

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Мостовые средства измерения сопротивлений широко применяются в теплоэнергетических установках. На рис.5,а показана простейшая схема четырехплечего моста. Мост состоит из четырех резисторов, источника питания и измерительного прибора. Точки а и b образуют диагональ питания, а точки с и d – измерительную диагональ. Точки а, b, c, d называются вершинами моста. Резисторы между двумя соседними вершинами – R1, R2, RM, RX образуют плечи моста, RX – резистор, сопротивление которого нужно измерить. Плечи, не имеющие общих вершин называются противолежащими (резисторы R1 и RM, R2 и RX). Плечи, имеющие общую вершину, называются смежными (резисторы R1 и RX, RM и RX, R1 и R2, R2 и RM. Плечи моста могут состоять из нескольких резисторов, резисторы могут быть включены также в диагонали. Плечи моста могут быть образованы не только активными сопротивлениями, но и индуктивными, емкостными, а также их сочетаниями.
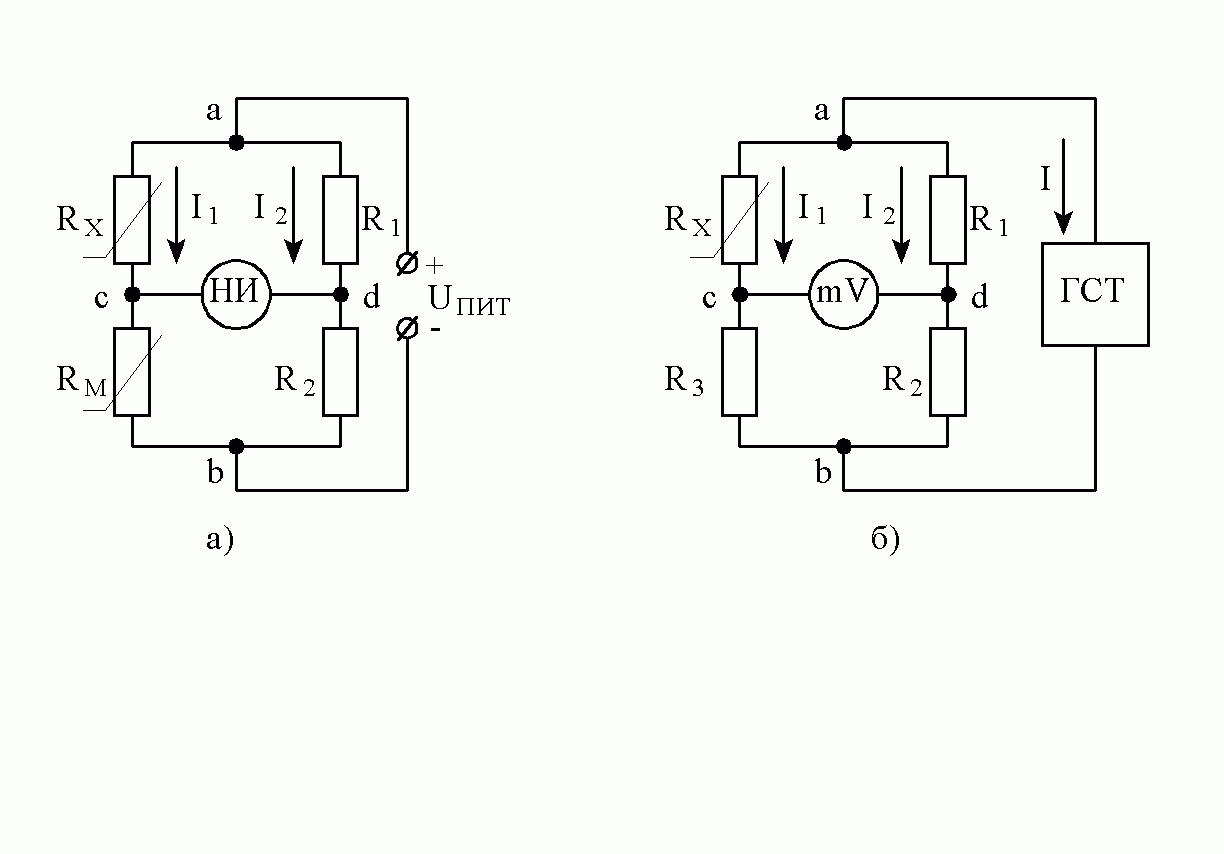 Рис. 5. Схемы уравновешенного (а) и неуравновешенного (б) мостов
Рис. 5. Схемы уравновешенного (а) и неуравновешенного (б) мостов
|
Мостовые схемы подразделяются на уравновешенны е (рис.13,а) и неуравновешенные (рис.5,б). Состояние моста, при котором напряжение между точками с и d равна нулю, называют равновесным, а мост в таком состоянии называется уравновешенным. Для уравновешивания моста при измерениях RX используется переменное сопротивление известной величины, например, магазин сопротивлений RM. Очевидно, что при равновесии моста RXI1 = R1I2 и RМI1 = R2I2. Разделив эти равенства, получим
RX /RM = R1 /R2 или RX R2 = R1 Rм, т.е. условием равновесия моста является равенство произведений сопротивлений противолежащих плеч моста. Из уравнения следует, что
|
Плечи R1 и R2 называются плечами соотношения, так как они определяют масштаб уравновешивающего сопротивления магазина.
