Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Методические указания и задания для курсовой работы
по дисциплине «Сельскохозяйственные и мелиоративные машины»
для студентов факультета механизации сельского хозяйства
Луганск – 2008
УДК 631.354.2.001.2(075.5)
Автор Щеглов А.В. ст. преподаватель кафедры «Сельскохозяйственные машины»
Щеглов А.В. Технологический расчет рабочих органов зерноуборочного комбайна. Методические указания и задания для курсовой работы по дисциплине «Сельскохозяйственные и мелиоративные машины». - Луганск, 2008 - 37 с
Методические указания содержат необходимые материалы по расчету и проектированию основных рабочих органов зерноуборочного комбайна.
Приведены исходные данные и последовательность расчета режущего аппарата, мотовила, молотильного аппарата, соломотряса, вентилятора и решетной очистки.
Для выполнения курсовой работы студенту необходимо самостоятельно изучить соответствующие темы по лекциям, лабораторно-практическим занятиям и учебной литературе.
Рецензенты:
Кириченко В.Е., декан факультета механизации сельского хозяйства,
к. т. н., доцент.
Муштай В.С., председатель методической комиссии факультета
механизации сельского хозяйства, к. т. н., доцент.
Одобрено и рекомендовано к изданию кафедрой сельскохозяйственных машин (протокол № 8 от 29.04. 2008 г.) и методической комиссией факультета механизации сельского хозяйства ЛНАУ (протокол № 6 от 6.05. 2008 г.).
Луганский национальный аграрный университет
Научно-исследовательский сектор
ВВЕДЕНИЕ
В условиях перехода Украины к рыночным отношениям требования к уровню знаний и умений специалиста сильно возрастают, так как каждое хозяйство работает практически на хозрасчетной основе, в вязи с чем значение инженерных кадров в сельскохозяйственном производстве непрерывно возрастает, к ним предъявляется все более высокие требования. Решение поставленных задач очень сильно осложняется большим разнообразием почвенно-климатических условий нашей страны. Причем сельскохозяйственная техника зачастую недостаточно приспособлена для работы в сложных условиях, что ведет к ухудшению качества работы и снижению урожая, а также к снижению производительности и надежности машин.
В свете этих задач при изучении сельскохозяйственных и мелиоративных машин основное внимание должно уделяться специализации будущих инженеров, более глубокому изучению ими именно тех машин, которые находят широкое применение в зоне, где расположен вуз, чтобы получить от сельскохозяйственной техники максимальную отдачу.
I. ЛИТЕРАТУРА
О с н о в н а я
1. Кленин Н.И., Сакун В.А. Сельскохозяйственные машины. М.: Колос, 1994.
2. Листопад Г.Е. и др. Сельскохозяйственные машины. Под редакцией Г.Е. Листопада. М.: Агропромиздат, 1986.
4. Карпенко А.Н., Халанский В.М. Сельскохозяйственные машины.- М.: Агропромиздат, 1989. - 527 с.
Д о п о л н и т е л ь н а я
5. Босой Е.С. и др. Теория, конструкция и расчет сельскохозяйственных машин. М.: Машиностроение, 1978.
6. Сабликов М.В., Кузьмин М.В. Курсовое и дипломное проектирование по сельскохозяйственным машинам. М.:Колос, 1973.
7. Справочник конструктора сельскохозяйственных машин. Т. 1, 2, 3, 4. М.: Колос, 1982.
8. Справочник по регулировкам и настройкам сельскохозяйственных машин. Л.: Колос, 1982.
9. Практикум з технологiчної наладки та усунення несправностей сiльсько-господарських машин / Г.Р. Гаврилюк, Г.I. Живолуп та iн., за ред. Г.Р. Гаврилюка. - К.: Урожай, 1995. - 280 с.
2. 10. Довiдник по регулюванню сiльськогосподарських машин / В.I. Кочев, А.С. Кушнарьов, В.Д. Роговий та iн., за ред. В.I.Кочева. - К.: Урожай, 1993.-264 с.
По указанию кафедры
11. Научно-технические и научно-производственные журналы.
12. Заводские руководства.
13. Информационные издания и научные отчеты.
II. Содержание курсовой работы
Курсовая работа состоит из пояснительной записки и чертежей. Пояснительная записка должна быть изложена на 20-30 страницах формата А4 (11) (297 х 210 мм). Она пишется от руки и должна содержать следующие разделы. В скобках указан примерный объем разделов.
