

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Топ:
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Интересное:
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
В этом случае излучатель и детектор располагаются в одном корпусе, что обеспечивает компактность конструкции датчика.
Недостатком этого метода является относительно большое минимальное расстояние обнаружения: отражённые сигналы от объектов, расположенных очень близко к датчику, поступают раньше окончания спада импульса излучателя и по этой причине не могут быть обработаны.
Основные особенности:
• размеры зоны обнаружения зависят от отражательной способности объекта, то есть от характеристик рассеивания поверхности и угла направленности излучения по отношению к ней (в определённых пределах это влияние может быть компенсировано под стройкой чувствительности датчика);
• соответствующие датчики состоят из одного блока и не требуют сложной установки.
Непосредственное обнаружение системой с двумя раздельными преобразователями
Путем применения двух отдельных преобразователей минимальное расстояние обнаружения может быть существенно уменьшено по сравнению со случаем использования единого приёмопередатчика. Если приёмник акустически разделён с излучателем, то, в принципе, отражённый сигнал может быть принят сразу после излучения, а в реальных условиях это происходит с некоторой задержкой, определяемой переходными процессами в преобразователях.
Оба преобразователя могут располагаться в одном корпусе или устанавливаться раздельно (рис. 13). Основные особенности:
• обеспечивается возможность непосредственного обнаружения небольших объектов и работы на малых расстояниях до объекта;
• соответствующие датчики нечувствительны к отражениям от объектов за пределами зоны обнаружения (маскирование фона).
|
|
Ретрорефлективный метод
 |
Посредством этого метода также возможно определять объекты из звукопоглощающих материалов.
Рис. 13. Принцип непосредственного обнаружения объекта датчиком
с раздельными излучателем и приёмником
Метод прерывания луча
Этот метод характеризуется большой дальностью обнаружения, так как в данном случае для определения местоположения объекта ультразвуковая волна должна пройти расстояние между излучателем и приёмником только в одном направлении (рис. 15). Помехоустойчивость этого метода лучше, чем у метода непосредственного обнаружения, потому что обрабатывается излучённый, а не отражённый ультразвуковой импульс.
Однако реализация метода прерывания луча требует более высоких затрат.
Датчики, работающие по прерыванию луча, иногда называют барьерными. Они более предпочтительны для использования внутри помещений по сравнению с датчиками, реализующими метод непосредственного обнаружения.
Сравнение методов
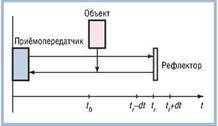 |
Рис. 14. Принцип обнаружения объекта по ретрорефлективному методу
Рис. 15. Принцип обнаружения объекта по методу прерывания луча
 |
|
|
Ретрорефлективный датчик постоянно контролирует расстояние между ультразвуковым излучателем и рефлектором с фиксированным положением. Электронная схема обработки и управления (встроенный контроллер) измеряет время прохождения сигнала. В случае когда соответствующее измеренному времени расстояние оказывается отличным от фиксированного расстояния до рефлектора, выходной электронный ключ переключается. Из-за неизбежных изменений в воздушной среде скорость звука может колебаться в определённых пределах, поэтому при измерении времени необходимо вводить соответствующую внешним условиям поправку (tr ± dt), которая затем учитывается при определении расстояний до рефлектора или объекта (рис. 14).
При определении частоты повторения импульсов (f) рассматриваются три возможных случая:
• объект обнаружен;
• объект не обнаружен;
• эхо-сигнал не поступает в детектор.
В первом случае частота следования импульсов равна
f= 1/(2×t0),
где t0 — время прохождения ультразвукового импульса от датчика до объекта.
Во втором случае частота следования импульсов меньше, чем в первом случае, и вычисляется по удвоенному времени прохождения ультразвукового импульса от датчика до рефлектора (tr):
f= 1/(2×tr).
Третий случай возможен в ситуациях, когда объект обладает свойствами поглощения звука или имеет наклонную поверхность, которая отражает ультразвуковую волну в направлении, отличном от направления на детектор. В этом случае спустя время (tr + dt), которое соответствует максимальному времени прохождения ультразвукового импульса до рефлектора, излучается очередной импульс, как если бы объект отсутствовал в зоне обнаружения датчика:
f=1/(2×(tr+dt)).
Одним из недостатков ретрорефлек-тивного метода является то, что ультразвуковая волна должна пройти от датчика до рефлектора (объекта) и обратно, что в два раза увеличивает время отклика по сравнению с системами, основанными на методе прерывания (ослабления) луча ультразвука (барьерные системы). Другим недостатком является то, что из-за высокого уровня затухания волны на двойном отрезке пути данный метод применим только при относительно небольших расстояниях между датчиком и рефлектором.
При реализации метода прерывания луча детектор и излучатель располагаются строго друг против друга. Вследствие вдвое меньшего расстояния, которое проходит ультразвуковой импульс, и существенно меньших потерь на распространение максимальное расстояние обнаружения для данного объекта в 2,5… 3 раза больше, чем для ретрорефлективного.
|
|
Минимальное расстояние обнаружения для метода прерывания луча зависит от времени реакции преобразователя и связанной с ним электронной части и находится в пределах нескольких сантиметров.
