Схема генератора со смешанным возбуждением приведена на рис. 5-54. Можно ее изменить, соединив конец параллельной обмотки возбуждения a с точкой b. Полученная в этом случае схема принципиально не будет отличаться от приведенной на рис. 5-54.
Рис. 5-54. Генератор со смешанным возбуждением.
Мы видели, что у генератора с параллельным возбуждением напряжение при увеличении нагрузки падает и что для поддержания его постоянным нужно увеличивать ток возбуждения.
В генераторе со смешанным возбуждением последовательная обмотка при увеличении нагрузки автоматически увеличивает магнитный поток соответственно току, проходящему по ней.
Таким образом, создается возможность иметь почти постоянное напряжение при любых нагрузках. Внешняя характеристика генератора имеет вид, представленный на рис. 5-55 (кривая а). Для получения этой характеристики последовательную обмотку нужно присоединить таким образом, чтобы поток, создаваемый ею, складывался с потоком, создаваемым параллельной обмоткой. Такое соединение последовательной обмотки называется согласным. Оно наиболее часто применяется на практике. При встречном (дифференциальном) включении обеих обмоток — последовательной и параллельной — напряжение при увеличении нагрузки будет резко падать (кривая с на рис. 5-55).
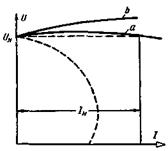
Рис. 5-55. Внешние характеристики генераторов со смешанным возбуждением.
В некоторых случаях применяются генераторы, которые автоматически поддерживают приблизительно постоянное напряжение в конце линии на зажимах приемников. Их внешняя характеристика представлена на рис. 5-55 (кривая b).
5-10. Двигатели
а) Общие вопросы теории.
Для того чтобы двигатель вращался с постоянной скоростью, развиваемый им момент М должен равняться тормозящему моменту нагрузки М ст:
М с = М ст. (5-51)
Если это равенство нарушается, то скорость вращения двигателя уменьшается или увеличивается до тех пор, пока снова момент двигателя не будет уравновешен моментом нагрузки.
Устойчивая работа двигателя постоянного тока, так же как и асинхронного двигателя (см. § 3-14, а), может быть только при выполнении условия
 . (5-52)
. (5-52)
Это условие выполняется при кривых изменения моментов М и М ст, показанных на рис. 5-56, а, и не выполняется при кривых, показанных на рис. 5-56, б. Действительно, в случае кривых рис. 5-56, а при возмущении режима работы, вызвавшем увеличение скорости вращения (положительное приращение D n), после прекращения возмущения двигатель вернется в исходную точку, так как тормозящий момент М ст больше момента двигателя М (D M ст>D М); при отрицательном приращении D n момент двигателя М больше тормозящего момента М ст (D M >D М ст), следовательно, двигатель после прекращения возмущения также вернется в исходную точку. Обратные соотношения получаются в случае кривых моментов рис. 5-56, б; при таких кривых двигатель не может работать устойчиво.
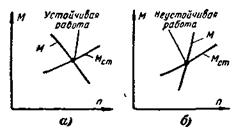
Рис. 5-56. Кривые вращающих моментов. М —двигателя; М ст — нагрузочного.
Обычно для устойчивой работы двигателя необходимо, чтобы при увеличении его скорости вращения развиваемый им вращающий момент уменьшался.
Для изменения направления вращения (для реверсирования) двигателя нужно изменить или направление магнитного потока, или направление тока в обмотке якоря; одновременное же изменение направлений потока и тока якоря не приведет к изменению направления вращения, в чем мы можем убедиться, пользуясь "правилом левой руки".
При пуске двигателей в ход, т. е. при включении их в сеть, необходимо последовательно с обмоткой якоря соединить добавочное сопротивление, которое называется пусковым реостатом.
Если бы не было в цепи якоря пускового реостата, то при пуске в первый момент мы получили бы ток в якоре (здесь мы пренебрегаем влиянием индуктивности цепи якоря, которая несколько уменьшает пусковой ток в начальный период)
 , (5-53)
, (5-53)
где S r — сумма всех сопротивлений внутренней цепи якоря (включая и сопротивление переходных контактов щеток). Так как сопротивление S r мало, то ток в якоре получился бы во много раз больше номинального.
Для примера возьмем нормальный двигатель мощностью 10 кВт при напряжении U н = 110 В, номинальном токе I н = 108 F и сопротивлении S r = 0,08 Ом. Начальный пусковой ток этого двигателя, если бы мы его включили в сеть без пускового реостата, был бы
 , А,
, А,
т. е. превосходил бы почти в 13 раз номинальный ток.
От такого тока могли бы пострадать обмотка якоря и прежде всего коллектор и щетки. Поэтому необходимо последовательно с якорем включать добавочное сопротивление r д, чтобы пусковой ток, равный теперь
 , (5-54)
, (5-54)
не превышал допустимого для двигателя. Так как время пуска сравнительно невелико, то пусковой ток берут несколько больше номинального, доводя его для небольших двигателей до двукратного значения номинального тока.
При пуске двигатель развивает начальный пусковой момент. Двигатель начинает вращаться; в его обмотке якоря начинает наводиться э.д.с. Ea. Применяя "правило левой руки", найдем направление вращения двигателя; применяя при этом "правило правой руки", найдем, что наведенная в якоре э.д.с. направлена против тока и, следовательно, против приложенного к двигателю напряжения. Поэтому она называется противо-э.д.с. или обратной э.д.с. Ее роль при работе машины двигателем была впервые выяснена в работах Э. X. Ленца и Б. С. Якоби.
При вращении двигателя ток в якоре определяется равенством
 . (5-55)
. (5-55)
По мере нарастания скорости вращения и пропорциональной ей обратной э.д.с. Еа добавочное сопротивление нужно уменьшать, т. е. выводить пусковой реостат. Выводить пусковой реостат нужно постепенно, чтобы успевали расти скорость вращения и обратная э.д.с.
Ток в якоре при нормальной работе двигателя, когда выведен весь реостат,
 . (5-56)
. (5-56)
Согласно изложенному выше можем написать уравнение напряжений двигателя:
U = Ea + Ia S r. (5-57)
Найдем скорость вращения двигателя. Из (5-14) следует:
Ea = c э n F; (5-58)
отсюда, учитывая (5-57), получим:
 , (5-59)
, (5-59)
где  - постоянная величина.
- постоянная величина.
Из (5-59) следует, что скорость вращения прямо пропорциональна э.д.с. якоря Е а и обратно пропорциональна магнитному потоку Ф.
В зависимости от способа возбуждения различают двигатели: с параллельным, с последовательным и со смешанным возбуждением.
б) Двигатель с параллельным возбуждением.
Схема двигателя с параллельным возбуждением представлена на рис. 5-57. Пусковой реостат здесь имеет три зажима. Один из них (ручка реостата) присоединяется к сети; другой (конец пускового сопротивления) — к якорю; третий (полоска, по которой скользит ручка реостата) — к обмотке возбуждения или через регулировочный реостат R p, или непосредственно.
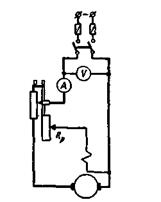
Рис. 5-57. Двигатель с параллельным возбуждением.
Пусковой реостат имеет холостой контакт, не соединенный с пусковым сопротивлением, выполняемый иногда из какого-нибудь изоляционного материала.
Первый контакт пускового реостата соединяется с полоской, к которой присоединена обмотка возбуждения (рис. 5-57). Это делается для того, чтобы цепь возбуждения при остановке двигателя, когда ручка реостата ставится на холостой контакт, была замкнута. Она при этом будет замкнута на обмотку якоря, пусковое сопротивление и регулировочный реостат, если он имеется.
Энергия магнитного поля, запасенная в магнитной системе машины, будет постепенно переходить в электрическую энергию; уменьшение магнитного потока, сцепляющегося с обмоткой возбуждения, вызовет в ней сравнительно небольшую э.д.с. Резкий же разрыв цепи возбуждения при наличии в ней тока приводит к быстрому изменению потока и, следовательно, к появлению большой э.д.с. в обмотке возбуждения, опасной для ее изоляции.
