ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД
Роль и место ВД
До начала 80-х годов основным приводом, использующимся в промышленных роботах и в станках с ЧПУ, был электропривод постоянного тока. Однако электродвигатели постоянного тока имеют ряд недостатков, связанных с наличием коллекторно-щеточного узла. Среди них - малый срок службы, например, у двигателей серий ДПР и ДПМ он составляет порядка 3000 час. Решить проблему существенного повышения ресурса двигателей постоянного тока возможно только заменой щеточно-коллекторного узла полупроводниковым коммутатором, выполняющим его функции. Сейчас во всем мире наблюдается тенденция перехода на такие бесконтактные электродвигатели, получившие название вентильных двигателей (конструктивно аналогичных электродвигателям синхронного типа). Вентильные электродвигатели находят применение для промышленных роботов, для привода подач станков с ЧПУ, в мехатронных устройствах.
Первые вентильные электродвигатели выполнялись с большим числом секций замкнутой обмотки якоря, расположенной на статоре, и полупроводниковым коммутатором (коллектором. В последующем перешли к 2-м, 3-м, и многофазным (4-16 фаз) обмоткам, соединенным в звезду. Ротор электродвигателя выполнен с постоянными магнитами. В настоящее время наиболее распространены бесконтактные моментные электроприводы с электродвигателями типа ДБМ, электроприводы типа ЭПБ-1, ЭПБ-2 с электродвигателями типа ДВУ, электроприводы типа ПРБ-1 и ПРБ-2 с электродвигателями типа ДСТ. Среди зарубежных фирм, выпускающих вентильные электродвигатели, следует отметить Siemens (Германия), Fanuc (Япония), Poletti (Италия),
Отличительной конструктивной особенностью вентильных электродвигателей является наличие датчика положения ротора на валу машины, по сигналам которого происходит переключение фаз обмотки якоря с помощью полупроводникового преобразователя типа инвертора. Датчик положения служит для определения относительного положения осей полюса (магнита) ротора и статорных обмоток электродвигателя.
При замене механического коммутатора (коллектора со щетками) полупроводниковым коммутатором электродвигатель становится более надежным и долговечным, создает меньше радиопомех, в то время как у двигателя постоянного тока щетки быстро изнашиваются и имеет место значительное искрение и радиопомехи.
Датчик положения ротора может быть выполнен трансформаторного типа, на базе датчиков Холла, магниторезисторов и управляемых дросселей насыщения, фотоэлектрического типа, могут быть использованы индукционные машины: микросины, индуктосины, редуктосины, вращающиеся трансформаторы.
Вентильные электродвигатели являются одними из самых перспективных для приводов роботов и мехатронных систем. Имея характеристики, аналогичные характеристикам двигателей постоянного тока, вентильные двигатели являются бесконтактными. Существуют следующие схемы соединения многокатушечных обмоток статора вентильных электродвигателей:
- замкнутые с параллельным подключением катушек к источнику питания по типу обмоток машин постоянного тока:
- с последовательным подключением катушек к источнику;
- с лучевым соединением катушек.
Сравнительный анализ вентильных двигателей с различными схемами соединения обмоток показывает:
- наибольший КПД, наименьшую массу, наилучшее использование активных
материалов, наименьшие пульсации момента вращения и соответственно угловой частоты вращения обеспечивают замкнутые обмотки;
- наиболее просты по устройству коммутаторы в двигателях с лучевым соединением фаз.
При этом пропорционально числу фаз увеличивается число чувствительных элементов датчика положения и число транзисторов в коммутаторе. На практике наиболее распространены двигатели с тремя катушками (фазами).
Единой теории вентильных электродвигателей нет. Так, анализ вентильных двигателей малой мощности проводится с использованием методов исследования коллекторных машин постоянного тока (работы И.Е.Овчинникова, Н.И.Лебедева, И.А.Вевюрко, Ш.И.Лутидзе). В работах Л.А.Афанасьева, А.К.Аракеляна, А.Л.Дубенского вентильные двигатели рассматриваются с позиций синхронных машин с использованием уравнений Парка - Горева. Разработаны теоретические основы обобщенного вентильного двигателя. На основе уравнений обобщенного ВД можно получить математическое описание любого из известных типов ВД.
ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД
Роль и место ВД
До начала 80-х годов основным приводом, использующимся в промышленных роботах и в станках с ЧПУ, был электропривод постоянного тока. Однако электродвигатели постоянного тока имеют ряд недостатков, связанных с наличием коллекторно-щеточного узла. Среди них - малый срок службы, например, у двигателей серий ДПР и ДПМ он составляет порядка 3000 час. Решить проблему существенного повышения ресурса двигателей постоянного тока возможно только заменой щеточно-коллекторного узла полупроводниковым коммутатором, выполняющим его функции. Сейчас во всем мире наблюдается тенденция перехода на такие бесконтактные электродвигатели, получившие название вентильных двигателей (конструктивно аналогичных электродвигателям синхронного типа). Вентильные электродвигатели находят применение для промышленных роботов, для привода подач станков с ЧПУ, в мехатронных устройствах.
Первые вентильные электродвигатели выполнялись с большим числом секций замкнутой обмотки якоря, расположенной на статоре, и полупроводниковым коммутатором (коллектором. В последующем перешли к 2-м, 3-м, и многофазным (4-16 фаз) обмоткам, соединенным в звезду. Ротор электродвигателя выполнен с постоянными магнитами. В настоящее время наиболее распространены бесконтактные моментные электроприводы с электродвигателями типа ДБМ, электроприводы типа ЭПБ-1, ЭПБ-2 с электродвигателями типа ДВУ, электроприводы типа ПРБ-1 и ПРБ-2 с электродвигателями типа ДСТ. Среди зарубежных фирм, выпускающих вентильные электродвигатели, следует отметить Siemens (Германия), Fanuc (Япония), Poletti (Италия),
Отличительной конструктивной особенностью вентильных электродвигателей является наличие датчика положения ротора на валу машины, по сигналам которого происходит переключение фаз обмотки якоря с помощью полупроводникового преобразователя типа инвертора. Датчик положения служит для определения относительного положения осей полюса (магнита) ротора и статорных обмоток электродвигателя.
При замене механического коммутатора (коллектора со щетками) полупроводниковым коммутатором электродвигатель становится более надежным и долговечным, создает меньше радиопомех, в то время как у двигателя постоянного тока щетки быстро изнашиваются и имеет место значительное искрение и радиопомехи.
Датчик положения ротора может быть выполнен трансформаторного типа, на базе датчиков Холла, магниторезисторов и управляемых дросселей насыщения, фотоэлектрического типа, могут быть использованы индукционные машины: микросины, индуктосины, редуктосины, вращающиеся трансформаторы.
Вентильные электродвигатели являются одними из самых перспективных для приводов роботов и мехатронных систем. Имея характеристики, аналогичные характеристикам двигателей постоянного тока, вентильные двигатели являются бесконтактными. Существуют следующие схемы соединения многокатушечных обмоток статора вентильных электродвигателей:
- замкнутые с параллельным подключением катушек к источнику питания по типу обмоток машин постоянного тока:
- с последовательным подключением катушек к источнику;
- с лучевым соединением катушек.
Сравнительный анализ вентильных двигателей с различными схемами соединения обмоток показывает:
- наибольший КПД, наименьшую массу, наилучшее использование активных
материалов, наименьшие пульсации момента вращения и соответственно угловой частоты вращения обеспечивают замкнутые обмотки;
- наиболее просты по устройству коммутаторы в двигателях с лучевым соединением фаз.
При этом пропорционально числу фаз увеличивается число чувствительных элементов датчика положения и число транзисторов в коммутаторе. На практике наиболее распространены двигатели с тремя катушками (фазами).
Единой теории вентильных электродвигателей нет. Так, анализ вентильных двигателей малой мощности проводится с использованием методов исследования коллекторных машин постоянного тока (работы И.Е.Овчинникова, Н.И.Лебедева, И.А.Вевюрко, Ш.И.Лутидзе). В работах Л.А.Афанасьева, А.К.Аракеляна, А.Л.Дубенского вентильные двигатели рассматриваются с позиций синхронных машин с использованием уравнений Парка - Горева. Разработаны теоретические основы обобщенного вентильного двигателя. На основе уравнений обобщенного ВД можно получить математическое описание любого из известных типов ВД.