Время прохождения луча измеряется с момента излучения ультразвукового импульса. Электронная схема обработки и управления анализирует поступающие импульсы только в пределах времени распространения tE, которое соответствует расстоянию между излучателем и приёмником (рис. 15). Если луч прерывается, то последующие импульсы не регистрируются приёмником и электронная схема переключает выходной каскад датчика, после чего новый цикл измерения инициируется через промежуток времени (tE + dt). Если ультразвуковой луч не прерывается, то новый измерительный цикл начинается через промежуток времени tE. Так что независимо от того, прерывается луч или нет, частота следования импульсов (F) сохраняется почти постоянной:
F=1/(tE+dt)≈1/tE.
Для того чтобы подавить помехи, электронная схема обработки и управления инициирует задержку переключения дискретного выхода на время, соответствующее нескольким полезным отражённым сигналам. Это повышает помехоустойчивость датчика, но снижает максимальную частоту переключения барьерной системы.
Для дополнительного подавления помех электронная схема обработки изменяет длительность синхронизирующих импульсов в зависимости от рас стояния между излучателем и приёмником.
 Таблица 2. Основные технические данные ультразвуковых датчиков серии 18GK c одним
Таблица 2. Основные технические данные ультразвуковых датчиков серии 18GK c одним
дискретным выходом
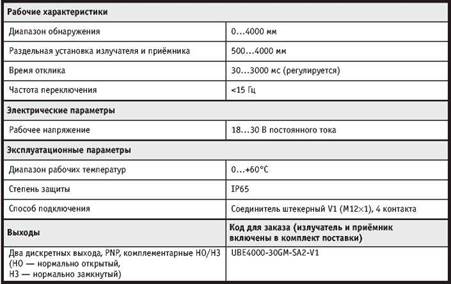 |
Таблица 4. Основные технические данные ультразвуковых датчиков с двумя дискретными выходами в корпусе типа VariKont
|
|
 |
Основные технические данные барьерных ультразвуковых датчиков фирмы Pepperl+Fuchs представлены в таблицах 2, 3, 4, 5, 6.
Например, датчик UBE4000-30GM-SA2-V1 способен функционировать в запылённой атмосфере, надёжно определять наличие тонких прозрачных плёнок и хлопьевидных материалов (стиропор, целлюлоза, мелкозернистые синтетические материалы). Чувствительность датчика регулируется встроенным потенциометром, юстировка контролируется по встроенным светодиодным индикаторам. Для дистанционной регулировки диапазона чувствительности возможно подключение внешнего потенциометра FP100 к излучателю.
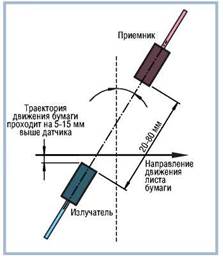
Интересным примерами использования метода ослабления ультразвуковых волн является решение на его основе задач выявления сдвоенных листов бумаги, контроля за положением наклеек и мест стыка. Серия устройств UDB-18GM (табл. 7) специально разработана для подобных применений (рис. 16), которые востребованы в различном оборудовании, например:
• в печатных станках выявление сдавленных листов защищает сложную механику от повреждений, вызванных застреванием второго листа в станке;
• в аппаратах, подсчитывающих этикетки, для проверки факта нанесения клейких плёнок на материал и подсчёта готовых этикеток;
• в оборудовании обработки корреспонденции для проверки полной разгрузки открытых конвертов;
• в аппаратах, подсчитывающих квитанции, контрольные талоны, банковские расписки и т. п.;
• в упаковочных машинах для контроля положения стыка при закреплении алюминиевой упаковочной плёнки, а также для определения скорости хода станка;
• в системах сортировки бумаги и т.д.
Ультразвуковые системы на базе
UDB-18GM способны обнаруживать металлизированные, глянцевые, прозрачные поверхности и могут применяться в тех случаях, когда ёмкостные и оптические системы достигают пределов своих возможностей. Простая настройка на различные материалы и толщины (TEACH-IN), а также автоматическое регулирование порога переключения при изменении условий окружающей среды упрощают подготовку UDB-18GM к эксплуатации и расширяют круг возможных применений.
В ближайших номерах журнала «СТА» планируется, опираясь на описанные в данной статье физические принципы работы и реализуемые методы, продолжить рассказ об ультразвуковых датчиках для систем управления технологическими процессами. •
 |
Таблица 6. Основные технические данные ультразвуковых датчиков серии F64 c диапазоном обнаружения до 1500 мм и одним дискретным выходом
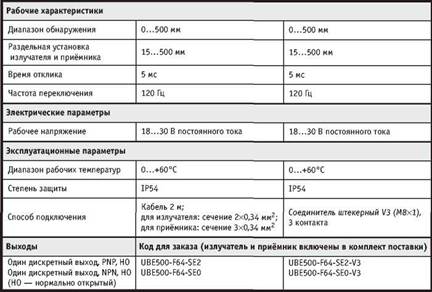 |
Таблица 7. Основные технические данные устройств серии UDB-18GM
|
|
 |
 |
 |
Рис. 16. Схема установки излучателя и приёмника системы на базе устройства UDB-18GM35-3E2 при выявлении сдвоенных листов бумаги.
|
|
|

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!