Введение (1 с.).
Краткая характеристика базового хозяйства (10 с.).
Анализ технологического процесса, в осуществлении которого участвует данная машина (3 с.).
Подготовка машины к работе в конкретных условиях (10 с.):
1. Технологические регулировки машины.
2. Подготовка агрегата к работе.
3. Работа агрегата в поле.
4. Контроль качества работы (в баллах).
5. Техника безопасности.
Определение параметров рабочих органов:
1. Энергетический расчет.
2. Технологический расчет.
3. Кинематический расчет.
4. Прочностной расчет.
5. Совершенствование рабочего органа.
Заключение (1 с.).
Список используемой литературы, содержание.
Чертежи и схемы должны быть выполнены на чертежной бумаге формата А1 (594 х 841 мм) или меньших. Графики выполняются на миллиметровой бумаге. Они складываются до формата А4 и подшиваются сзади к пояснительной записке.
Общий объем чертежей и графиков до 2-х листов формата А1.
III. Последовательность выполнения курсовой работы
Во введении отражаются особенности перехода к рыночной экономике в Украине и возросшие требования к уровню квалификации инженера-механика сельскохозяйственного производства.
Затем дается краткая характеристика природно-климатических особенностей района, в котором расположено хозяйство, направление этого хозяйства, объем производства, достижения и недостатки по производству сельскохозяйственной продукции.
После этого производится анализ технологического процесса (посев, междурядная обработка, уборка и др.), который осуществляется данной машиной, указываются агротехнические требования на ее работу.
В следующем разделе излагается подготовка сельскохозяйственной машины к работе, описываются технологические регулировки (величины зазоров и т.д.), порядок их выполнения перед работой (с учетом местных условий) и методы уточнения регулировок по показателям качества при первых проходах агрегата по полю.
Далее необходимо отметить, какие недостатки в работе машины не удается полностью устранить с помощью регулировок (например, плохая сепарация влажной почвы в картофелеуборочном комбайне). В решении этого вопроса необходимо учитывать свой опыт работы, опыт специалистов хозяйства, публикации в периодической печати. Надо изложить известные (из опыта работы и по литературным данным) методы устранения отмеченных недостатков применительно к местным условиям, а не вообще.
Основное внимание в курсовой работе должно быть уделено изложению методов совершенствования сельскохозяйственной или мелиоративной машины. Цель усовершенствования - повышение производительности и качества работы в условиях определенного хозяйства или зоны. При разработке принятого изменения устройства машины необходимо выполнить расчет параметров и режимов работы основных (измененных) рабочих органов, а также произвести расчет технологических и энергетических показателей машины.
Расчеты должны быть выполнены в объеме, необходимом для обоснования принятых технологических и конструктивных решений. Схему машины, ее элементов, общий вид или схему приспособления, чертежи деталей и др. необходимо вычертить на чертежной бумаге формата от А1 (24) до А4 (11).
Описание и чертежи по совершенствованию машины должны быть выполнены с такой полнотой, чтобы на их основании технически грамотный специалист мог осуществить реализацию (внедрение) технического решения без помощи автора.
Тема и исходные данные к работе определяются по шифру студента (номер зачетной книжки); при желании студент может взять себе индивидуальную тему, она оформляется на бланке выдачи индивидуального задания (см. приложение 1).
В заключении необходимо определить результаты проведенной работы и ее эффективность.
В конце работы приводится список использованной литературы.
Последовательность расчета
Задание для курсовой работы определяется по табл.1. Пользуясь этой таблицей, студент находит исходные данные по расчету рабочих органов зерноуборочного комбайна по последней цифре индивидуального шифра. Дополнительные исходные данные по расчету конкретного рабочего органа определяются по соответствующим таблицам или самостоятельно по согласованию с преподавателем. Если студент принимал личное участие в научном исследовании работы какой-либо другой сельскохозяйственной машины, то он может получить индивидуальное задание по согласованию с преподавателем, руководящим этим исследованием (прилож. 1).
