Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования (рис. 19) включают два регулятора – основной(внешний) регулятор R, служащий для стабилизации основного выхода объекта у, и вспомогательный(внутренний) регулятор R 1, предназначенный для регулирования вспомогательной координаты у 1. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.
Выбор законов регулирования определяется назначением регуляторов:
- для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую;
- от вспомогательного регулятора требуется быстродействие, поэтому он может иметь любой закон регулирования.
Сравнение одноконтурных и каскадных АСР показывает, что вследствие более высокого быстродействия внутреннего контура в каскадной АСР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования. Если по условию ведения процесса на вспомогательную переменную накладывается ограничение (например, температура не должна превышать предельно допустимого значения или соотношение расходов должно лежать в определенных пределах), то на выходной сигнал основного регулятора, который является заданием для вспомогательного регулятора, также накладывается ограничение. Для этого между регуляторами устанавливается устройство с характеристиками усилительного звена с насыщением.

Рис. 19. Структурная схема каскадной АСР:
W, W 1 – каналы основной у и вспомогательной у 1 регулируемых величин объекта; R, R 1 –основной и вспомогательный регуляторы; хР, хР1 – регулирующие воздействия регуляторов R и R 1; ε, ε1 – величины рассогласований между текущим и заданным значениями регулируемых величин у и у 1; у 0 – задание основному регулятору R
Примеры каскадных АСР теплотехнологических объектов. На рис. 20 приведен пример каскадной системы стабилизации температуры жидкости на выходе из теплообменника, в которой вспомогательным контуром является АСР расхода греющего пара. При возмущении по давлению пара регулятор 1 изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (вызванном, например, изменением входной температуры или расхода жидкости, энтальпии пара, потерь тепла в окружающую среду), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует задание регулятору расхода пара 1.
В теплотехнологических процессах часто основная и вспомогательная координаты имеют одинаковую физическую природу и характеризуют значения одного и того же технологического параметра в разных точках системы (рис. 21).

Рис.20. Каскадная система регулирования температуры (поз. 2) с коррекцией задания регулятору расхода пара (поз. 1)

Рис. 21. Структурная схема каскадной АСР с измерением вспомогательной координаты в промежуточной точке
На рис. 22 показаны фрагмент технологической схемы, включающий подогреватель реакционной смеси 2 и реактор 1, и система стабилизации температуры в реакторе.
Регулирующее воздействие по расходу пара подается на вход теплообменника. Канал регулирования, включающий два аппарата и трубопроводы, является сложной динамической системой с большой инерционностью. На объект действует ряд возмущений, поступающих в разные точки системы: давление и энтальпия пара, температура и расход реакционной смеси, потери тепла в реакторе и т. п. Для повышения быстродействия системы регулирования применяют каскадную АСР, в которой основной регулируемой переменной является температура в реакторе, а в качестве вспомогательной выбрана температура смеси между теплообменником и реактором.

Рис. 22. Каскадная система регулирования температуры (поз. 4) в реакторе (поз. 1) с коррекцией задания регулятору температуры (поз. 3) на выходе теплообменника (поз. 2)
Расчет каскадных АСР. Расчет каскадной АСР предполагает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристиках объекта по основному и вспомогательному каналам. Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций.
На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту. Как видно из структурных схем на рис. 23, эквивалентный объект для основного регулятора (рис. 23, а) представляет собой последовательное соединение замкнутого вспомогательного контура и основного канала регулирования; передаточная функция его равна
 (93)
(93)

Рис. 23. Структурные схемы эквивалентной одноконтурной системы регулирования с основным (а) и вспомогательным (б) регулятором: вверху – эквивалентная одноконтурная схема; внизу – преобразование каскадной АСР к одноконтурной
Эквивалентный объект для вспомогательного регулятора 2(рис. 23)является параллельным соединением вспомогательного канала и основной разомкнутой системы. Его передаточная функция имеет вид:
 (p)=W1(p) – W(p)R(p). (94)
(p)=W1(p) – W(p)R(p). (94)
Расчет начинают с основного регулятора. Метод используют в тех случаях, когда инерционность вспомогательного канала намного меньше, чем основного. На первом шаге принимают допущение о том, что рабочая частота основного контура (ω р) намного меньше, чем вспомогательного (ω р1) и при ω=ωр
 . (95)
. (95)
Тогда

