Колеса транспортных средств и опорная поверхность дороги всегда должны быть в контакте и взаимодействовать в зависимости от веса экипажной части. В точке контакта возникает реакция «действие и противодействие взаимодействующих тел». Поэтому возникает и сила трения, и сила сцепления. Величина этих сил будет зависеть от величины внешней силы, осуществляющей замыкание двух тел.
Кроме того, при взаимодействии двух тел всегда возникает деформация самих взаимодействующих тел. Это существенно меняет картину взаимодействия.
Учет всех этих факторов необходим для определения силы сопротивления к качению колеса относительно своей оси вращения. В свою очередь для определения величины движущей силы привода необходимо знать величину силы сцепления, т. е. силы сопротивления, так как в момент трогания с места величина движущей силы равна величине силы сопротивления качению (сила сцепления).
Рассмотрим идеальный случай (рисунок 4, а), т.е. считается, что соприкасающиеся тела (колеса и дорога) не деформируются.
Вес экипажной части G действует вдоль вертикальной оси колеса, поэтому точка касания находится на этой оси, и реакция N противодействия дороги на действие колеса также будет действовать вдоль этой оси, т.е. G = N. Сила трения FТP, являющаяся, в данном случае, единственным сопротивлением, определяет величину силы сопротивления качению, т.е.:
FТР = fк N и MТР = FТР R, (8)
где fк – коэффициент трения качению, который зависит от материалов соприкасающихся тел;
R – радиус колеса;
M ТР – момент сопротивления трения.
Поскольку коэффициент fк, который определяется экспериментально и по величине колеблется в пределах от 0,02 до 0,1 в зависимости от материалов соприкасающихся тел, имеет крайне малую величину, поэтому сила сопротивления:
FТР = fк G = Рс, (9)
имеет также незначительную величину. В результате транспортные средства при трогании с места склонны к буксованию. Мощность двигателя будет затрачиваться на разгон буксующегося колеса.
В действительности (рисунок 4, б), при нагружении деформируются и колеса, и поверхность дороги. В результате они соприкасаются не в точке о (было бы идеальным случаем), а соприкасаются поверхностью, т.е. на месте соприкосновения образуется площадь (показано штрихом). При вращении колеса возникшее направление нормальной реакции N проходит не вдоль вертикальной оси колеса, а образует с ней угол  . При этом между точками входа колеса в почву «а» и выходом «в» образуется определенный объем грунта. При буксовании колесо выбрасывает этот грунт, а на это затрачивается сила. Сопротивлением качения колеса при этом является не только сила трения FТР, а еще сила объемного сопротивления грунта дороги. Это очень наглядно видно из взаимодействия шагающего колеса. Для буксования шагающее колесо должно будет срезать заштрихованный на рисунке объем грунта. Тогда общее сопротивление качения равно:
. При этом между точками входа колеса в почву «а» и выходом «в» образуется определенный объем грунта. При буксовании колесо выбрасывает этот грунт, а на это затрачивается сила. Сопротивлением качения колеса при этом является не только сила трения FТР, а еще сила объемного сопротивления грунта дороги. Это очень наглядно видно из взаимодействия шагающего колеса. Для буксования шагающее колесо должно будет срезать заштрихованный на рисунке объем грунта. Тогда общее сопротивление качения равно:
Pc=F+Po=  , (10)
, (10)
где fk – коэффициент трения качения;
G – вес, падающий на ось;
 – коэффициент сдвига грунта дороги;
– коэффициент сдвига грунта дороги;
W – объем сдвигаемого грунта;
– коэффициент искажения веса.
Полученное выражение общего сопротивления качения Рс одинаково справедливо для пневмоколеса, автотранспорта и для шагающего колеса.
В последнем случае коэффициент искажения веса почти одинаков по сравнению колеса с ободом, а срезаемый объем грунта W по сравнению с пневмоколесом значительно больше. Поэтому сопротивление качению при взаимодействии шагающего колеса с грунтом значительно больше, чем взаимодействие колеса с ободом, а по твердому грунту практически исключается буксование.