Таблица 1. Исходные данные для определения параметров
рабочих органов зерноуборочного комбайна
Показатели
В а р и а н т ы (последняя цифра шифра)
1
2
3
4
5
6
7
8
9
0
Урожайность U, ц/га
15
30
15
20
20
20
25
25
25
18
Число растений К на 1 м2, шт/м2
500
550
400
420
480
600
450
570
460
520
Удельная нагрузка f, см2/см
8,5
7,2
7,5
7,8
8,1
8,4
8,7
9,0
9,3
9,6
Доп. скорость резания [v], м/с
1,9
2
2,1
2,2
2,1
2
1,9
1,8
1,7
1,8
Высота стеблей
lс, cм
100
80
85
90
110
115
75
95
70
105
Высота среза h, см
10
15
8
12
14
16
18
20
13
17
Ширина захвата жатки В, м
7
4,9
4
5,5
6,5
4,2
4,5
5
5,2
6
Скорость комбайна V, м/с
1
1,5
2,0
2,5
3,0
1
1,5
2
2,5
1,5
Совершенствуемый рабочий орган и марка комбайна выбирается
согласно порядковому номеру в списке журнала учёта посещаемости группы
Номер по списку
1
2
3
4
5
6
7
8
9
10
Марка комбайна
Рабочие органы
СК-5
Е-1200
Д-1500
КТР-10
КЗС-9-1
Лан
КЗС-10
СК-6
СК-10
КЗС-9
р + м
б + с
о + в
р + м
б + с
о + в
р + м
б + с
о + в
р + м
Номер по списку
11
12
13
14
15
16
17
18
19
20
Марка комбайна
Рабочие органы
Д-1200
Mega
K-228
Е-1200
МF-36
СКД-5
Д-1500
КТР-10
КЗС-9-1
ЕМ-524
б + с
о + в
р + м
б + с
о + в
р + м
б + с
о + в
р + м
б + с
Номер по списку
21
22
23
24
25
26
27
28
29
30
Марка комбайна
Рабочие органы
КЗСР-9
Mega
СК-5
СК-10
К-228
СК-6
СКД-5
ЕМ-524
Лан
КЗС-10
о + в
р + м
б + с
о + в
р + м
б + с
о + в
р + м
б + с
о + в
Принятые сокращения: Е – Енисей; Д – Дон; К – Командор; р – режущий аппарат; м – мотовило; б – барабан; с – соломотряс; о – очистка; в - вентилятор
Примечание: при необходимости уточнение отдельных параметров осуществляется студентом по согласованию с преподавателем.
Режущий аппарат
Тип режущего аппарата задается значением размеров сегмента и противорежущей пластинки, а также соотношением величин хода ножа S, расстоянием между сегментами t и расстоянием между пальцами tо.
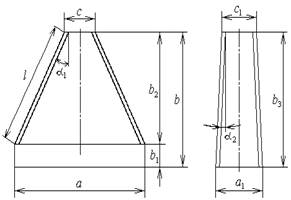
На рис.1 показаны размеры сегмента и противорежущей пластинки (вкладыша). Значения размеров сегмента и вкладыша при соотношении S = t = tо = а представлены в табл. 2.
Рис.1. Сегмент и вкладыш (противорежущая пластина) режущего аппарата.
Требуется определить.
Площадь подачи F на режущий аппарат, подачу L, частоту вращения кривошипа n мин-1, скорости начала Vн и конца Vк резания, высоту стерни h.
Таблица 2. Размеры режущей пары
№ варианта
(последняя цифра шифра)
П а р а м е т р ы
a
a1
b1
b2
B3
c
c1
0
1
2
3
4
5
6
7
8
9
80
79
77
75
71
78
76
74
72
70
32
30
28
26
24
31
29
27
25
23
25
24
23
22
21
20
24,5
23,5
22,5
21,5
55
56
57
58
59
60
55,5
56,5
57,5
58,5
59
60
61
62
63
65
61
62
63
64
16
14
12
10
8
15
13
11
9
8
21
19
17
15
13
20
18
16
14
12
Рис. 2. Типы режущих аппаратов:
а – нормальный с одинарным пробегом S = t = t0, б – нормальный
с удвоенным пробегом ножа S = 2t =2t0, в - низкого резания
S = t = 2t0, г - среднего резания S = t = kt0, где 2 >k >1.
Вычертить:
1. Эскиз сегмента и противорежущей пластинки.
2. Абсолютную траекторию движения ножа.
3. Площадь подачи и площадь нагрузки.