Из полученного уравнения видно, что результат измерения не зависит от напряжения источника питания. Измерительный прибор выполняет только функции нуль-индикатора (НИ), фиксирующего отклонение напряжения измерительной диагонали от нулевого значения.
В неуравновешенных мостах напряжение измерительной диагонали изменяется с изменением измеряемого сопротивления, и плечи моста не содержат уравновешивающих элементов. Сопротивление плеч моста выбирается так, чтобы при температуре 0°С мост находился в равновесии. В этом случае указательная стрелка милливольтметра будет находиться на нулевом делении шкалы. При увеличении температуры сопротивление терморезистора RX возрастает и между вершинами c и d появляется положительное напряжение разбаланса. Питание моста осуществляется от генератора стабильного тока (ГСТ), который обеспечивает постоянство тока в цепи питания вне зависимости от сопротивления его нагрузки. Применение генератора стабильного тока для питания моста обеспечивает линейную зависимость напряжения в измерительной диагонали от величины изменения RX.
В схеме моста на рис.5 не учтены сопротивления двух соединительных проводов, с помощью которых термометр сопротивления подключается к схеме моста. Обозначим сопротивление каждого из проводов через RЛ (рис.6,а), сопротивление терморезистора – RT. Тогда при равновесии моста будет выполнятся условие (RT + 2RЛ)R2 = R1 Rм. Из уравнения следует
|
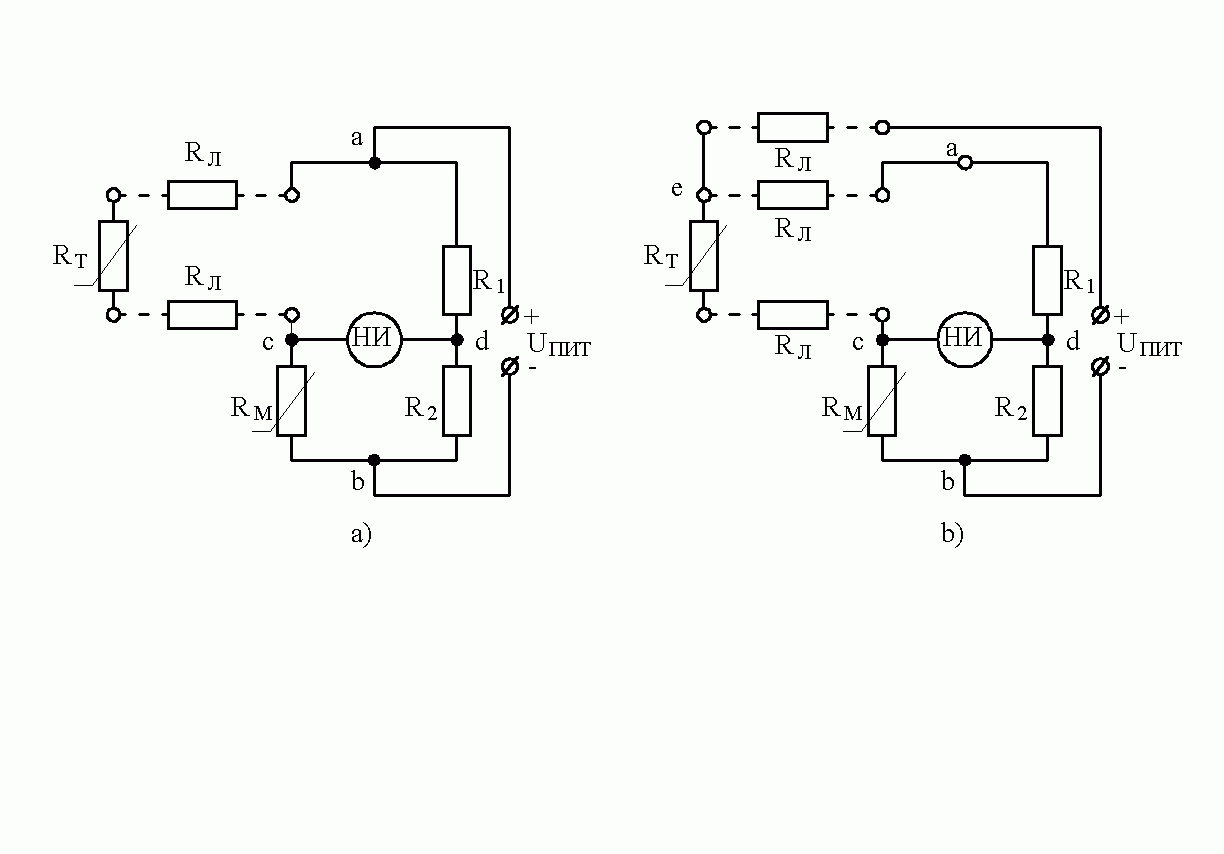 Рис. 6. Подключение термометра сопротивления по двухпроводной (а) и трехпроводной (б) схемам
Рис. 6. Подключение термометра сопротивления по двухпроводной (а) и трехпроводной (б) схемам
|
Длина соединительных проводов может изменяться в широких пределах, поэтому для стабилизации характеристик моста сопротивление RЛ увеличивают с помощью добавочного сопротивления до стандартного значения (обычно 2,5 Ом). Для этой цели в схеме моста имеются специальные подгоночные катушки. Но даже в этом случае сопротивление