Выключать рубильник следует после того, как ручка реостата поставлена на холостой контакт. Отключая двигатель указанным способом, мы предохраняем контакты рубильника от подгорания и сеть от резкого изменения нагрузки; кроме того, при следующем включении двигателя в сеть мы обеспечиваем пуск его при включенном пусковом реостате.
Магнитный поток Ф двигателя с параллельным возбуждением при I в = const изменяется из-за реакции якоря незначительно. Поэтому с большим приближением можно считать в соответствии с (5-49), что его вращающий момент пропорционален току якоря:
M º Ia. (5-60)
Зависимость n = f (I) при I в = const и U = const называется скоростной характеристикой (рис. 5-58). Ток I = Ia + I в мало отличается от тока Ia, так как I в составляет небольшую долю от I н.
Зависимость n = f (M) при I в = const и U = const называется механической характеристикой (рис. 5-58). Она отличается от скоростной практически только масштабом по оси абсцисс. Сплошная кривая на рис. 5-58 представляет собой обычную характеристику. Она показывает, что скорость вращения с увеличением нагрузки на валу падает.
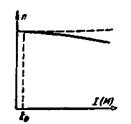
Рис. 5-58. Скоростная n = f (I) или механическая n = f (М) характеристика двигателя с параллельным возбуждением.
Обратимся к формуле (5-59) для скорости n. Из нее видим, что при увеличении тока уменьшается числитель U — Iа S r, при этом будет также уменьшаться знаменатель Ф вследствие реакции якоря. Обычно числитель уменьшается больше, чем знаменатель. Поэтому скорость вращения при увеличении I (или М) будет падать. Если же в двигателе создается сильная реакция якоря, что приводит к большому уменьшению потока Ф, то скорость вращения с увеличением нагрузки будет не падать, а возрастать, например, согласно пунктирной кривой на рис. 5-58. Двигатель с такой характеристикой для работы в обычных условиях практики непригоден, так как он будет работать неустойчиво (рис. 5-56, б).
Показанный на рис. 5-58 ток I 0 есть ток двигателя при холостом ходе (при отсутствии нагрузки на валу).
Двигатели с параллельным возбуждением являются лучшими из регулируемых электродвигателей. Они позволяют плавно и экономично регулировать скорость вращения.
На рис. 5-59 приведены рабочие характеристики двигателя с параллельным возбуждением: М, n, I, h = f (Р 2) при U = const и I в = const (h — к.п.д., Р 2 — мощность на валу).
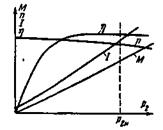
Рис. 5-59. Рабочие характеристики двигателя с параллельным возбуждением.
Формула (5-59) показывает, что для изменения n достаточно изменять поток Ф. Изменение потока достигается путем изменения тока возбуждения при помощи регулировочного реостата R р (рис. 5-57). Так как ток возбуждения составляет небольшую долю номинального тока якоря, то при указанном способе регулирования скорости вращения потери в регулировочном реостате незначительны.
При увеличении тока возбуждения скорость вращения падает, при уменьшении тока возбуждения она возрастает.
При уменьшении I в поток становится меньше. Так как при этом скорость вращения в первый промежуток времени остается почти постоянной вследствие инерции вращающихся частей, то уменьшается э.д.с. Еа. Уменьшение Еа приводит согласно (5-56) к увеличению тока якоря Iа, причем даже небольшое уменьшение Еа дает относительно большое увеличение тока Ia, так как значения U и Еа мало отличаются одно от другого.
В качестве примера рассмотрим работу двигателя при U = 110 В, Еа = 105 В, S r = 0,08 Ом и токе якоря
 А.
А.
Если магнитный поток Ф уменьшить путем уменьшения тока возбуждения на 5%, то э.д.с. Еа в первый промежуток времени, когда скорость еще не успела возрасти, будет равна приблизительно 100 В, а ток якоря
 А,
А,
т. е. при уменьшении Ф на 5% ток возрастает приблизительно на 100%.
Обращаясь к формуле (5-49), мы устанавливаем, что момент М, развиваемый двигателем, повышается, потому что Ia увеличивается больше, чем уменьшается Ф. Увеличение М приводит к увеличению скорости вращения. При ее увеличении будет возрастать э.д.с. Еа, следовательно, будут уменьшаться Ia и М. Режим устанавливается при более высокой скорости вращения, при которой момент двигателя М будет равен моменту нагрузки М ст.