4. Диаграмму отгиба стеблей и высоты стерни по характерным участкам.
5. Графические зависимости перемещения X, относительной Vо, абсолютной скорости Vа и ускорения j сегмента от угла поворота кривошипа j = wt.
6. Скорости начала и конца резания.
Порядок выполнения
1.1. Вычерчивается в масштабе сегмент и противорежущая пластинка по размерам, приведенным в таблице 2.
1.2. Определяются параметры резания
Длина режущей кромки:
.
Площадь нагрузки:
Fн = f× l, cм2
Угол наклона лезвия сегмента:
a1 = arctg((a-c) / 2(b-b1)).
Угол наклона режущей кромки вкладыша:
a2 = arctg((a1-c1) / 2b3).
Угол зацепления стебля:
a3 = a1- a2
Насечка: tнс £ дст / 2,5, мм
где дст – диаметр стебля, дст = 2…4 мм,
Острота лезвия:
- сегмента dс = 25…30 мкм;
- вкладыша dв = 80…130 мкм.
Площадь подачи ножа:
Fп = S×L, см2
где L – подача ножа;
Площадь пробега ножа:
Fпр = S×b2 + L×b2×tga1, см2.
Коэффициент излишне пробегаемой лезвием площади:
.
1.3. Определяется кинематическая характеристика
Число оборотов кривошипа:
n = 30Vм/ L, мин-1.
Угловая скорость:
w = p×n / 30, с-1.
Перемещение ножа, мм
X = r×(1-coswt),
где r – радиус кривошипа, r = S/2.
Путь резания:
Xp = XK - XH,
где XH, XK – положение сегмента в момент начала и конца резания стеблей;
XH = tо – 0,5×(а + а1), мм;
XK = tо – 0,5×(с + с1), мм;
Скорость начала резания:
Скорость конца резания:
Скорость относительного перемещения сегмента:
Vо = w×r×sin(wt), м/с.
Абсолютная скорость перемещения сегмента (в функции от времени):
Ускорение сегмента:
j = r×w2×cos(wt), м/с2.
Таблица 3.Кинематические параметры режущего аппарата
N
j=wt
X
Vo
Va
j
0
1
2
…
24
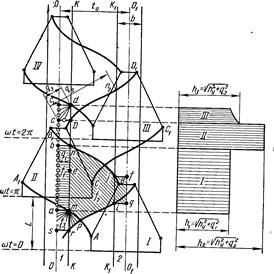
Рис. 3. Графические зависимости перемещения X, относительной Vо и абсолютной скорости Vа, ускорения сегмента j от угла поворота кривошипа j = wt.
Рис. 4. Траектория абсолютного перемещения точки ножа.
Рис 5. Площадь подачи, площадь нагрузки
Рис. 6. Схема к определению скоростей резания
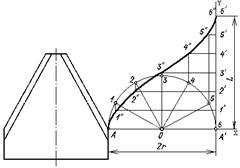
1.4. Строится абсолютная траектория движения ножа (рис. 4).
В системе координат Х0Y в одинаковом масштабе от точки А по оси Х откладывается ход S = 2r (для аппарата нормального типа), а по оси Y - подача L. Затем из т. О, отстоящей от т. А на расстоянии r = S / 2, проводится полуокружность, имитирующая движение конца кривошипа радиуса r. Далее полуокружность (по дуге) и подача L разбивается на одинаковое количество (на 6-8) равных частей, точки деления обозначаются 1, 2, 3, 4, 5, 6, 7, 8 и 1', 2', 3', 4', 5', 6', 7', 8' соответственно (нумерация возрастает по ходу вращения кривошипа и движения машины). После этого через точки 1...8 и 1'...8' проводятся вертикали и горизонтали соответственно и точки их пересечения 1//...8// соединяются плавной кривой, которая и будет являться траекторией абсолютного движения ножа.
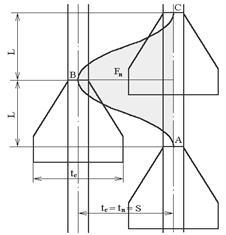
1.5. Вычерчивается площадь подачи и площадь нагрузки (рис.5).