 а)
а)  б)
б) 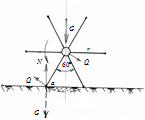 в)
в)
Рисунок 4 – Схема взаимодействия колеса с грунтом
Спица, наступая на поверхность дороги в точке «а», воспринимает нагрузку движителя G роликом, расположенным на другом, противоположном от ступицы конце колеса, на расстоянии L.
Поэтому вес G создает сопротивляющий, к движению колеса, момент с плечом L · sin  т.е.:
т.е.:
Мс =G · Lsin . (11)
Для определения реакции N со стороны дороги, действующей на спицу шагающего колеса, необходимо перенести силу G в параллельном направлении в точку «а» (точку приземления спицы). При этом возникает момент переноса:
Mn=Q · L=G · Lsin . (12)
Оттуда определяется сила Q, пара сил в точке «а»:
Q = Gsin . (13)
Вектор силы Q проектируется в направлении нормальной реакции опоры, т.е.:
Р= Q sin = G sin . (14)
Нормальная реакция поверхности дороги в точке приземления «а» будет:
N = G – P = G(I – sin2 ) = Gcos2 . (15)
Как видно, сила реакции N, определяющая силу трения в точке приземления «а», меньше веса движителя на множитель cos2 φ. При φ = 30 (момент приземления) нормальная реакция будет:
N = 0,74 G.
При φ = 0 (вертикальное положение спицы):
N = G.
Эта особенность движения шагающего колеса создает неблагоприятное условие сцепляемости колеса при движении, т.к. величина силы трения в точке приземления уменьшается по сравнению с пневмоколесами.
Поэтому шагающее колесо ШКА создает хорошее сцепление при ведущем режиме движения. А в прицепном режиме, когда движущая сила приложена к ступице, создается «ползун», т.е. спица склонна скольжению в точке касания с поверхностью дороги по направлению движения.
Тяговая характеристика коляски, которая анализируется инженерными приемами для оптимальных значений каждого параметра путем анализа на круговой диаграмме. Сущность этого анализа заключается в следующем: из рисунка движителя (рисунок 3) видно, что вес инвалида Q раскладывается на две силы Q 1 и Q 2, предложенные в точке а и в. Причем:
 ,
,
кроме этого:
 .
.
Из этой системы легко определить значения Q 1 и Q 2, силы которые зависят от значения ℓ 1и ℓ 2:
 .
.

Рисунок 5 – Схема распределения веса Q
 ,
,
 . (16)
. (16)
 . (17)
. (17)
Прежде всего нужно задаться значением ℓ 1 из конструктивных соображений и определить значения Q 1и Q 2из соотношений (2) и (1).
Далее нужно определить момент сопротивления, созданный силой Q 2относительно точки о при вращении спицы оа по ходу стрелки:
 кгс.м. (18)
кгс.м. (18)
При движении коляски по ровной поверхности опорные колеса не создают момент сопротивления.
Уменьшение силы Р возможно двумя путями. Первое: путем увеличения длины рычага L и путем перемещения сидения, куда приложен вес инвалида Q, так, чтобы составляющая сила Q2 как можно была меньше по величине. Это зависит от плечей ℓ 1и ℓ 2. Для более наглядного анализа выбора указанных параметров построена круговая диаграмма (рисунок 6).
Мс 1= О.
Полный момент сопротивления:
М = Мс 2 + Мс 1, (19)
Мс 1= О.

Рисунок 6 – Круговая диаграмма
При подъеме по лестнице расчеты изменяются, т.к. при подъеме рама коляски становится под углом 26˚÷30˚ и плечо составляющих сил Q 2 и Q 1изменяется. Кроме того, крестовина опорных колес начнет перешагивать полки лестницы. Поэтому составляющая Q 1 создает начальный момент сопротивления:
Мс 1= Q 1 R sin45ºкгс·м.
Полный момент сопротивления:
М = Мс 1 + Мс 2, (20)
Мс 1 ≠ О.





