Структурная схема замкнутой системы управления. Принцип действия, назначение элементов.
Структура системы
Итак, в типичную систему управления входят объект, регулятор, привод и датчики. Однако, набор этих элементов – еще не система. Для превращения в систему нужны каналы связи, через них идет обмен информацией между элементами. Для передачи информации могут использоваться электрический ток, воздух (пневматические системы), жидкость (гидравлические системы), компьютерные сети.
Основная интрига управления связана с тем, что на объект действует окружающая среда – внешние возмущения, которые «мешают» регулятору выполнять поставленную задачу. Большинство возмущений заранее непредсказуемы, то есть носят случайный характер. Кроме того, датчики измеряют параметры не точно, а с некоторой ошибкой, пусть и малой. В этом случае говорят о «шумах измерений» по аналогии с шумами в радиотехнике, которые искажают сигналы.
Подводя итого, можно нарисовать структурную схему системы управления рис. 1.3.

Например, в системе управления курсом ВС
• объект управления – это само ВС, находящийся в воздухе; для управления его курсом используется руль направления, изменяющий направление потока воздуха;
• регулятор – цифровая вычислительная машина;
• привод – рулевое устройство, которое усиливает управляющий электрический сигнал и преобразует его в поворот руля;
• датчики – измерительная система, определяющая фактический курс;
• внешние возмущения – это турбулентность и ветер, отклоняющие ВС от заданного курса;
• шумы измерений – это ошибки датчиков.
Информация в системе управления как бы «ходит по кругу»: регулятор выдает сигнал управления на привод, который воздействует непосредственно на объект; затем информация об объекте через датчики возвращается обратно к регулятору и все начинается заново. Говорят, что в системе есть обратная связь, то есть регулятор использует информацию о состоянии объекта для выработки управления. Системы с обратной связью называют замкнутыми, поскольку информация передается по замкнутому контуру.
Регулятор сравнивает задающий сигнал («задание», «уставку», «желаемое значение») с сигналами обратной связи от датчиков и определяет рассогласование (ошибку управления) – разницу между заданным и фактическим состоянием. Если оно равно нулю, никакого управления не требуется. Если разница есть, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Поэтому схему регулятора во многих случаях можно представить в виде рис. 1.4.

Структурная схема регулятора. Принцип действия, назначение элементов.
Как работает регулятор?
Регулятор сравнивает задающий сигнал («задание», «уставку», «желаемое значение») с сигналами обратной связи от датчиков и определяет рассогласование (ошибку управления) – разницу между заданным и фактическим состоянием. Если оно равно нулю, никакого управления не требуется. Если разница есть, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Поэтому схему регулятора во многих случаях можно представить в виде рис. 1.4.
Рис.1.4. Структурная схема регулятора.Такая схема показывает управление по ошибке (или по отклонению). Это значит, что для того, чтобы регулятор начал действовать, нужно, чтобы управляемая величина отклонилась от заданного значения. Блок, обозначенный знаком ≠, находит рассогласование. В простейшем случае в нем из заданного значения вычитается сигнал обратной связи (измеренное значение).
Можно ли управлять объектом так, чтобы не было ошибки? В реальных системах – нет.
Прежде всего, из-за внешних воздействий и шумов, которые заранее неизвестны. Кроме того, объекты управления обладают инерционностью, то есть, не могут мгновенно перейти из одного состояния в другое. Возможности регулятора и приводов (то есть мощность сигнала управления) всегда ограничены, поэтому быстродействие системы управления (скорость перехода на новый режим) также ограничена. Например, при управлении кораблем угол перекладки руля обычно не превышает 30 − 35°, это ограничивает скорость изменения курса.
Мы рассмотрели вариант, когда обратная связь используется для того, чтобы уменьшить разницу между заданным и фактическим состоянием объекта управления. Такая обратная связь называется отрицательной, потому что сигнал обратной связи вычитается из задающего сигнала. Может ли быть наоборот? Оказывается, да. В этом случае обратная связь называется положительной, она увеличивает рассогласование, то есть, стремится «раскачать» систему. На практике положительная обратная связь применяется, например, в генераторах для поддержания незатухающих электрических колебаний.
Характеристики САУ
Выходной сигнал любой детерминированной системы зависит от входного сигнала, данному входному сигналу соответствует один вполне определенный выходной сигнал. Иными словами, выходной сигнал данной детерминированной системы является вполне определенной функцией ее входного сигнала. Однако функцию надо в данном случае понимать не в том смысле, как она понимается в элементарном математическом анализе, а в обобщенном смысле, так как аргументом функции в данном случае служит некоторая функция времени — входной сигнал системы, а значением функции при данном значении аргумента (входном сигнале) тоже служит некоторая функция времени — выходной сигнал системы.
В современной математике функцией называется в общем случае однозначное соответствие между любыми объектами — элементами некоторых множеств. А именно функцией называется такое соответствие между элементами двух множеств X и У, когда каждому элементу х множества Xсоответствует один вполне определенный элемент у множества Y. При этом элементами множеств Xи Yмогут быть любые объекты. В частности, ими могут быть скалярные или векторные функции любых переменных.
Математическое описание линейного непрерывного динамического элемента системы сводится к описанию связи между его входом и выходом. Данная связь может быть задана в виде: 1) линейного дифференциального уравнения; 2) передаточной функции; 3) частотных характеристик; 4) временных характеристик; 5) переменных состояния.
1) Как уже отмечалось, распространенной формой описания линейных непрерывных ДЭ (ДС) являются линейные дифференциальные уравнения.
Например:  - во временной области;
- во временной области;
 - в области изображений по Лапласу.
- в области изображений по Лапласу.
2) Передаточная функция ДЭ равна отношению изображения по Лапласу выходного сигнала y(p) к изображению входного воздействия x(p) при нулевых начальных условиях  .
.
3) Частотной характеристикой АС - называется ее реакция на входной гармонический сигнал произвольной частоты.
4) Под временными характеристиками понимают реакцию АС на типовое задающее воздействие. Различают две временные характеристики импульсную (весовую) и переходную.
5) Под переменными состояния понимают минимальный набор переменных, который в данный момент времени вместе со значениями входных переменных определяет поведение системы во все последующие моменты времени.
Переходая функция
Один из методов построения моделей «вход-выход» – определение реакции объекта на некоторый стандартный сигнал. Один из простейших сигналов – так называемый «единичный скачок» («единичный ступенчатый сигнал»), то есть мгновенное изменение входного сигнала с 0 до 1 в момент t =0. Формально этот сигнал определяется так:

