Таблица 3.3.1
Исходные данные для построения контрольных карт
| № п.п
| X1
| X2
| X3
| X4
| X5
| Xср
| R
|
| 1
| 98,2
| 97,4
| 102,3
| 98,5
| 89,7
| 97,22
| 12,6
|
| 2
| 101,4
| 100,4
| 100,3
| 98,1
| 103,8
| 100,8
| 5,7
|
| 3
| 96,3
| 104
| 101,1
| 100,4
| 103,7
| 101,1
| 7,7
|
| 4
| 92,7
| 106,4
| 98,4
| 95,4
| 98
| 98,18
| 13,7
|
| 5
| 104,1
| 108,9
| 98,1
| 102,5
| 101,2
| 102,96
| 10,8
|
| 6
| 105,3
| 100,6
| 103,4
| 102,4
| 100,8
| 102,5
| 4,7
|
| 7
| 99,8
| 104,2
| 105,3
| 100
| 96,3
| 101,12
| 9
|
| 8
| 96,1
| 101,9
| 105
| 97,5
| 103,4
| 100,78
| 8,9
|
| 9
| 98,7
| 99,7
| 89,8
| 95,7
| 96,3
| 96,04
| 9,9
|
| 10
| 111,2
| 90,9
| 101,9
| 100,6
| 99,2
| 100,76
| 20,3
|
| 11
| 101,5
| 93,3
| 100,4
| 99,4
| 106,8
| 100,28
| 13,5
|
| 12
| 100,2
| 97,8
| 101,6
| 95,8
| 102,6
| 99,6
| 6,8
|
| 13
| 96,4
| 104,4
| 96,2
| 88,5
| 104,5
| 98
| 16
|
| 14
| 102,3
| 98,7
| 99,5
| 102,4
| 116,6
| 103,9
| 17,9
|
| 15
| 85,6
| 105,3
| 101,7
| 99,6
| 99,3
| 98,3
| 19,7
|
| 16
| 90,8
| 97,4
| 93,1
| 99,9
| 109,5
| 98,14
| 18,7
|
| 17
| 92,9
| 102,4
| 104,5
| 106
| 104,6
| 102,08
| 13,1
|
| 18
| 99,6
| 108,5
| 96,9
| 97,9
| 102,4
| 101,06
| 11,6
|
| 19
| 103,8
| 96,8
| 100,2
| 96,3
| 96,3
| 98,68
| 7,5
|
| 20
| 98,2
| 97,4
| 102,3
| 98,5
| 89,7
| 98,68
| 7,5
|
|
|
|
|
|
|
| 100,0789
| 12,00526
|
1)Расчет среднего арифметического, размаха, общего среднего арифметического и общего размаха:
Хср=100,0789; Rср=12,00526.
1) Расчет контрольных границ для карты среднего арифметического:

UCLxср=100,0789+0,577×12,00526 = 107,0059
LCLxср=100,0789-0,577×12,00526 = 93,1519