В системе координат XOY вдоль оси Х откладывается в линейном масштабе ход S ножа, а вдоль оси Y - в таком же масштабе две подачи L; затем вычерчивается абсолютная траектория движения сегмента кривая АВС при прямом (справа - налево) и обратном ходе ножа. Площадь, ограниченная этой кривой и линией АС, будет площадью подачи Fп, так как при движении из положения 1 в положение 2 сегмент не срезает растения в пределах площади Fп. Срез растений с этой площади происходит только при ходе сегмента из положения 2 в положение 3. Причем все растения с этой площади срезаются только около одного пальца, поэтому в аппарате нормального резания с одним пробегом ножа площадью подачи Fп равна площади нагрузки Fн, то есть: Fп = Fн.
1.6. Определяется скорость начала и конца резания графическим способом
Для этого проводятся две осевые линии (рис. 6) на расстоянии S в масштабе и линия АХ вдоль пальцевого бруса режущего аппарата. Затем на левой осевой линии вычерчивается правая часть сегмента АВ в исходном левом положении, а на правой осевой линии - противорежущая пластина. Далее от точки А откладывается АО = r и из т. О как из центра вычерчивается полуокружность, которая и будет являться графиком изменения скорости ножа от перемещения х; V = f(х) в масштабе
v = w, м/(с×мм). От т. А откладывается отрезок ААо – зона перекрытия боковыми упорами пальцев режущего аппарата (табл. 4). Из т. Ао проводится горизонтальная линия до пересечения с лезвием противорежущей пластины. Через полученную точку проводится линия А1В1 паралельная линии АВ. После этого от А1 восстанавливается вертикаль А1К1 до пересечения с графиком V = f (x) и находится скорость Vн начала резания. Для определения скорости Vк конца резания проводится через т. В горизонталь до пересечения с противорежущей пластиной в т. В2. Из В2 проводится линия А2В2 ½½ АВ, затем из т. А2 восстанавливается вертикаль А2К2 до пересечения с графиком V = f (х) и определяется скорость конца резания Vк. Таким образом скорость:
- начала резания VH = ½A1K1½×w, м/с
- конца резания VH = ½A2K2½×w, м/с
1.7. Строится диаграмма отгиба стеблей и высоты стерни (рис. 7).
Описание последовательности построения диаграммы подробно приведено на стр. 319-321 [1].
Высота стерни при резани:
- на первом участке
где ha – высота установки режущего аппарата, мм; q1– поперечный отгиб стеблей:
q1= 0,25(а1+с1), мм
- на втором участке
где q2 – продольно-поперечный отгиб стеблей,
где j - угол между касательной к траектории абсолютного движения точки лезвия сегмента в точке её перегиба и линией относительного движения сегмента между пальцами;
j = arctg(L/p×r)
- на третьем участке
где q3 – продольный отгиб стеблей по ходу движения жатки, определяется графическим способом по диаграмме (рис. 7).
Рис. 7. Диаграмма отгиба стеблей и высоты стерни для сегментно-пальцевого аппарата.
1.8. Определяютя силы, действующие на нож
Сила сопротивления срезу:
, Н
где, ε – удельная работа резания, Дж/см2; Fн – площадь нагрузки, см2.
Таблиа 4. Параметры ножевой полосы
Показа-тели
Вариант (предпоследняя цифра шифра)
0
1
2
3
4
5
6
7
8
9
ААо, мм
7,5
8
8,5
9
9,5
10
10,5
11
11,5
12
e, Дж/см2
0,01
0,013
0,016
0,019
0,022
0,025
0,028
0,031
0,015
0,02
т, кг/п.м
1,9
1,95
2,0
2,05
2,10
2,15
2,2
2,25
2,3
2,35
m,
0,34
0,32
0,30
0,28
0,26
0,24
0,33
0,31
0,29
0,27
bº
30
27
24
21
18
15
12
9
6
3
Сила инерции:
Н
где т – вес погонного метра ножевого полотна,кг/п.м.
Сила трения ножа:
Fтр = Fтр1 + Fтр2, Н
где Fтр1 – сила трения от веса ножа:
Fтр1 = 9,81m× т ×В, Н
где m – коэффициент трения;
Fтр2 – сила трения от давления шатуна:
, Н
где b - угол наклона шатуна к ножевому полотну.
Суммарная сила составит:
F = Fc + Fи + Fтр, Н
Мощность на привод ножа определяется из выражения:
N = F w r, Вт (кВт).