Реакция объекта на единичный скачок называется переходной функцией и обозначается h (t):

При этом предполагается, что объект в начальный момент находится в состоянии покоя, то есть, имеет нулевые начальные условия. Это значит, что все его переменные состояния равны нулю и внутренняя энергия также нулевая.
Если начальные условия ненулевые, то для построения сигнала выхода при любом входе нужно использовать дифференциальные уравнения объекта или модель в пространстве состояний. Это значит, что переходная характеристика дает меньше информации, чем исходные уравнения.
Пусть модель объекта задана дифференциальным уравнением первого порядка:

где k – безразмерный коэффициент, а T – некоторая постоянная, которая имеет размерность времени (измеряется в секундах). Найдем переходную характеристику этого звена. Решая уравнение (16) при x (t)=1(t >0), получаем

где постоянная C1 должна определяться из начальных условий. Поскольку нас интересует переходная характеристика, начальные условия считаем нулевыми, то есть y (0)=0, что дает C1 =− k и поэтому

На рисунке показаны переходные характеристики (17) при различных значениях параметра T, который называется постоянной времени звена:

Видно, что при увеличении T выход y медленнее достигает установившегося значения, равного k, то есть постоянная времени характеризует инерционность звена (16). Чем больше постоянная времени, чем медленнее реагирует объект на управление и тем больше усилий нужно для того, чтобы перевести его в новое состояние.
Заметим, что ступенчатый сигнал легко получить на практике, поэтому переходную характеристику можно снять экспериментально.
Требования, предъявляемые к управлению.
Что мы хотим от управления? Это зависит, прежде всего, от решаемой задачи. В задаче стабилизации наиболее важны свойства установившегося режима. Для следящих систем в первую очередь нужно обеспечить высокое качество переходных процессов при изменении задающего сигнала (уставки).
В целом можно выделить четыре основных требования:
• точность – в установившемся режиме система должна поддерживать заданное значение выхода системы, причем ошибка (разница между заданным и фактическим значением) не должна превышать допустимую;
• устойчивость – система должна оставаться устойчивой на всех режимах, не должна идти «вразнос» (корабль не должен идти по кругу при смене курса);
• качество переходных процессов – при смене заданного значения система должна переходить в нужное состояние по возможности быстро и плавно;
• робастность – система должна сохранять устойчивость и приемлемое качество даже в том случае, если динамика объекта и свойства внешних возмущений немного отличаются от тех, что использовались при проектировании.
В тетради.
Системы автоматического слежения за временным положением радиоимпульсов (АСВ). Структурная схема, принцип действия.
Системы АСВ широко применяются (в РЭО) для автоматического (определения) измерения дальности до цели и скорости цели (автоматические дальномеры), для автоматической синхронизации в телевизионных и радиосвязных устройствах и в ряде других случаев.
Основное назначение данных систем - автоматическое измерение дальности до цели в импульсных радиодальномерах.
Принцип формирования информации мы рассмотрели на прошлой лекции:
Таким образом, измерив (tц) время задержки можно определить дальность до цели.