2) Расчет контрольных границ для карты размаха:
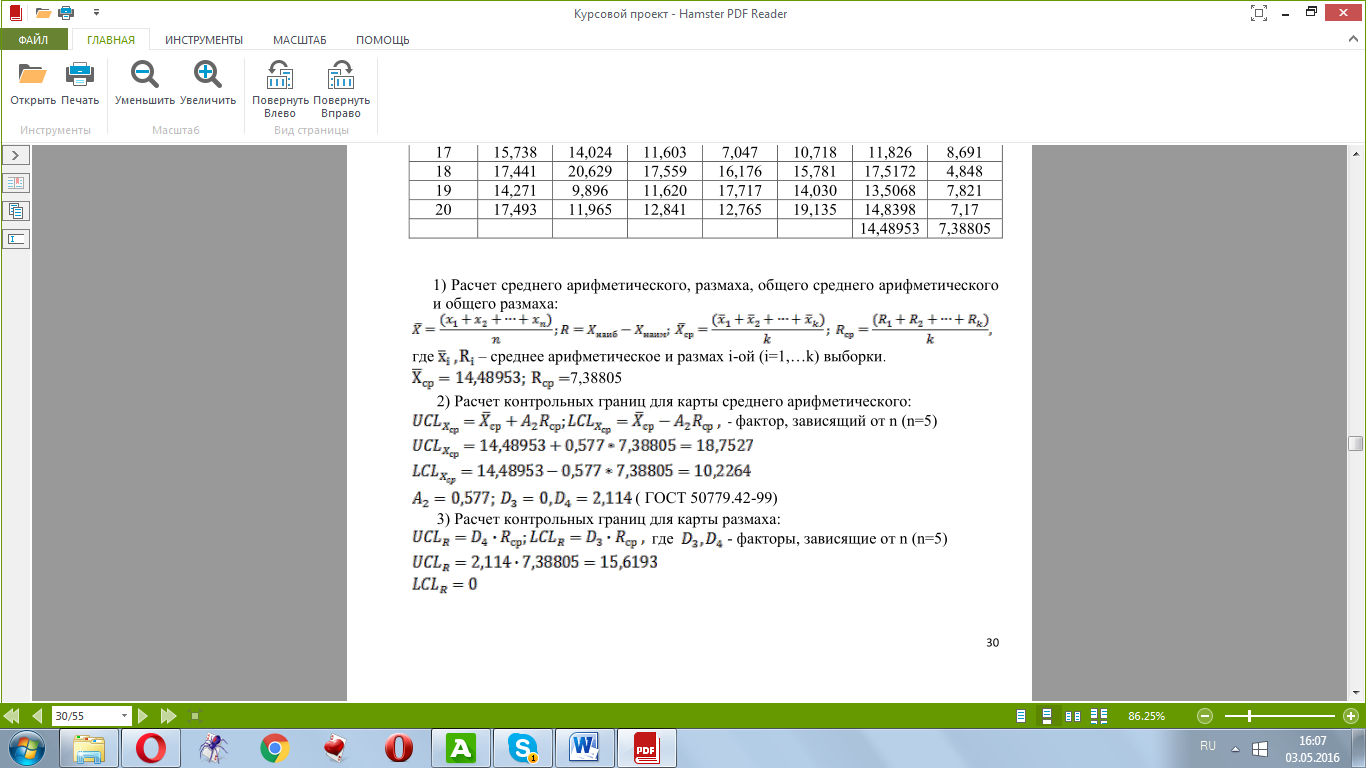
UCLR = 2,144*12,00526=25,739
LCLR= 0
4) Контрольные карты имеют следующий вид:
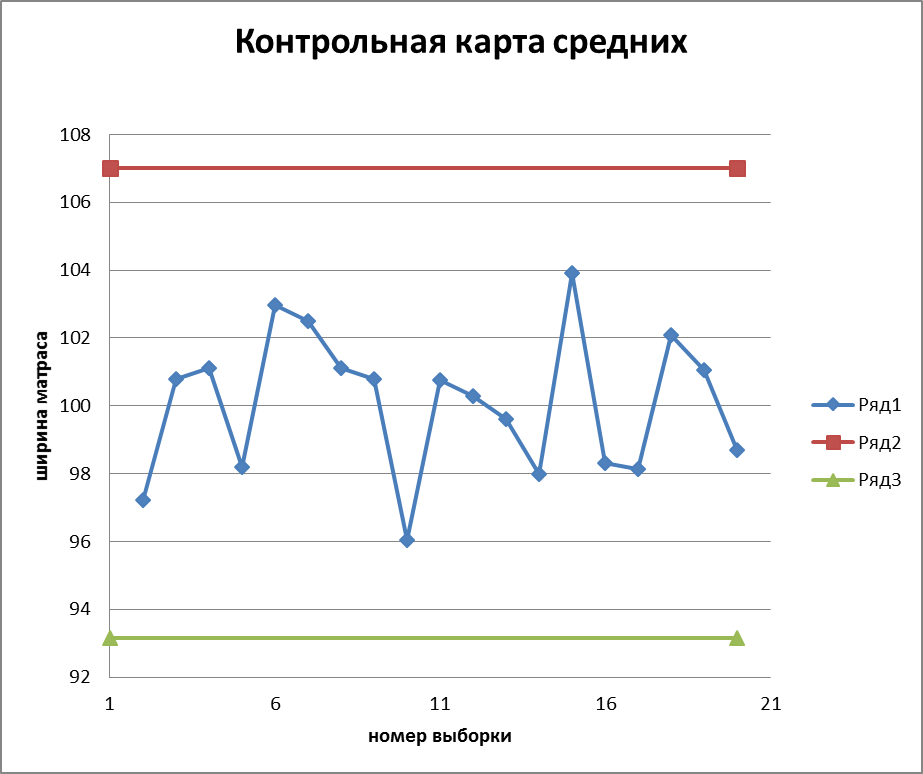
Рис. 3.3.1 Контрольные карты средних