Применяя аналогичные рассуждения, можно доказать, что при увеличении тока возбуждения скорость вращения будет падать.
Рассмотрим, как производится определение скоростной характеристики n = f (I) и механической характеристики n = f (M). Оно может быть произведено при помощи кривой Ea/ n = f (I в), полученной из характеристики холостого хода, снятой опытным путем или найденной путем расчета. Эта кривая представлена на рис 5-60. При других масштабах на осях координат она представляет собой зависимость Ф = f (F в), так как  .
.
Будем считать, что известны величины при номинальной нагрузке: U н, Ia н (I ан = I н- I в. н), n н, I в. н, I в(р.я) или F р.я (I в(р.я) - ток возбуждения, соответствующий размагничивающей н.с. реакции якоря F ря) Тогда определение скорости вращения n при холостом ходе производится следующим образом.
Сначала находим э.д.с. якоря при номинальной нагрузке Еа н = U н- Iа нS r, затем — э.д.с. якоря при холостом ходе E 0 = U н- I а0S r, причем для двигателей, имеющих ток холостого хода Ia 0<0,1 I н можно приближенно принять Eа 0» U н. Далее по кривой рис. 5-60 находим для I в.н =  :
:
 (5-61)
(5-61)
и для I в.н- I в(р.я) =  :
:
 . (5-62)
. (5-62)
Из равенств (5-61) и (5-62) получаем:
 . (5-63)
. (5-63)
Очевидно, что  , т. е. отношению потоков при нагрузке Фн и при холостом ходе Ф0.
, т. е. отношению потоков при нагрузке Фн и при холостом ходе Ф0.
Если известна скорость вращения n 0 при холостом ходе, то скорость вращения при нагрузке равна:
 . (5-64)
. (5-64)
Промежуточные значения скорости вращения при Ia < Ia н найдем определив Еа и I в(р.я) для тока Iа.
Зная Еа, Iа и n, найдем вращающий момент, кг·м
 , (5-65)
, (5-65)
и, следовательно, можем построить механическую характеристику n = f (M). Как отмечалось, для устойчивой работы двигателя необходимо, чтобы n 0 было больше n н.
Если двигатель с параллельным возбуждением предназначается для широких пределов регулирования скорости вращения (например, 4:1) путем изменения тока возбуждения, то при ослабленном поле реакция якоря может оказаться слишком сильной (работа будет протекать на начальной части кривой рис. 5-60) и мы можем получить  > Еа 0/ Еа н и n н> n 0 согласно (5-64).
> Еа 0/ Еа н и n н> n 0 согласно (5-64).
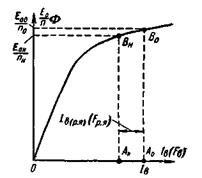
Рис. 5-60. К определению скоростной характеристики.
Тогда необходимо для уменьшения относительного значения реакции якоря (величины I в(р.я)/ I в.н) выполнить двигатель с увеличенным воздушным зазором d. Такие двигатели стоят дороже, чем нормальные двигатели с пределами регулирования скорости вращения примерно 1:1,5.
Регулировать скорость вращения двигателя можно также путем изменения напряжения U на зажимах якоря, что следует из формулы (5-59). Изменение U может быть достигнуто при помощи реостата, включенного в цепь якоря. Такой способ регулирования скорости вращения неэкономичен, так как он приводит к непроизводительной затрате большой энергии в реостате. Действительно, при уменьшении п, например, на 50%, если при этом ток в якоре остается неизменным, мы должны уменьшить U почти на 50% и, следовательно, почти половину мощности поглотить в реостате. Реостат при этом получается громоздким и дорогим, так как рассчитывается на длительную нагрузку большим током.
в) Система "генератор — двигатель".