Так как импульс отраженный от цели и принятый импульсным радиодальномерным приемником искажен помехами, а это приводит к ошибкам определения дальности. Для исключения этого недостатка применяется система в которой вырабатываются следящие импульсы, которые не подвержены таким искажениям.
Функциональная схема системы АСВ представлена на рис. 1.14.
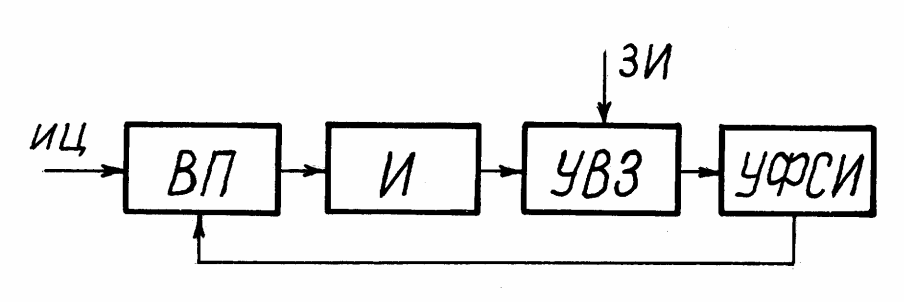
Система АСВ состоит из:
- временного преобразователя;
- интегратора;
- устройства временной задержки;
- устройства формирования следящих импульсов.
Система АСВ работает следующим образом:
Импульсные радиосигналы, отраженные от цели, принимаются импульсным радиолокационным приемником. С выхода приемника видеоимпульсы ИЦ поступают на систему слежения за временем прихода импульсов, на которую поступают также зондирующие видеоимпульсы ЗИ, совпадающие по времени с зондирующими радиоимпульсами передатчика РЛС.
Структурная схема замкнутой системы управления. Принцип действия, назначение элементов.
Структура системы
Итак, в типичную систему управления входят объект, регулятор, привод и датчики. Однако, набор этих элементов – еще не система. Для превращения в систему нужны каналы связи, через них идет обмен информацией между элементами. Для передачи информации могут использоваться электрический ток, воздух (пневматические системы), жидкость (гидравлические системы), компьютерные сети.
Основная интрига управления связана с тем, что на объект действует окружающая среда – внешние возмущения, которые «мешают» регулятору выполнять поставленную задачу. Большинство возмущений заранее непредсказуемы, то есть носят случайный характер. Кроме того, датчики измеряют параметры не точно, а с некоторой ошибкой, пусть и малой. В этом случае говорят о «шумах измерений» по аналогии с шумами в радиотехнике, которые искажают сигналы.
Подводя итого, можно нарисовать структурную схему системы управления рис. 1.3.
Например, в системе управления курсом ВС
• объект управления – это само ВС, находящийся в воздухе; для управления его курсом используется руль направления, изменяющий направление потока воздуха;
• регулятор – цифровая вычислительная машина;
• привод – рулевое устройство, которое усиливает управляющий электрический сигнал и преобразует его в поворот руля;
• датчики – измерительная система, определяющая фактический курс;
• внешние возмущения – это турбулентность и ветер, отклоняющие ВС от заданного курса;
• шумы измерений – это ошибки датчиков.
Информация в системе управления как бы «ходит по кругу»: регулятор выдает сигнал управления на привод, который воздействует непосредственно на объект; затем информация об объекте через датчики возвращается обратно к регулятору и все начинается заново. Говорят, что в системе есть обратная связь, то есть регулятор использует информацию о состоянии объекта для выработки управления. Системы с обратной связью называют замкнутыми, поскольку информация передается по замкнутому контуру.
Регулятор сравнивает задающий сигнал («задание», «уставку», «желаемое значение») с сигналами обратной связи от датчиков и определяет рассогласование (ошибку управления) – разницу между заданным и фактическим состоянием. Если оно равно нулю, никакого управления не требуется. Если разница есть, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Поэтому схему регулятора во многих случаях можно представить в виде рис. 1.4.