Мотовило
Требуется определить:
Основные параметры мотовила:
а) радиус мотовила;
б) пределы установки вала мотовила;
в) путь за один оборот мотовила;
г) степень воздействия мотовила на стебель;
д) максимальный вынос мотовила;
е) коэффициент воздействия мотовила;
ж) мощность на привод мотовила.
Исходные данные определяются по табл.6.
Вычертить:
1. Схемы существующих конструкций мотовил.
2. Траекторию движения планки мотовила и воздействие на хлебостой.
Порядок выполнения
2.1. Определяются параметры мотовила
Таблица 5. Исходные данные
Параметры
Вариант (последняя цифра шифра)
0
1
2
3
4
5
6
7
8
9
Кинематический параметр
1,60
1,55
1,50
1,45
1,40
1,35
1,30
1,65
1,70
1,75
Параметры
Вариант (предпоследняя цифра шифра)
0
1
2
3
4
5
6
7
8
9
Число планок Z
5
6
5
6
5
6
5
6
5
6
Коэффициент e
1,0
1,2
1,4
1,6
1,8
1,1
1,3
1,5
1,7
1,25
Удельное сопротивление p, Н/м
48
50
52
54
56
58
60
62
51
55
Допустимое смещение мотовила ∆, см
5
6
7
8
9
10
5,5
6,5
7,5
8,5
Для нормальной работы мотовила необходимо, чтобы планки в момент подачи стеблей к ножу воздействовали на стебли выше их центра тяжести. Из этого условия радиус мотовила определяется уравнением:
R = l2 / [1,6(1+ l)(1-1/l)], м
где l = lс – h – длина срезаемой части стебля.
Максимальное положение вала мотовила над режущим аппаратом:
Нmax = l + R / l, м
Минимальное положение вала:
Нmin = R +D, м
где, ∆ – допустимое смещение мотовила над режущим аппаратом, м.
Пределы установки вала мотовила:
DН = Нmax - Нmin, м.
Технологические параметры:
- путь за один оборот мотовила:
S = 2 p R / l, м.
- шаг мотовила:
Xz = S / Z, м.
2.2. Работа мотовила с режущим аппаратом.
Траектория движения планки мотовила: укороченная циклоида-трохоида.
Угол вхождения мотовила в хлебостой (в градусах):
j1о = arcsin (1/ l).
Степень воздействия мотовила на стебель:
где j1 = j1о×3,14/1800, рад.
Ширина полосы стеблей, захватываемых планкой без выноса мотовила:
Dx = Sв ×R / l, м.
Угол наклона стеблей планкой (в градусах):
g = 2arcsin(Dx / lc).
Угол выхода мотовила из хлебостоя:
j2о = arcsin[(Rsinj1 + lc(1 - cosg))/R];
Максимальный вынос мотовила:
где j2 = j2о ×3,14 / 1800, рад.
Ширина полосы стеблей, захватываемых планкой c выносом мотовила:
Dx1 = Dx + Сmax(1 - 1 / l), м.
2.3. Определяется коэффициент воздействия мотовила:
где e - коэффициент, учитывающий взаимодействие стеблей.
2.4. Кинематический расчет
Частота вращения:
w = l×nм / R, с-1.
Число оборотов:
n = 30×w / p, мин-1.
Мощность на привод мотовила:
N = pBмwR,
где p – удельное сопротивление мотовила на 1 пог. м, Н/м
2.5. Вычерчивается траектория движения планки (рис.8).
В масштабе откладывают высоту расположения режущего аппарата, установки вала мотовила и проводят горизонтальную и вертикальную ось симметрии мотовила, а также вычерчивают окружность вращения планок радиусом R. Её разбивают на 12 частей и через точки деления проводят горизонтали в пределах отрезка S – пути вала мотовила за один его оборот. Трохоида (траектория движения планки относительно почвы) строится для любой планки путем графического сложения ее перемещения во вращательном и поступательном движениях. Отрезок S необходимо поделить на столько равных частей, на сколько была разделена окружность мотовила. Обозначить соответствующие точки цифрами и согласно рис. 8 выполнить параллельный перенос лучей планок мотовила, охватив края последних плавной кривой - циклоидой.
