …
| …
| …
|
 Пример: определить реакции в кинематических парах и уравновешиваюший момент, приложенный к кривошипу, методом планов сил для механизма (рис.1.2); размеры звеньев те же. Массы и моменты инерции звеньев: m 2 = 80 кг; т3 = 65 кг; т4 = 60 кг;т5 = 95 кг; Is 2 =7,8 кгм2; Is 3 =23,9 кгм2; Is 4 =19,1 кгм2; сила производственного сопротивления изменяется по графику Рfmax = 2400 Н.
Пример: определить реакции в кинематических парах и уравновешиваюший момент, приложенный к кривошипу, методом планов сил для механизма (рис.1.2); размеры звеньев те же. Массы и моменты инерции звеньев: m 2 = 80 кг; т3 = 65 кг; т4 = 60 кг;т5 = 95 кг; Is 2 =7,8 кгм2; Is 3 =23,9 кгм2; Is 4 =19,1 кгм2; сила производственного сопротивления изменяется по графику Рfmax = 2400 Н.
Составим схему нагружения механизма (рис. 2.2) внешними силами и силами инерции.
По условию задачи звено АВ вращается с постоянной угловой скоростью, и центр тяжести звена совпадает с осью вращения, поэтому инерционная нагрузка этого звена будет равна нулю:


Звено ВС (шатун) совершает плоскопараллельное движение, при этом возникает сила инерции
 H, направленная противоположно ускорению aS 2 центра тяжести и приложенная в точке S 2.
H, направленная противоположно ускорению aS 2 центра тяжести и приложенная в точке S 2.
Момент инерции  , направленный противоположно угловому ускорению
, направленный противоположно угловому ускорению  звена АВ.
звена АВ.
Для удобства силового расчета механизма момент инерции  представляем эквивалентной парой сил:
представляем эквивалентной парой сил: 
Звено C D (коромысло) совершает ускоренное возвратно-вращательное движение, в этом случае также имеет место сила инерции  и момент
и момент  . Определяем силу и момент инерции:
. Определяем силу и момент инерции:


Заменяем эквивалентной парой сил на плече CD. Определяем величины сил пары:

Звено EF (шатун) совершает плоскопараллельное движение. Определяем возникающие при его движении силу инерции и момент инерции:


Рис. 2.2
Силу инерции РИ4 прикладываем в точке S 4 в сторону, противоположную ускорению aS 4, момент инерции заменяем эквивалентной парой сил:

Звено 5 (ползун) совершает поступательное движение вдоль неподвижной направляющей. В этом случае возникает только сила инерции

Определим силы тяжести по величине:
 ,
, 
 ,
,  .
.
Сила производственного сопротивления в данном положении механизма соответствует максимальному значению Рпс= 2400 Н (рис.2.1).
Силовой расчет механизма начинаем с наиболее удаленной от ведущего звена группы 4 – 5 (рис. 2.4а), состоя щей из звеньев 4 и 5. На группу 4 – 5 действуют известные по величине и направлению силы G 4, G 5, P u 4, P u 5, Р пс и момент инерции Ми4, представленный парой сил Р ’ u 4 и P ’’ u 4. Освобождаем группу 4 – 5 от связей и прикладываем вместо них две реакции: одну реакцию R 05  – в поступательной паре F, перпендикулярную к направляющей ползуна и неизвестную по величине (направление R 05 принимается перпендикулярным к направляющей в условиях, когда силы трения не учитываются); другую R 24 в шарнире Е, неизвестную по величине и направлению. Реакцию R 24 представляем в виде двух составляющих: тангенциальной
– в поступательной паре F, перпендикулярную к направляющей ползуна и неизвестную по величине (направление R 05 принимается перпендикулярным к направляющей в условиях, когда силы трения не учитываются); другую R 24 в шарнире Е, неизвестную по величине и направлению. Реакцию R 24 представляем в виде двух составляющих: тангенциальной  , направленной перпендикулярно к оси звена EF, и нормальной
, направленной перпендикулярно к оси звена EF, и нормальной  , направленной вдоль звена EF. Направлением составляющих задаемся произвольно.
, направленной вдоль звена EF. Направлением составляющих задаемся произвольно.
 а б
а б
Рис. 2.4
Чтобы определить реакции в кинематических парах Е и F, составляем векторное уравнение равновесия сил, действующих на группу 4 – 5, причем сначала в уравнение записываем все силы, действующие на звено 4, затем на звено 5:
 (2.1)
(2.1)
Реакцию ,входящую в уравнение, можно определить аналитически, - для этого составляем уравнение моментов всех сил, действующих на звено EF, относительно точки F:

откуда

Причем, длины плеч измеряем по чертежу (здесь масштабы длин могут быть искажены ввиду уменьшения рисунков).
Для построения плана сил (рис. 2.4б), исходя из величин сил, входящих в уравнение, задаемся масштабом плана  Н/мм и вычисляем длины векторов, изображающих известные силы:
Н/мм и вычисляем длины векторов, изображающих известные силы: