Определение ускорений точек плоской фигуры
Покажем, что ускорение любой точки М плоской фигуры (так же, как и скорость) складывается из ускорений, которые точка получает при поступательном и вращательном движениях этой фигуры. Положение точки М по отношению к осям Оxy (см.рис.30) определяется радиусом-вектором  где
где  . Тогда
. Тогда
 .
.
В правой части этого равенства первое слагаемое есть ускорение  полюса А, а второе слагаемое определяет ускорение
полюса А, а второе слагаемое определяет ускорение  , которое точка м получает при вращении фигуры вокруг полюса A. следовательно,
, которое точка м получает при вращении фигуры вокруг полюса A. следовательно,
 .
.
Значение , как ускорения точки вращающегося твердого тела, определяется как

где  и
и  - угловая скорость и угловое ускорение фигуры, а
- угловая скорость и угловое ускорение фигуры, а  - угол между вектором
- угол между вектором  и отрезком МА (рис.41).
и отрезком МА (рис.41).
Таким образом, ускорение любой точки М плоской фигуры геометрически складывается из ускорения какой-нибудь другой точки А, принятой за полюс, и ускорения, которое точка М получает при вращении фигуры вокруг этого полюса. Модуль и направление ускорения  , находятся построением соответствующего параллелограмма (рис.23).
, находятся построением соответствующего параллелограмма (рис.23).
Однако вычисление с помощью параллелограмма, изображенного на рис.23, усложняет расчет, так как предварительно надо будет находить значение угла , а затем - угла между векторами и , Поэтому при решении задач удобнее вектор заменять его касательной  и нормальной
и нормальной  составляющими и представить в виде
составляющими и представить в виде
 .
.
При этом вектор  направлен перпендикулярно АМ в сторону вращения, если оно ускоренное, и против вращения, если оно замедленное; вектор
направлен перпендикулярно АМ в сторону вращения, если оно ускоренное, и против вращения, если оно замедленное; вектор  всегда направлен от точки М к полюсу А (рис.42). Численно же
всегда направлен от точки М к полюсу А (рис.42). Численно же


 .
.
Если полюс А движется не прямолинейно, то его ускорение можно тоже представить как сумму касательной  и нормальной
и нормальной  составляющих, тогда
составляющих, тогда
 .
.
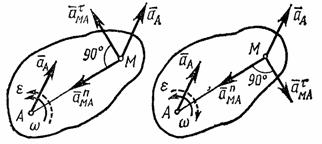
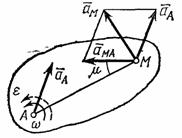
Рис.41 Рис.42
Наконец, когда точка М движется криволинейно и ее траектория известна, то можно заменить суммой  .
.
Мгновенный центр ускорений.
При непоступательном движении плоской фигуры у нее в каждый момент времени имеется точка Q, ускорение которой равно нулю. Эта точка называется мгновенным центром ускорений. Определяется положение центра Q, если известны ускорение какой-нибудь точки А фигуры и величины и , следующим путем:
1) находим значение угла , из формулы  ;
;
2) от точки А под углом , к вектору проводим прямую АЕ (рис.45);
при этом прямая АЕ должна быть отклонена от в сторону вращения фигуры, если вращение является ускоренным, и против вращения, если оно является замедленным, т. е. в сторону направления углового ускорения ;
3) откладываем вдоль линии АЕ отрезок AQ, равный
 .
.

Рис.45
Построенная таким путем точка Q и будет мгновенным центром ускорений. В самом деле, известно что
 ,
,
где численно  . Подставляя сюда значение AQ находим, что
. Подставляя сюда значение AQ находим, что  . Кроме того, вектор
. Кроме того, вектор  должен образовывать с линией AQ угол , следовательно, вектор параллелен , но направлен в противоположную сторону. Поэтому
должен образовывать с линией AQ угол , следовательно, вектор параллелен , но направлен в противоположную сторону. Поэтому  и
и  .
.
Если точку Q выбрать за полюс, то так как  , ускорение любой точки М тела, будет
, ускорение любой точки М тела, будет
 .
.
При этом численно
 .
.
Следовательно, ускорения точек плоской фигуры определяются в данный момент времени так, как если бы движение фигуры, было вращением вокруг мгновенного центра ускорений Q. При этом
 ,
,
т.е. ускорения точек плоской фигуры пропорциональны их расстояниям от мгновенного центра ускорений. Картина распределения ускорений точек плоской фигуры в данный момент времени показана на рис.46.
Следует иметь в виду, что положения мгновенного центра скоростей Р и мгновенного центра ускорений Q в данный момент времени не совпадают. Например, если колесо катится по прямолинейному рельсу (см. рис.47), причем скорость его центра С постоянна ( ), то мгновенный центр скоростей находится в точке Р (
), то мгновенный центр скоростей находится в точке Р ( ), но при этом, как было показано
), но при этом, как было показано  ; следовательно, точка Р не является одновременно мгновенным центром ускорений.
; следовательно, точка Р не является одновременно мгновенным центром ускорений.
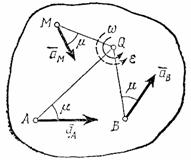

Рис.46 Рис.47
Мгновенный центр ускорений в этом случае находится, очевидно, в точке С, так как она движется равномерно и прямолинейно и  . Центры скоростей и ускорений совпадают тогда, когда фигура (тело) вращается вокруг неподвижной оси.
. Центры скоростей и ускорений совпадают тогда, когда фигура (тело) вращается вокруг неподвижной оси.
Понятием о мгновенном центре ускорений удобно пользоваться при решении некоторых задач.
46. Динамика. Законы Динамики. Динамика точки. Основные понятия и определения.
В разделе кинематики исследовалось движение тел без учета причин, обеспечивающих это движение. Рассматривалось движение, заданное каким-либо способом и определялись траектории, скорости и ускорения точек этого тела.
В разделе динамики решается более сложная и важная задача. Определяется движение тела под действием сил приложенных к нему, с учетом внешних и внутренних условий, влияющих на это движение, включая самих материальных тел.
Динамикой называется раздел механики, в котором изучаются законы движения материальных тел под действием сил.
Понятие о силе, как о величине, характеризующей меру механического взаимодействия материальных тел, было введено в статике. Но при этом в статике мы, по существу, считали все силы постоянными. Между тем, на движущееся тело наряду с постоянными силами (постоянной, например, можно считать силу тяжести) действуют обычно силы переменные, модули и направления которых при движении тела изменяются.
Как показывает опыт, переменные силы могут определенным образом зависеть от времени, от положения тела и от его скорости. В частности, от времени зависит сила тяги электровоза при постепенном выключении или включении реостата; от положения тела зависит сила упругости пружины; от скорости движения зависят силы сопротивления среды (воды, воздуха).
К понятию об инертности тел мы приходим, сравнивая результаты действия одной и той же силы на разные материальные тела. Опыт показывает, что если одну и ту же силу приложить к двум разным, свободным от других воздействий покоящимся телам, то в общем случае по истечении одного и того же промежутка времени эти тела пройдут разные расстояния ибудут иметь разные скорости.
Инертность и представляет собой свойство материальных тел быстрее или медленнее изменять скорость своего движения под действием приложенных сил. Если, например, при действии одинаковых сил изменение скорости первого тела происходит медленнее, чем второго, то говорят, что первое тело является более инертным, и наоборот.
Количественной мерой инертности данного тела является физическая величина, называемая массой тела. В механике масса т рассматривается как величина скалярная, положительная и постоянная для каждого данного тела.
В общем случае движение тела зависит не только от его суммарной массы и приложенных сил; характер движения может еще зависеть от формы тела, точнее от взаимного расположения образующих его частиц (т. е. от распределения масс).
Чтобы при первоначальном изучении динамики иметь возможность отвлечься от учета влияния формы тел (распределения масс), вводится понятие о материальной точке.
Материальной точкой называют материальное тело (тело, имеющее массу), размерами которого при изучении его движения можно пренебречь.
Практически данное тело можно рассматривать как материальную точку в тех случаях, когда расстояния, проходимые точками тела при его движении, очень велики по сравнению с размерами самого тела. Кроме того, как будет показано в динамике системы поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе всего тела.
Наконец, материальными точками можно считать частицы, на которые мы будем мысленно разбивать любое тело при определении тех или иных его динамических характеристик.
Точку будем называть изолированной, если на точку не оказывается никакого влияния, никакого действия со стороны других тел и среды, в которой точка движется. Конечно, трудно привести пример подобного состояния. Но представить такое можно.
Время в классической механике не связано с пространством и движением материальных объектов. Во всех системах отсчета движущихся друг относительно друга оно протекает одинаково.
Законы динамики
В основе динамики лежат законы, установленные путем обобщения результатов целого ряда опытов и наблюдений над движением тел и проверенные обширной общественно-исторической практикой человечества. Систематически эти законы были впервые изложены И. Ньютоном.
Первый закон (закон инерции), открытый Галилеем, гласит: изолированная от внешних воздействий материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока приложенные силы не заставят ее изменить это состояние. Движение, совершаемое точкой при отсутствии сил, называется движением по инерции.
Закон инерции отражает одно из основных свойств материи - пребывать неизменно в движении и устанавливает для материальных тел эквивалентность состояний покоя и движения по инерции. Из него следует, что если F=0, то точка покоится или движется с постоянной по модулю и направлению скоростью ( =const); ускорение точки при этом равно нулю:
=const); ускорение точки при этом равно нулю:  = 0); если же движение точки не является равномерным и прямолинейным, то на точку действует сила.
= 0); если же движение точки не является равномерным и прямолинейным, то на точку действует сила.
Система отсчета, по отношению к которой выполняется закон инерции, называется инерциальной системой отсчета (иногда ее условно называют неподвижной). По данным опыта для нашей Солнечной системы инерциальной является система отсчета, начало которой находится в центре Солнца, а оси направлены на так называемые неподвижные звезды. При решении большинства технических задач инерциальной, с достаточной для практики точностью, можно считать систему отсчета, жестко связанную с Землей.
Второй закон (основной закон динамики) гласит: произведение массы точки на ускорение, которое она получает под действием данной силы, равно по модулю этой силе, а направление ускорения совпадает с направлением силы.
Математически этот закон выражается векторным равенством  .
.
При этом между модулями ускорения и силы имеет место зависимость ma = F.
Второй закон динамики, как и первый, имеет место только по отношению к инерциальной системе отсчета. Из этого закона непосредственно видно, что мерой инертности материальной точки является ее масса, так как две разные точки при действии одной и той же силы получают одинаковые ускорения только тогда, когда будут равны их массы; если же массы будут разные, то точка, масса которой больше (т. е. более инертная), получит меньшее ускорение, и наоборот.
Если на точку действует одновременно несколько сил, то они, как известно, будут эквивалентны одной силе, т.е. равнодействующей  , равной геометрической сумме этих сил. Уравнение, выражающее основной закон динамики, принимает в этом случае вид
, равной геометрической сумме этих сил. Уравнение, выражающее основной закон динамики, принимает в этом случае вид
 или
или  .
.
Третий закон (закон равенства действия и противодействия) устанавливает характер механического взаимодействия между материальными телами. Для двух материальных точек он гласит: две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны.

Заметим, что силы взаимодействия между свободными материальными точками (или телами), как приложенные к разным объектам, не образуют уравновешенной системы.
Проведём небольшой эксперимент. Попробуем перемещать тяжёлое тело по некоторой криволинейной траектории. Сразу обнаружим, что тело сопротивляется изменению направления движения, изменению скорости. Возникает сила со стороны тела, противодействующая силе  , той, которую мы прикладываем к нему.
, той, которую мы прикладываем к нему.
Эту силу, с которой материальная точка сопротивляется изменению своего движения, будем называть силой инерции этой точки -  . По третьему закону она равна и противоположна действующей на точку силе ,
. По третьему закону она равна и противоположна действующей на точку силе ,  . Но на основании второй аксиомы
. Но на основании второй аксиомы  . Поэтому
. Поэтому  .
.
Итак, сила инерции материальной точки по величине равна произведению её массы на ускорение
 .
.
И направлена эта сила инерции в сторону противоположную вектору ускорения.
Например, при движении точки по кривой линии ускорение  . Поэтому сила инерции
. Поэтому сила инерции
 .
.
То есть её можно находить как сумму двух сил: нормальной силы инерции и касательной силы инерции.

Рис.1
Причём


Необходимо заметить, что сила инерции материальной точки, как сила противодействия, приложена не к точке, а к тому телу, которое изменяет её движение. Это очень важно помнить.
Третий закон динамики, как устанавливающий характер взаимодействия материальных частиц, играет большую роль в динамике системы.
Четвертый закон (закон независимого действия сил). При одновременном действии на материальную точку нескольких сил ускорение точки относительно инерционной системы отсчета от действия каждой отдельной силы не зависит от наличия других, приложенных к точке, сил и полное ускорение равно векторной сумме ускорений от действия отдельных сил.
 ;
; 
47. две задачи динамики материальной точки. Задачи динамики для свободной и несвободной материальной точки.
Для свободной материальной точки задачами динамики являются следующие: 1) зная закон движения точки, определить действующую на нее силу (первая задача динамики); 2) зная действующие на точку силы, определить закон движения точки (вторая или основная задача динамики).
Решаются обе эти задачи с помощью уравнений, выражающих основной закон динамики, так как эти уравнения связывают ускорение т.е. величину, характеризующую движение точки, и действующие на нее силы.
В технике часто приходится сталкиваться с изучением несвободного движения точки, т.е. со случаями, когда точка, благодаря наложенным на нее связям, вынуждена двигаться по заданной неподвижной поверхности или кривой.
Несвободной материальной точкой называется точка, свобода движения которой ограничена.
Тела, ограничивающие свободу движения точки, называются связями.
Пусть связь представляет собой поверхность какого-либо тела, по которой движется точка. Тогда координаты точки должны удовлетворять уравнению этой поверхности, которое называется уравнением связи.

Если точка вынуждена двигаться по некоторой линии, то уравнениями связи являются уравнения этой лини.
 ,
, 
Таким образом, движение несвободной материальной точки зависит не только от приложенных к ней активных сил и начальных условий, но так же от имеющихся связей. При этом значения начальных параметров должны удовлетворять уравнениям связей.
Связи бывают двухсторонние или удерживающие и односторонние или неудерживающие.
Связь называется двухсторонней если, накладываемые ею на координаты точки ограничения выражаются в форме равенств, определяющих кривые или поверхности в пространстве на которых должна находится точка.
Пример. Материальная точка подвешена на стержне длины  .
.
Уравнение связи имеет вид:


Связь называется односторонней если, накладываемые ею на координаты точки ограничения выражаются в форме неравенств. Односторонняя связь препятствует перемещению точки лишь в одном направлении и допускает ее перемещение в других направлениях.
Пример. Материальная точка подвешена на нити длины .
Уравнение связи имеет вид:
В случаях несвободного движения точки, как и в статике, будем при решении задач исходить из аксиомы связей (принцип освобождаемости от связей), согласно которой всякую несвободную материальную точку можно рассматривать как свободную, отбросив связь и заменив ее действие реакцией этой связи  . Тогда основной закон динамики для несвободного движения точки примет вид:
. Тогда основной закон динамики для несвободного движения точки примет вид:
 ,
,
где  -действующие на точку активные силы.
-действующие на точку активные силы.
Пусть на точку действует несколько сил. Составим для неё основное уравнение динамики:  Перенесём все члены в одну сторону уравнения и запишем так:
Перенесём все члены в одну сторону уравнения и запишем так:  или
или  .
.
Это уравнение напоминает условие равновесия сходящихся сил. Поэтому можно сделать вывод, что, если к движущейся материальной точке приложить её силу инерции, то точка будет находиться в равновесии. (Вспомним, что на самом деле сила инерции не приложена к материальной точке и точка не находится в равновесии.) Отсюда следует метод решения таких задач, который называется методом кинетостатики:
Если к силам, действующим на точку, добавить ее силу инерции, то задачу можно решать методами статики, составлением уравнений равновесия.
Первая задача динамики для несвободного движения будет обычно сводиться к тому, чтобы, зная движение точки и действующие на нее активные силы, определить реакцию связи.
Пример 1. При движении автомобиля с постоянным ускорением , маятник (материальная точка подвешенная на нити) отклоняется от вертикали на угол  (рис.2). Определим с каким ускорением движется автомобиль и натяжение нити.
(рис.2). Определим с каким ускорением движется автомобиль и натяжение нити.