Принцип работы вентильных двигателей
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис.1):
1) бесконтактного двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
Принцип действия бесконтактного двигателя рассматривается на примере упрощенной схемы (рис. 1). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме "закрыт" или "открыт".
Рис. 1. Упрощенная принципиальная схема бесконтактного двигателя
постоянного тока
В положении, показанном на рис. 1, сигнальный элемент через чувствительный элемент "А" открывает транзистор ТА. По обмотке фазы А протекает ток IА. Намагничивающая сила обмотки FА взаимодействует с потоком постоянного магнита ротора. Возникает электромагнитный вращающий момент, и двигатель приводится во вращение (1-й такт на рис. 2). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший 30° СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты сразу два транзистора: ТА и ТВ. Ток будет протекать по двум фазам А и В. Появится результирующая МДС статора FАВ, которая повернется на 60° по сравнению с первым положением (2-й такт на рис. 2).
Рис. 2. Первых три такта в работе бесконтактного двигателя
постоянного тока
Эта МДС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше 90°, транзистор ТА закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с МДС этой обмотки, однако вращающий момент по прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3-й такт на рис. 2). В конечном итоге двигатель достигнет частоты вращения, при которой его электромагнитный момент будет уравновешиваться моментом сопротивления нагрузки.
Если бы бесконтактный двигатель имел число фаз обмотки, чувствительных элементов и транзисторов столько же, сколько обычный двигатель постоянного тока имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает трех или четырех.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
Особенности работы бесконтактного двигателя постоянного тока:
1. Пульсация вращающего момента - возникает вследствие скачкообразного перемещения МДС статора (см. рис. 2). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и МДС взаимодействующих обмоток статора:
 (1)
(1)
где: см - постоянный коэффициент; θ - угол между потоком ротора и МДС статора. Так как при вращении двигателя угол θ непрерывно меняется, то и момент двигателя не остается постоянным.
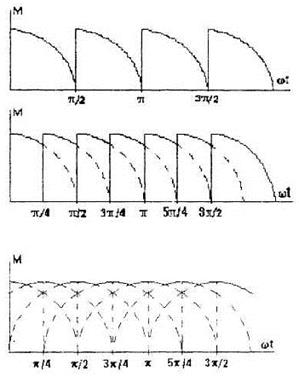
Рис. 3 Графики вращающего момента.
Снижения пульсаций можно добиться путем увеличения числа обмоток (что связано со значительными трудностями), сдвигом всей последовательности на 15 град. (для данной схемы). Кардинальным же решением является переход к позиционной модуляции фазных напряжений по синусоидальному закону (т.е. фактически переход к схеме синхронного двигателя, но с управляемой скоростью движения вектора магнитного поля). Такой подход требует более сложного ДПР, так как необходимо иметь не только информацию о моментах переключения обмоток, но и о промежуточном положении ротора. Кроме того, нужен электронный блок модуляции фазных напряжений.
Также пульсации электромагнитного момента можно существенно уменьшить, расширив зону действия сигнального элемента до  . В этом случае через каждые
. В этом случае через каждые  одновременно включены обе фазы на период
одновременно включены обе фазы на период  . Кривая момента представлена на рис. 3а. Таким образом, обеспечивается достаточно большой пусковой момент при любом положении ротора. Учитывая синусоидальное распределение кривой момента вращения каждой катушки в зависимости от положения ротора, кривую момента можно еще сгладить путем сдвига чувствительных элементов на угол
. Кривая момента представлена на рис. 3а. Таким образом, обеспечивается достаточно большой пусковой момент при любом положении ротора. Учитывая синусоидальное распределение кривой момента вращения каждой катушки в зависимости от положения ротора, кривую момента можно еще сгладить путем сдвига чувствительных элементов на угол  , (рис. 3б). Проблема пульсаций момента имеет значение только на малых скоростях, особенно для безредукторных электроприводов.
, (рис. 3б). Проблема пульсаций момента имеет значение только на малых скоростях, особенно для безредукторных электроприводов.