 . (96)
. (96)
Таким образом, в первом приближении настройки S0 основного регулятора 1не зависят от R1(p) и находятся по Wэ°(p).
На втором шаге рассчитывают настройки вспомогательного регулятора  для эквивалентного объекта (1) с передаточной функцией W1э(p), в которую подставляют R(p,S°).
для эквивалентного объекта (1) с передаточной функцией W1э(p), в которую подставляют R(p,S°).
Комбинированные АСР
Комбинированные АСР применяются при автоматизации объектов, подверженных действию существенных контролируемых возмущении. Комбинированными системы называются потому, что при их построении используются два принципа регулирования: «по отклонению» (принцип Ползунова) и «по возмущению» (принцип Понселе). Системы, построенные по принципу Ползунова, имеют отрицательную обратную связь и работают по замкнутому циклу. Системы по возмущению (Понселе) обратной связи не имеют и работают по разомкнутому циклу.
Существуют два способа построения комбинированных АСР со структурными схемами, приведенными на рис. 24 и 25. Как видно из этих структурных схем, обе системы обладают общими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования — замкнутого (через регулятор 1 ) и разомкнутого (через компенсатор 2 ). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.

Рис. 24. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход объекта: а – исходная схема; б – преобразованная схема; 1– регулятор; 2 – компенсатор
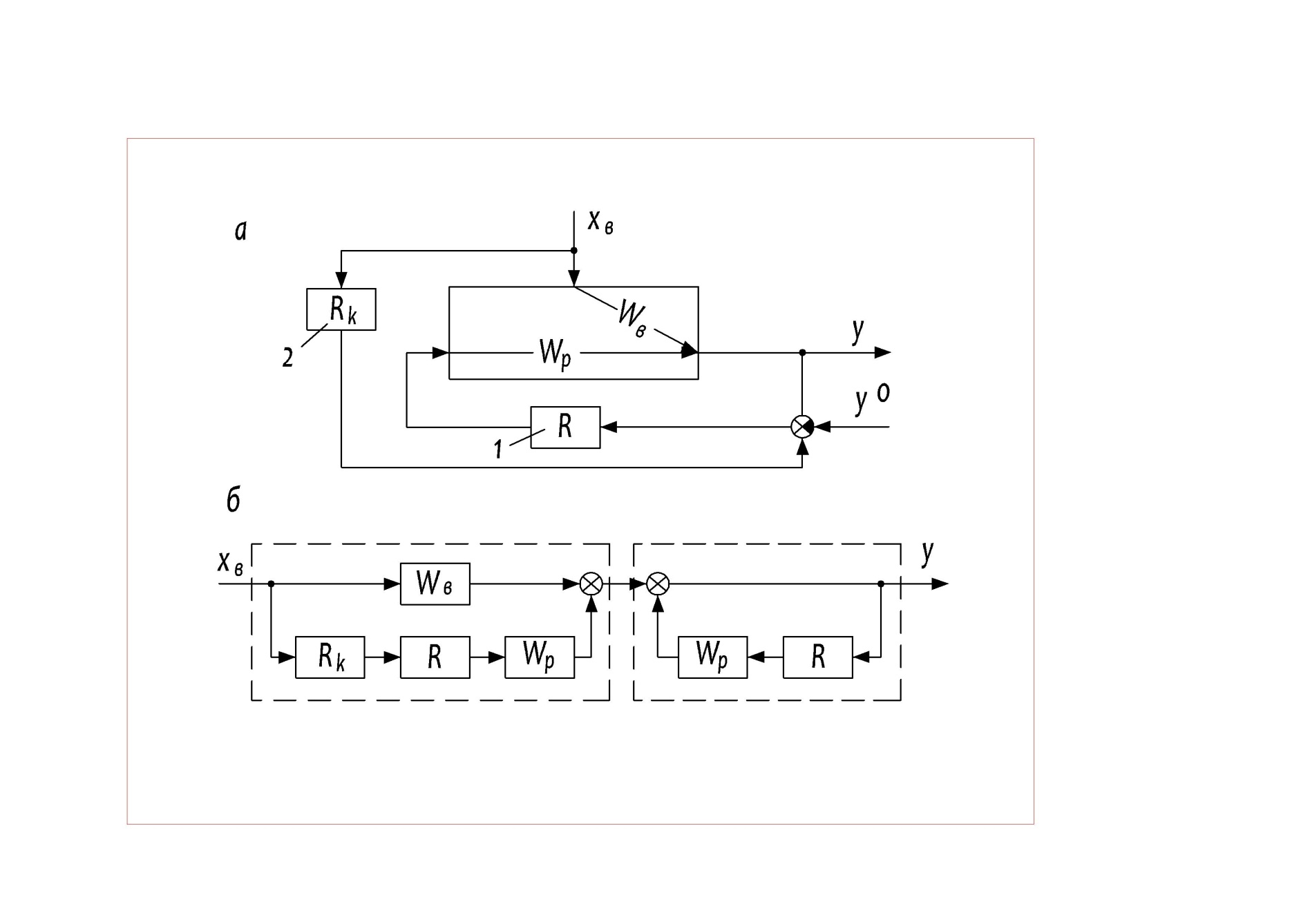
Рис. 25. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход регулятора: а – исходная схема; б – преобразованная схема; 1 – регулятор; 2 – компенсатор
Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчета динамического устройства, формирующего закон изменения этого воздействия.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
Для выполнения принципа инвариантности необходимы два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Очевидно, что достижение абсолютной инвариантности в реальных системах регулирования практически невозможно. Обычно ограничиваются частичной инвариантностью по отношению к наиболее опасным возмущениям. Рассмотрим условие инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию.
Условие инвариантности разомкнутой и комбинированной АСР. Рассмотрим условие инвариантности разомкнутой системы (рис. 26): y(t)= 0.