соединительных проводов будет меняться при изменении температуры окружающей среды. Очевидно, что на изменение RЛ (при неизменном RT) мост будет реагировать как на изменение RT. В результате возникнет дополнительная погрешность. Для снижения этой погрешности используют трехпроводную схему подключения термометра сопротивления (рис.6,а). В этой схеме источник питания подключается не к точке a моста, как в двухпроводной схеме, а к третьему выводу термометра сопротивления в точке e. Перенос диагонали питания приводит к изменению плеч моста и, соответственно, изменению условия равновесия R2 (RT + RЛ) = Rм (R1 + RЛ). Отсюда получаем уравнение для определения RT:
|
Из уравнений видно, что применение трехпроводной схемы подключения термометра сопротивления уменьшает влияние соединительной линии на измерение RT. Если R2 = Rм, то сопротивление соединительной линии вообще не будет влиять на результаты измерения.
В теплоэнергетике широко применяются автоматические уравновешенные мосты типа КСМ. Упрощенная схема такого моста с двухпроводной схемой подключения термометра сопротивления приведена на рис.7,а. Уравновешивание моста при изменении сопротивления RT осуществляется автоматически реверсивным двигателем РД, перемещающим движок реохорда РР. Реохордом называется проволочный резистор, намотанный на изолированный стержень определенной длины. Сопротивление реохорда имеет фиксированное значение (обычно 90 Ом), линейно распределенное по заданной длине, равной длине шкалы (100 мм для автоматических мостов КСМ1 и 250 мм для КСМ4). На реохорде находится подвижный контакт – движок, который перемещается по проволочной намотке реохорда реверсивным двигателем через кинематическую связь (показана штриховой линией). Движок реохорда образует вершину моста с. С движком жестко связана указательная стрелка, перемещающаяся вдоль показывающей шкалы прибора. Балластный резистор RБ ограничивает ток через термометр сопротивления, во избежание его нагрева рабочим током.