При пуске вентильного электродвигателя (Мп>Мст) по мере разгона ротора появляется и возрастает ЭДС, наводимая в фазах обмотки статора. Эта ЭДС противодействует напряжению сети, приложенному к фазам обмотки статора, и уменьшает ток фаз, что приводит к снижению вращающего момента. Когда вращающий момент уравновешивается моментом сопротивления, частота вращения ротора достигает установившегося значения. Изменения момента сопротивления вызывают соответствующие изменения частоты вращения ротора, так же как это происходит в двигателях постоянного тока. Изменение частоты вращения ротора приводит к соответствующим изменениям частоты переключения транзисторов коммутатора и соответственно к такому же изменению частоты вращения поля статора. Ротор и поле статора имеют одинаковую синхронную частоту вращения. Эта частота вращения зависит от значения напряжения, подаваемого на фазы обмотки статора и от значения статического момента сопротивления.
Механические характеристики бесконтактного электродвигателя постоянного тока представлены на рис. 4. Как видно в двигательном режиме (1 и 3-й квадранты) механические характеристики симметричны относительно начала координат и достаточно линейны, причем в тем большей степени, чем меньше электромагнитная постоянная времени Тэ. В тормозных режимах (2 и 4-й квадранты) характеристики нелинейны и при больших Тэ наблюдается неустойчивость в работе электропривода.
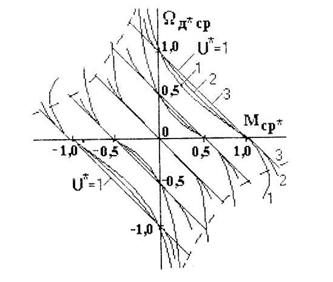
Рис. 4. Механические характеристики бесконтактного электродвигателя
постоянного тока: 1 – при Тэ=1, 2 – при Тэ=0,5, 3 – при Тэ=0,25
Штриховыми линиями на рис. 4 показана граница устойчивости при Тэ=1. Современные вентильные электродвигатели имеют большую перегрузочную способность (Мп/Мн ≥ 5-10), что объясняется использованием редкоземельных постоянных магнитов. При этом нелинейность механических характеристик не превышает 10%. В большинстве случаев можно считать, что механические характеристики бесконтактного вентильного электродвигателя, работающего в двигательном режиме, совпадают с характеристиками двигателя постоянного тока.
2. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
3. Влияние индуктивности обмоток статора. В обычном двигателе секции якоря маловитковые, поскольку общее число витков якоря делится на большое число секций. Индуктивность таких секций сравнительно небольшая. В бесконтактном двигателе общее число витков якоря разбивается на три или четыре обмотки (секции). В результате секции получаются многовитковыми, и следовательно, обладающими большой индуктивностью т.к. L~W2.
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде:
 (2)
(2)
Решая данное уравнение относительно тока, получим:
 (3)
(3)
где Т = L/ R – электромагнитная постоянная времени, сек.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности:
 (4)
(4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при L = 0.
Вращающий электромагнитный момент прямо пропорционален току якоря, поэтому:
 (5)
(5)
или
 (6)
(6)
Анализ выражения (6) показывает, что момент имеет две составляющие. Первую - не зависящую от времени. Она равна моменту при отсутствии индуктивности. Вторую – переменную, которая появляется из-за индуктивности обмоток. Эта составляющая при всех скоростях имеет отрицательное значение (U > E). В связи с этим можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
Для построения механической характеристики бесконтактного двигателя подставим значение ЭДС Е = сеnФ в формулу (6):
 (7)
(7)
Если выразить выражение механической характеристики в относительных единицах, приняв за базисный момент пусковой момент (n = 0, U = Uном), а за базисную скорость - скорость холостого хода (М = 0, U = Uном):
 ;
;  ,
,
а также Разделим обе части уравнения (7) на Мп, получим:
 . (8)
. (8)
Обозначим a = U/Uном и с учетом n0 = U/(сеФ) получим:
 (9)
(9)
где n = n/n0 – относительная скорость двигателя.
На рис.5 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Рис. 5. Механические характеристики бесконтактного двигателя постоянного тока
при разных значения α и L: L2 > L1 > 0