Иногда в специальных случаях применяют отдельный генератор для питания двигателя, скорость вращения которого нужно регулировать в широких пределах. Получается так называемая система "генератор — двигатель". Соответствующая схема показана на рис. 5-61. Здесь ДПТ — двигатель переменного тока (обычно асинхронный); Г — генератор постоянного тока независимого возбуждения, получающий ток возбуждения от небольшого генератора с параллельным возбуждением В; Д — регулируемый двигатель и РМ — рабочий механизм (например, прокатный стан). Регулирование скорости вращения двигателя получается достаточно экономичным, так как здесь изменение напряжения U на зажимах двигателя достигается путем изменения относительно небольшого тока в обмотке возбуждения генератора. В схеме не требуется также пусковой реостат, так как пуск производится при пониженном напряжении, которое в дальнейшем постепенно повышается.
Здесь же легко осуществляется реверсирование двигателя (изменение направления вращения), если это требуется. В этом случае изменяют направление тока в обмотке возбуждения генератора при помощи переключателя (не показанного на рис. 5-61).
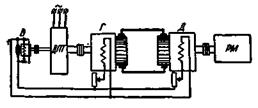
Рис. 5-61. Система генератор-двигатель.
г) Двигатель с последовательным возбуждением.
Схема двигателя с последовательным возбуждением приведена на рис. 5-62. Здесь ток возбуждения равен току якоря. Вследствие этого при малых насыщениях, когда можно считать Fº Ia, вращающий момент двигателя пропорционален квадрату тока [см. (5-49)] При больших значениях тока, когда стальные участки магнитной цепи насыщаются, момент двигателя почти пропорционален току.
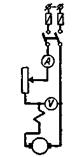
Рис. 5-62. Двигатель с последовательным возбуждением.
С увеличением нагрузки при увеличении, следовательно, тока возрастает магнитный поток, что приводит согласно (5-59) к снижению скорости вращения. При холостом ходе и при малых нагрузках на валу ток двигателя имеет небольшое значение. Небольшое значение будет иметь и магнитный поток. Следовательно, скорость вращения согласно (5-59) при этом сильно возрастает. Она будет превышать допустимое значение в отношении механической прочности вращающихся частей машины. Поэтому нельзя допускать работу двигателя с последовательным возбуждением при холостом ходе и при малых нагрузках. Обычно для нормальных двигателей нагрузка не должна быть меньше 25—30% номинальной. Лишь малые двигатели (мощностью на десятки ватт) допускают работу при холостом ходе, так как их собственные потери достаточно велики.
На рис. 5-63 представлены рабочие характеристики двигателя с последовательным возбуждением. Пунктирные части характеристик относятся к тем нагрузкам, при которых не может быть допущена работа двигателя вследствие большой скорости вращения. Механическая характеристика двигателя с последовательным возбуждением n = f (M) при U =const представлена на рис. 5-64.
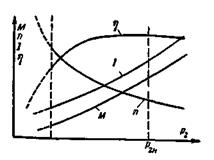
Рис. 5-63. Рабочие характеристики двигателя с последовательным возбуждением.
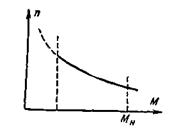
Рис. 5-64. Механическая характеристика двигателя с последовательным возбуждением.
Благодаря своим свойствам двигатель особенно пригоден для электрической тяги, для электроприводов к кранам и подъемникам В этих случаях требуется, чтобы при больших нагрузках скорость резко уменьшалась, а вращающий момент (сила тяги) значительно увеличивался.
Скорость вращения последовательного двигателя можно регулировать путем изменения напряжения U на зажимах якоря или путем изменения магнитного потока. На рис. 5-65 показаны схемы: а) для регулирования путем изменения U при помощи реостата и б) для регулирования путем изменения потока. Так как обычно требуется понижение скорости вращения, то чаще применяют первый способ, который так же неэкономичен, как соответствующий способ регулирования скорости вращения двигателя с параллельным возбуждением.
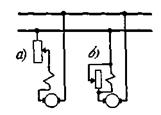
Рис. 5-65. Схемы для регулирования скорости вращения двигателя с последовательным возбуждением.
Для электрической тяги (например, для трамвая) применяются два одинаковых двигателя, установленных на одном и том же вагоне. В этом случае можно получить необходимое число ступеней скорости вращения (7—10) путем комбинирования последовательного и параллельного соединения двигателей вместе с регулировочными сопротивлениями.