Рис. 3.3.2 Контрольные карты размахов.
Вывод: В построенных картах отсутствует выход результатов за контрольные границы (нет выбросов), периодичность, приближение к центральной линии и линейный тренд, не нарушается случайность распределения точек, т.е. технологический процесс находится в статистически управляемом режиме. Полученные Х и R принять за стандартные значения и использовать при последующем контроле.
Контроль толщины матраса при помощи np – карты (по альтернативному признаку)
Поскольку задано число дефектов для выборки из 100 изделий и n=const, выбирается биноминальная модель и np контрольная карта. Исходные данные (таблица 3.4.1):
Таблица 3.4.1
| № выборки
| Число несоответствующих единиц продукции np
| № выборки
| Число несоответствующих единиц продукции np
|
| 1
| 6
| 16
| 6
|
| 2
| 6
| 17
| 7
|
| 3
| 8
| 18
| 7
|
| 4
| 7
| 19
| 6
|
| 5
| 8
| 20
| 6
|
| 6
| 6
| 21
| 6
|
| 7
| 8
| 22
| 7
|
| 8
| 7
| 23
| 7
|
| 9
| 10
| 24
| 8
|
| 10
| 11
| 25
| 9
|
| 11
| 7
| 26
| 6
|
| 12
| 8
| 27
| 7
|
| 13
| 6
| 28
| 7
|
| 14
| 8
| 29
| 8
|
| 15
| 9
| 30
| 6
|
 Рис.3.4.1 Контрольная np-карта и гистограмма.
Рис.3.4.1 Контрольная np-карта и гистограмма.
Вывод: Так как выбросы отсутствуют и распределение точек приблизительно симметрично и случайно, то полученное значение  можно принять как стандартное и использовать для дальнейшего контроля.
можно принять как стандартное и использовать для дальнейшего контроля.
Проверка на выбросы

Рис. 3.4.2 Проверка на выбросы np-карты.
Вывод: число значений размаха, находящихся ниже LCL и выше UCL равно нулю.
Гистограмма

Рис. 3.4.3 Гистограмма для np-карты.
Оперативная характеристика
 Рис.3.4.4 Оперативная характеристика np-карты.
Рис.3.4.4 Оперативная характеристика np-карты.
Вывод: из графика видно, что чем меньше уровень выборки (N), тем меньше вероятность
Проверка нарушения случайности распределения:

Рис.3.4.5 Проверка нарушений случайности распределения np-карты.
Вывод: нарушений случайности распределения обнаружено и имеется выход законтрольные границы.
Описание контрольной карты (до корректировки)

Рис.3.4.6 Описание контрольной np-карты (до корректировки).
Вывод: все полученные значения кроме 30-ого заключены в пределах 6 σ (от LCL=-3; до UCL=3).
1). Расчет параметров контрольной карты: m=30


 средняя доля дефектов
средняя доля дефектов
 ;
; 
 = 0,1452
= 0,1452
 25,5987
25,5987
 =10,6287
=10,6287
2) Контрольная карта имеет вид:

Вывод: Т.к. выбросы отсутствуют и распределение точек приблизительно симметрично и случайно, то полученное значение можно принять как стандартное и использовать для дальнейшего контроля.