Рис. 26. Структурная схема разомкнутой АСР
Переходя к изображениям по Лапласу ХВ(р) и Y(p) сигналов xВ(t) и y(t), перепишем это условие с учетом передаточных функций объекта по каналам возмущения WB(p) и регулирования WР(p) и компенсатора RK(p):
Y(р) = ХВ(р) [WB(р) + Rk(Р) WP (p)]  0. (97)
0. (97)
При наличии возмущения[  ] условие инвариантности (97) выполняется, если
] условие инвариантности (97) выполняется, если
WB(p) + Rk(p)WP(р)=0, (98)
откуда
Rk( ) = -WВ ()/WР(). (99)
) = -WВ ()/WР(). (99)
Таким образом, для обеспечения инвариантности системы регулирования по отношению к какому-либо возмущению необходимо установить динамический компенсатор, передаточная функция которого равна отношению передаточных функций объекта по каналам возмущения и регулирования, взятому с обратным знаком.
Выведем условия инвариантности для комбинированных АСР. Для случая, когда сигнал от компенсатора подается на вход объекта (см. рис. 24, a), структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой системы и замкнутого контура (см. рис. 24, б), передаточные функции которых соответственно равны:
 , (100)
, (100)
 .
.
При этом условие инвариантности (97) записывается в виде:

Если XB(p)  0 и WЗС (р)
0 и WЗС (р)  , должно выполняться условие:
, должно выполняться условие:

т.е. условие инвариантности.
При использовании комбинированной системы регулирования (см. рис.25, а) вывод условий инвариантности приводит к соотношениям ( см. рис.25, б):
 (100)
(100)
 (101)
(101)
 (102)
(102)
Если XB(p) 0 и WЗС(р) , то должно выполняться условие:

откуда
Rк (р) = -WВ (р) /[R(p)Wp(p)]. (103)
Таким образом, при подключении выхода компенсатора на вход регулятора передаточная функция компенсатора, полученная из условия инвариантности, будет зависеть от характеристик не только объекта, но и регулятора.
Условия физической реализуемости инвариантных АСР. Одной из основных проблем, возникающих при построении инвариантных систем регулирования, является их физическая реализуемость, т.е. реализуемость компенсатора, отвечающего условиям (99) или (103).
В отличие от обычных промышленных регуляторов, структура которых задана и требуется лишь рассчитать их настройки, структура динамического компенсатора полностью определяется соотношением динамических характеристик объекта по каналам возмущения и регулирования и может оказаться очень сложной, а при неблагоприятном соотношении этих характеристик — физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в двух случаях:
- если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения. В этом случае идеальный компенсатор должен содержать звено упреждения, так как если:
 (104)
(104)
и
 , (105)
, (105)
то с учетом (99):
 (106)
(106)
при  .
.
- если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья. Такой результат получается при определенном соотношении порядков дифференциальных уравнений, описывающих каналы возмущения и регулирования. Пусть
WВ(р) = Вв(Р)/[AB(Р)] и Wp(p)= Вр(Р)/[Aр(Р)], (107)
где Вв(Р), АВ(р), ВР(р), АР(р) — полиномы степеней тВ, nB, mР и nр соответственно.
Тогда

и
mK = mB + np; nк = nв + mр.
Таким образом, условие, физической реализуемости инвариантной АСР заключается в том, чтобы выполнялись соотношения:
τв≥ τр и mB + np ≤ nв + mр. (108)
Пример. Рассмотрим систему регулирования температуры в химическом, реакторе с перемешивающим устройством, в котором протекает экзотермическая реакция (рис. 27).

Рис. 27. Принципиальная схема химического реактора с перемешивающим устройством:1 – измеритель температуры; 2 – регулирующий клапан; 3 – измеритель расхода
Пусть основной канал возмущения — «расход реакционной смеси — температура в реакторе» — аппроксимируется двумя апериодическими звеньями первого порядка, а канал регулирования — «расход хладоагента — температура в реакторе» — тремя апериодическими звеньями первого порядка:
 , (109)
, (109)
 , (110)
, (110)
где T 1, T 2, Т 3 – наибольшие постоянные времени основных тепловых емкостей реактора, термометра и охлаждающей рубашки.
Для построения инвариантной системы регулирования согласовано выражению (99) необходимо ввести компенсатор с передаточной функцией:
 , (111)
, (111)
который физически нереализуем, так как в данном случае нарушается условие и компенсатор должен содержать идеальное дифференцирующее звено.
Задание
В соответствии с примером произвести разработку системы регулирования для ректификационной установки. Расчитать  ,
,  ,
,  .
.
Исходные данные.
1. Схема ректификационной установки (рис. 28). Установка состоит из колонны ректификации К, теплообменника подогрева исходной смеси T-1, кипятильника Т-2, конденсатора Т-3 и флегмовой емкости Е.
В колонне осуществляется разделение бинарной смеси. Температуры кипения разделяемых компонентов существенно различаются, вследствие чего колонна имеет небольшое число тарелок и небольшую высоту. Запаздывания и инерционность по каналам передачи возмущающих и управляющих воздействий относительно невелики. Имеют место сильные внутренние перекрестные связи между основными контролируемыми (регулируемыми) величинами процесса - составами (температурами) дистиллята и кубового продукта.
В паровом потоке, выходящем с верха ректификационной колонны, содержатся неконденсируемые в условиях работы теплообменника Т-3 компоненты в инертные газы. Они отводятся из емкости орошения на сдувку (в топливную сеть).
Режим работа установки подвержен большим и частым возмущениям: по расходу F и составу XF сырья; по давлению (расходу) греющего агента, подаваемого в теплообменник T-I и кипятильник Т-2; по давлению (расходу) хладагента, подаваемого в конденсатор Т-3.
«Ключевые» управления процессом ректификации – это регулирующие органы на линии подачи флегмы в колонну К и линии подачи греющего агента в кипятильник Т-2.