Определить ширину полосы стеблей, захватываемых планкой при их подводе к режущему аппарату. Для этого на ветви циклоиды отметить точку А, в которой горизонтальная составляющая скорости планки мотовила равна нулю. Вертикальный отрезок АВ соответствует lc. От точки В (находится на линии поверхности поля) на расстоянии h провести пунктирную горизонтальную линию, обозначающую путь движения ножа. Радиусом ВА произвести засечку на второй ветви циклоиды (точка С) и ее соединить прямой с точкой В, которая определит крайнее положение стебля в момент окончания воздействия на него планки. Из точки С на ось перемещения вала мотовила радиусом R сделать засечку и обозначить точкой D. Расстояние по горизонтали между точками D и носком режущего аппаратаопределит максимально возможный вынос оси мотовила вперед (Cmaх), при котором возможен срез пучка подводимых стеблей. Расстояние по горизонтали между вертикалью АВ и точкой пересечения траектории линией ВС определит ширину полосы стеблей, захваченных одной планкой x.
Рис. 8. Траектория движения планки мотовила.
Молотильный аппарат
Молотильные устройства вымолачивают зерно из колоса и частично выделяют его из обмолоченного вороха.
Расчет молотильного устройства производится в 2-х вариантах (определяется преподавателем): бильного и штифтового.
Требуется определить:
Основные параметры молотильного устройства:
а) длину и диаметр барабана;
б) число штифтов на штифтовом и число бил на бильном барабанах;
в) произвести размещение штифтов на штифтовом барабане;
г) мощность на привод барабана;
д) критическую угловую скорость барабана;
е) момент инерции барабана.
Исходные данные определяются по табл.6.
Вычертить:
1. Эскиз барабана (для бильного).
2. Схему размещения штифтов на барабане (для штифтового).
3. Схему размещения штифтов на подбарабанье (для штифтового).
4. Графические зависимости прихода и расхода ускорения на барабане.
Таблица 6. Исходные данные по молотильному аппарату
Параметры
Вариант (предпоследняя цифра шифра)
0
1
2
3
4
5
6
7
8
9
Угловое ускорение, с-2
12,0
12,5
13,0
13,5
14,0
14,5
15,0
15,5
16,0
17,5
Отношение веса соломы к весу зерна b1
1,3
1,4
1,5
1,6
1,7
1,8
1,35
1,45
1,55
1,65
Окружная скорость барабана Vб, м/с
28,0
28,5
29,0
29,5
30,0
30,5
31,0
31,5
32,0
30,0
Время между ударами Δt, ´10-3 с
7,5
7,13
6,75
6,38
6,0
5,63
5,25
4,88
4,5
6,0
Коэффициент перетирания, f
0,6
0,65
0,7
0,75
0,8
0,6
0,65
0,7
0,75
0,8
Расстояние между следами штифтов а, мм
28
29
30
31
32
28
29
30
31
32
Вес одного штифта q1, H
3,0
Высота штифта h, мм
65
66
67
68
69
70
69
68
67
66
Допустимая нагрузка на 1 штифт q, кг/с
0,02
0,021
0,022
0,023
0,024
0,025
0,02
0,021
0,022
0,023
Соломотряс
В существующих зерноуборочных комбайнах наибольшее применение находят клавишные соломотрясы. Известны комбайны с платформенным, конвейерно-роторным соломотрясом и роторным соломоотделителем.
Клавишные соломотрясы бывают с тремя и более клавишами. Каждая клавиша представляет собой корпус 4 (рис. 13) с решетчатой рабочей поверхностью 3, выполненной в виде каскадов. Мелкий ворох, просыпавшийся сквозь отверстия решетки клавиш, по желобу корпуса попадает на очистку. Клавиши с боков несут выступающие над рабочей поверхностью гребенки 1, а некоторые каскады снабжены граблинами 2. Борта и граблины препятствуют скольжению соломы назад, улучшают ее растаскивание и способствуют более равномерному перемещению соломы к выходу из молотилки.
Рис. 13. Схема клавишного соломотряса:
а - двухвального; б - расположение колен четырехклавишного соломотряса; 1 - гребенка; 2 - граблина; 3 - решетчатая поверхность; 4 - корпус клавиши.
Таблица 8. Исходные данные для расчёта соломотряса
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...






 .
.
 .
.








 , Н
, Н Н
Н , Н
, Н