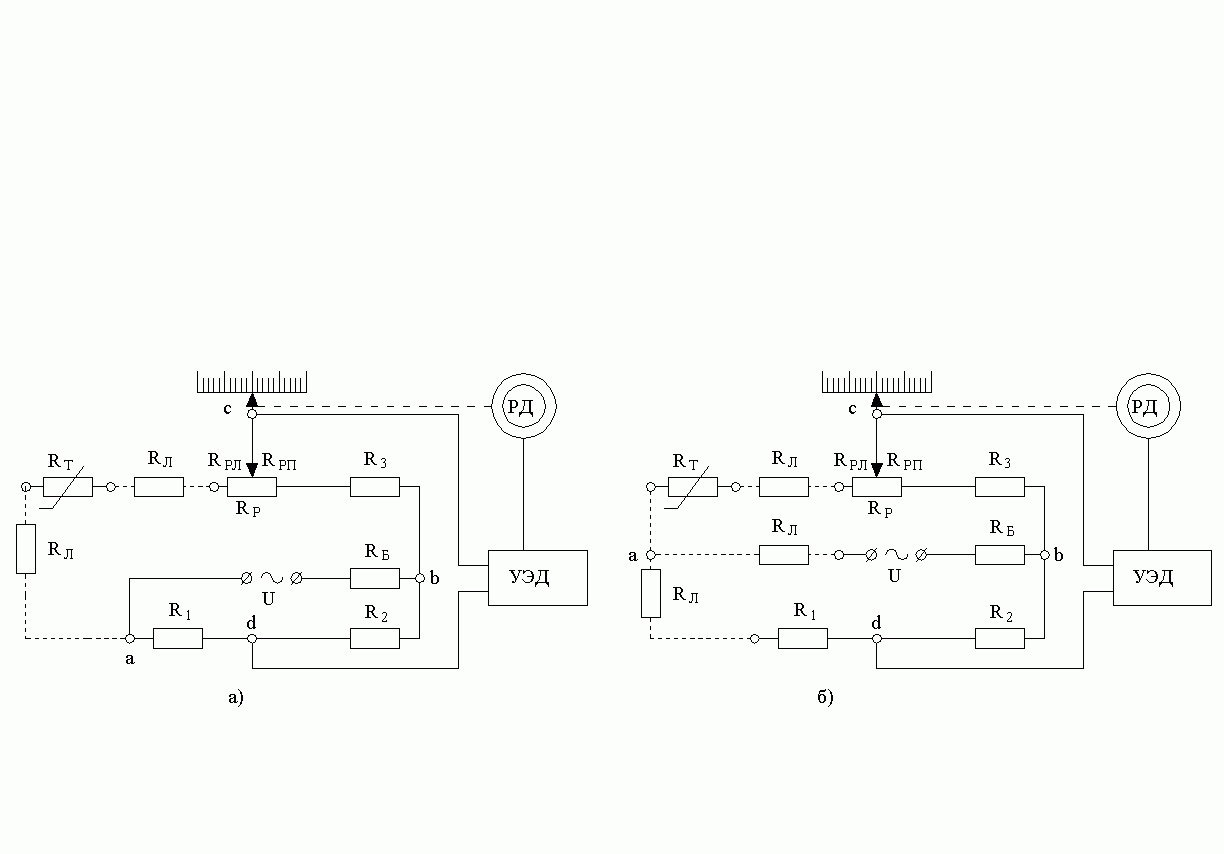 Рис. 7. Схема автоматического уравновешенного моста с двухпроводным (а) и трехпроводным (б) подключением термометра сопротивления
Рис. 7. Схема автоматического уравновешенного моста с двухпроводным (а) и трехпроводным (б) подключением термометра сопротивления
|
Измерительная диагональ моста образована вершинами с и d, а диагональ питания – вершинами а и b. Движок реохорда делит сопротивления реохорда на две части. Сопротивление правой части реохорда обозначим RРП, а левой - RРЛ. Из рисунка видно, что левая и правая части реохорда относятся к разным плечам моста. Условие равновесия моста определяется выражением R2 (RT +2RЛ + RРЛ) = R1 (R3 + RРП). При любом изменении измеряемой температуры происходит разбаланс моста и между вершинами с и d появляется напряжение ΔU с фазой, определяющей направление смещения движка реохорда. Напряжение усиливается усилителем УЭД и подается на реверсивный двигатель РД. Двигатель через кинематическую связь начинает перемещать движок реохорда в направлении равновесия мостовой схемы. Перемещение движка продолжается до установления нового равновесного состояния моста. Это равновесное состояние будет соответствовать новому значению измеряемой температуры.
В рассмотренной схеме, как и в схеме рис.6,а, на показания прибора будет оказывать влияние изменение сопротивления соединительной линии при изменении температуры окружающей среды. Для уменьшения этого влияния применяется трехпроводная схема подключения термометра сопротивления (рис.7,б). Для этой схемы условие равновесия моста определяется выражением R2 (RT + RЛ + RРЛ) = (R1 + RЛ)(R3 + RРП). Поскольку сопротивление RЛ входит в обе части уравнения равновесия, то изменение сопротивления соединительных проводов будет оказывать меньшее влияние по сравнению с двухпроводной схемой.
|
|
|

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
© cyberpedia.su 2017-2025 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