Рис. 28. Схема ректификационной установки
2. Заданы динамические параметры объекта: (постоянные времени Т; запаздывания τ; коэффициент передачи К об) по каналам:
а. «изменение положения регулирующего органа P01 – расход сырья F» ( ХР 1
ХР 1  F);
F);
б. «изменение положения регулирующего органа P02 – расход греющего агенте F 1» ( ХР 2 F 1 );
б*. «изменение положения регулирующего органа Р02 - температура сырья θ F после T-1» ( ХР 2 θ F);
в. «изменение положения регулирующего органа Р03 - состав дистиллята ХD» ( ХР 3 ХD);
г. «изменение положения регулирующего органа Р04 - давление Р в колонне» ( ХР 4 P);
д. «изменение положения регулирующего органа Р05 - уровень в кубе колонны» ( XР 5 L);
е. «изменение положения регулирующего органа Р02 * - температура сырья θ F после T-1» ( XР 2 * θ F);
ж. «изменение положения регулирующего органа Р04 * - давление P в колонне» ( XР 4 * Р);
з. «изменение положения регулирующего органа Р06 - температура в кубе колонны» ( XР 6 θ К);
з*. «изменение положения регулирующего органа РО6 - температура θB вверху колонны» ( XР 6 θ B);
и. «изменение положения регулирующего органа РОЗ - температура θ B вверху колонны» ( X Р3 θ B);
и*. «изменение положения регулирующего органа РОЗ - температураθ К низа колонны» ( XР 3 θ К).
3. Заданы величины действующих на объект возмущений, выраженные в % хода регулирующего органа:
а) канал XР 1 F (по расходу сырья F);
б) каналы XР 2 F1, XР2 θF (по давления греющего агента P 1 и его теплосодержанию q 1);
в) канал XР 3 XD (по составу сырья XF);
г) канал XР4 P (по давлению Р 2 хладагента, подаваемого в конденсатор Т-3);
д) канал XР 5 L (по теплосодержанию q 2 греющего агента, подаваемого в кипятильник Т-2).
4. Заданы требования к качеству процесса регулирования (динамическая ошибка Хmax, время регулирования tP, степень затухания переходных процессов ψ, статическая ошибка регулирования Х cm).
Исходные данные по п. 2 задания (п.п. а - д), п. 3 и п. 4 приведены в табл. 9, a по пунктам 2 (е, ж, з, и) - в табл. 10 исходных данных.
Таблица 9. Динамические параметры объекта и требования к качеству процесса регулирования
| Объект (канал
регулирования)
| Динамические параметры
| размерность
| Варианты
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| Т
| с
мин
с
мин
мин
мин
| 8,0
6,2
6,0
4,8
3,6
3,6
| 8,4
6,5
7,0
5,0
4,0
4,0
| 9,0
6,6
6,5
4,6
3,8
2,8
|
5,9
8,5
4,5
3,0
4,5
| 9,4
5,8
12,0
4,9
4,2
4,2
| 9,6
6,8
10,0
8,0
4,5
3,0
| 10,4
6,3
7,1
4,7
3,0
3,7
| 8,2
6,1
6,4
4,4
3,5
4,8
| 9,8
5,9
7,2
5,1
4,3
5,0
| 12,0
5,5
8,0
5,0
2,7
3,4
| 10,5
5,4
8,4
4,7
3,1
4,6
| 11,6
5,3
8,8
5,2
4,4
4,4
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| КОБ
| ед.изм.рег.вел.
% хода р. о.
| 3,9
0,40
0,80
0,01
0,01
16,0
| 4,0
0,48
0,60
0,012
0,10
32,0
| 3,8
0,44
0,70
0,011
0,07
20,0
| 3,9
0,40
0,80
0,01
0,08
30,0
| 4,2
0,43
0,85
0,012
0,07
30,0
| 4,1
0,50
0,82
0,01
0,10
50,0