Рис.2
Рассмотрим «динамическое равновесие» точки. Его так называют потому, что на самом деле точка не находится в равновесии, она движется с ускорением.
На точку действуют силы: вес  и натяжение нити
и натяжение нити  , реакция нити. Приложим к точке ее силу инерции
, реакция нити. Приложим к точке ее силу инерции 
 , направленную в сторону противоположную ускорению точки и автомобиля, и составим уравнение равновесия:
, направленную в сторону противоположную ускорению точки и автомобиля, и составим уравнение равновесия:
Из второго уравнения следует 
Из первого  и
и  .
.
Пример 2. Лифт весом Р (рис.3) начинает подниматься с ускорением  . Определить натяжение троса.
. Определить натяжение троса.
Рис. 3
Рассматривая лифт как свободный, заменяем действие связи (троса) реакцией Т и, составляя уравнение в проекции на вертикаль, получаем:
 .
.
Отсюда находим:  .
.
Если лифт начнёт опускаться с таким же ускорением, то натяжение троса будет равно:
 .
.
48. Дифференциальные уравнения движения точки
С помощью дифференциальных уравнений движения решается вторая задача динамики. Правила составления таких уравнений зависят от того, каким способом хотим определить движение точки.
1) Определение движения точки координатным способом.
Рассмотрим свободную материальную точку, движущуюся под действием сил  ,
,  ,..,
,..,  . Проведем неподвижные координатные оси Oxyz (рис.4). Проектируя обе части равенства
. Проведем неподвижные координатные оси Oxyz (рис.4). Проектируя обе части равенства  на эти оси и учитывая,что
на эти оси и учитывая,что  и т.д., получим дифференциальные уравнения криволинейного движения точки в проекциях на оси прямоугольной декартовой системы координат:
и т.д., получим дифференциальные уравнения криволинейного движения точки в проекциях на оси прямоугольной декартовой системы координат:
 ,
,  ,
,  .
.
Рис.4
Так как действующие на точку силы могут зависеть от времени, от положения точки и от ее скорости, то правые части уравнений могут содержать время t, координаты точки х, у, z и проекции ее скорости  . При этом в правую часть каждого из уравнений могут входить все эти переменные.
. При этом в правую часть каждого из уравнений могут входить все эти переменные.
Чтобы с помощью этих уравнений решить основную задачу динамики, надо, кроме действующих сил, знать еще начальные условия, т.е. положение и скорость точки в начальный момент. В координатных осях Oxyz начальные условия задаются в виде: при 
 .
.
Зная действующие силы, после интегрирования уравнений найдем координаты х, y, z движущейся точки, как функции времени t, т.е. найдем закон движения точки.
49.Динамика несвободной материальной точки. Несвободной называется материальная точка, на движение которой (координаты и скорость) наложены некоторые ограничения. Всякий механизм является примером несвободной системы материальных точек.
Связями называются ограничения движений материальных точек, не зависящие от начальных условий движения и системы приложенных сил. Связи делятся на двухсторонние и односторонние (1.физический маятник из твердого стержня; 2.математический маятник на нити).
Связи бывают голономные (интегрируемые) и неголономные (они накладывают ограничения на скорость точек, неинтегрируемые).
Связи, ограничивающие перемещения материальных точек, действуют на эти точки посредством сил, называемых силами реакции связей.
В задачах динамики несвободной материальной точки пользуются принципом освобождения от связей. Отбрасывая мысленно связи, включают силы реакций связей в число задаваемых сил. При этом несвободная материальная точка рассматривается как свободная, движущаяся под действием задаваемых сил и сил реакций связей.