| 4,3
0,58
0,80
0,012
0,08
27,0
| 3,9
0,42
0,78
0,014
0,047
23,4
| 4,4
0,50
0,81
0,01
0,05
29,2
| 4,1
0,47
0,78
0,011
0,05
18,0
| 3,7
0,60
0,83
0,014
0,08
24,0
| 4,05
0,48
0,80
0,012
0,075
35,0
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| τ
| с
мин
с
мин
мин
мин
| 2,0
4,6
1,5
2,9
1,9
1,8
| 2,1
4,8
2,0
3,0
1,8
2,2
| 2,3
4,9
1,8
2,8
1,5
1,3
| 2,5
4,3
2,3
2,7
1,8
2,4
| 2,4
4,2
3,0
2,9
1,9
2,6
| 2,5
5,0
2,5
3,1
2,0
1,2
| 2,6
4,7
2,0
2,8
2,7
1,6
| 2,1
4,5
1,9
2,6
2,1
2,5
| 2,5
4,4
2,1
3,0
2,0
2,7
| 3,2
4,1
2,2
3,1
1,9
2,0
| 2,6
4,0
2,1
2,8
2,5
2,8
| 3,0
3,9
2,2
3,0
2,0
2,3
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| хВ
| % хода р. о.
|
|
|
|
|
|
|
|
|
|
|
|
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| Хmax
| м3/ч
0С
м3/ч
м.доли
кгс/см2
мм
|
5,0
8,0
0,05
0,8
|
6,0
6,0
0,06
0,7
|
5,5
7,0
0,055
0,6
|
6,0
7,8
0,05
0,75
|
5,6
8,2
0,06
0,5
|
5,2
7,9
0,05
0,9
|
6,1
8,3
0,06
1,0
|
5,4
8,0
0,07
0,85
|
5,3
8,1
0,05
0,50
|
5,7
8,4
0,055
0,80
|
6,2
7,9
0,07
0,94
|
6,0
7,6
0,06
0,65
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| tP
| с
мин
с
мин
мин
мин
|
|
|
|
|
|
|
|
|
|
|
|
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| Ψ
| 0,75
|
| ΔХР1→ ΔF
ΔХР2→ ΔθF
ΔХР2→ ΔGn
ΔХР3 → ΔXD
ΔХР4→ ΔP
ΔХР5 → ΔL
| хсm
| м3/ч
0С
м3/ч
м.доли
кгс/см2
мм
|
3,8
|
2,6
|
3,0
|
2,9
|
3,2
|
3,4
|
3,1
|
2,9
|
4,2
|
2,8
|
4,0
|
3,6
|
Таблица 10. Динамические параметры объекта и требования к качеству процесса регулирования
| Объект (канал
регулирования)
| Динамические параметры
| Размерность
| Варианты
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ΔХ*Р2→ ΔθF
ΔХ*Р4→ ΔP
| Т
| мин
мин
| 3,4
1,6
| 2,8
1,4
| 2,6
1,9
| 3,2
1,8
| 2,4
1,3
| 2,7
1,5
| 3,1
1,2
| 3,3
1,8
| 2,2
2,0
| 2,8
1,0
| 2,9
1,6
| 2,0
2,1
|
| ΔХ*Р2→ ΔθF
ΔХ*Р4→ ΔP
ΔХР6→ ΔθК
ΔХР6→ ΔθВ
ΔХР3→ ΔθВ
ΔХР3 → ΔθF
| 
| ед.изм.рег.вел.
% хода р. о.
| 0,58
0,15
| 0,60
0,10
| 0,64
0,075
| 0,80
0,08
| 0,86
0,09
| 0,75
0,15
| 0,82
0,14
| 0,76
0,10
| 0,94
0,08
| 0,76
0,10
| 0,90
0,16
| 0,80
0,10
|
| К11
К12
К22
К21
| 0,70
0,50
0,80
0,40
| 0,80
0,60
0,90
0,50
| 0,80
0,40
0,70
0,50
| 0,80
0,60
0,90
0,70
| 0,90
0,80
0,70
0,60
| 0,80
0,50
0,80
0,60
| 0,90
0,80
0,90
0,70
| 0,90
0,80
0,80
0,70
| 0,90
0,40
0,80
0,75
| 0,70
0,50
0,60
0,40
| 0,85
0,55
0,70
0,50
| 0,85
0,70
0,90
0,65
|
| ΔХ*Р2→ ΔθF
ΔХ*Р4→ ΔP
| τ
| мин
мин
| 1,5
0,38
| 1,4
0,33
| 1,2
0,44
| 1,7
0,40
| 1,4
0,30
| 1,3
0,35
| 1,5
0,27
| 1,6
0,41
| 1,0
0,46
| 1,3
0,25
| 1,5
0,40
| 1,0
0,50
|
Контрольные вопросы
1. Каскадные АСР в схемах управления технологическими процессами. Принципы их построения и функционирования. Примеры каскадных АСР в промышленности и энергетике.
2. Комбинированные АСР в схемах управления технологическими процессами. Принципы построения и функционирования. Условия физической реализуемости. Примеры комбинированных АСР в промышленности и энергетике.
ПРАКТИКУМ № 8 (2 часа)







